Download presentation
Presentation is loading. Please wait.

1
In-Vehicle Networking for Heavy Duty Systems Review of CAN / SAE J1939/ ISO 11783 BAE 5030 Fall 2001 Instructor: Marvin Stone BAE 5030 Fall 2001 Instructor: Marvin Stone

2
General overview of CAN based networking Is it a worldwide standard? Is it a worldwide standard? Is it really a standard? Is it really a standard? Where did it come from? Where did it come from? Why? Why? Vehicles covered? Vehicles covered? How many flavors are there? How many flavors are there? Is it a worldwide standard? Is it a worldwide standard? Is it really a standard? Is it really a standard? Where did it come from? Where did it come from? Why? Why? Vehicles covered? Vehicles covered? How many flavors are there? How many flavors are there? FAQFAQ

3
What is “It” CAN CAN – Controller Area Network ISO 11783 ISO 11783 – Network standard for Ag / Forestry SAE J1939 SAE J1939 – Network standard for Heavy Duty Vehicles On-highway Trucks / Buses On-highway Trucks / Buses Off-highway Off-highway – Construction – Ag and Forestry - See ISO 11783 CAN CAN – Controller Area Network ISO 11783 ISO 11783 – Network standard for Ag / Forestry SAE J1939 SAE J1939 – Network standard for Heavy Duty Vehicles On-highway Trucks / Buses On-highway Trucks / Buses Off-highway Off-highway – Construction – Ag and Forestry - See ISO 11783

4
(See http://www.vector-cantech.com/documents/canover.pdf)

5
To form a complete communications system you need more than CAN ISO 7498

6
CANCAN – CAN = Controller Area Network Serial data communications protocol for real-time application using a multiple access bus Serial data communications protocol for real-time application using a multiple access bus – Messages have assignable priority most critical can dominate during heavy load most critical can dominate during heavy load – Messages are short (controlled length) opportunities to insert a new message come often opportunities to insert a new message come often – Serial communications – Serial point-to-point vs. bus Reduction in wiring complexity Reduction in wiring complexity Better information sharing Better information sharing – Low probability of an undetected error 4.7 x 10 -11 x message error rate 4.7 x 10 -11 x message error rate – For a message error rate of 25/sec: 1 undetected error per 10,000 hours operation – CAN = Controller Area Network Serial data communications protocol for real-time application using a multiple access bus Serial data communications protocol for real-time application using a multiple access bus – Messages have assignable priority most critical can dominate during heavy load most critical can dominate during heavy load – Messages are short (controlled length) opportunities to insert a new message come often opportunities to insert a new message come often – Serial communications – Serial point-to-point vs. bus Reduction in wiring complexity Reduction in wiring complexity Better information sharing Better information sharing – Low probability of an undetected error 4.7 x 10 -11 x message error rate 4.7 x 10 -11 x message error rate – For a message error rate of 25/sec: 1 undetected error per 10,000 hours operation
 opportunities to insert a new message come often opportunities to insert a new message come often – Serial communications – Serial point-to-point vs. bus Reduction in wiring complexity Reduction in wiring complexity Better information sharing Better information sharing – Low probability of an undetected error 4.7 x x message error rate 4.7 x x message error rate – For a message error rate of 25/sec: 1 undetected error per 10,000 hours operation.")
7
Communications Bus

8
T Bus Topology Constraints – Constraints NO “T” Connections NO “T” Connections No bus extension without a bridge No bus extension without a bridge – Constraints NO “T” Connections NO “T” Connections No bus extension without a bridge No bus extension without a bridge

9
CAN - continued Developed by Bosch GmBh (See http://www.vector-cantech.com/documents/can2spec.pdf) Developed by Bosch GmBh (See http://www.vector-cantech.com/documents/can2spec.pdf) – About 1986, Version 2.0 in 1991 for auto apps. Version 1.2 (Equivalent to 2.0A) Version 1.2 (Equivalent to 2.0A) – 11 bit ID (not interoperable with 29 bit 2.0b) Version 2.0 (2.0A + 2.0B) Version 2.0 (2.0A + 2.0B) – 2.0B - 11 and 29 bit ID 11 and 29 are compatible on same bus 11 and 29 are compatible on same bus 11 bit only 2.0B is called 2.0B passive 11 bit only 2.0B is called 2.0B passive 29 bit (and 11bit) 2.0B called 2.0B active 29 bit (and 11bit) 2.0B called 2.0B active – CAN provides only Data Link functions Media access control Media access control Logical link control Logical link control Developed by Bosch GmBh (See http://www.vector-cantech.com/documents/can2spec.pdf) Developed by Bosch GmBh (See http://www.vector-cantech.com/documents/can2spec.pdf) – About 1986, Version 2.0 in 1991 for auto apps. Version 1.2 (Equivalent to 2.0A) Version 1.2 (Equivalent to 2.0A) – 11 bit ID (not interoperable with 29 bit 2.0b) Version 2.0 (2.0A + 2.0B) Version 2.0 (2.0A + 2.0B) – 2.0B - 11 and 29 bit ID 11 and 29 are compatible on same bus 11 and 29 are compatible on same bus 11 bit only 2.0B is called 2.0B passive 11 bit only 2.0B is called 2.0B passive 29 bit (and 11bit) 2.0B called 2.0B active 29 bit (and 11bit) 2.0B called 2.0B active – CAN provides only Data Link functions Media access control Media access control Logical link control Logical link control
 Version 1.2 (Equivalent to 2.0A) – 11 bit ID (not interoperable with 29 bit 2.0b) Version 2.0 (2.0A + 2.0B) Version 2.0 (2.0A + 2.0B) – 2.0B - 11 and 29 bit ID 11 and 29 are compatible on same bus 11 and 29 are compatible on same bus 11 bit only 2.0B is called 2.0B passive 11 bit only 2.0B is called 2.0B passive 29 bit (and 11bit) 2.0B called 2.0B active 29 bit (and 11bit) 2.0B called 2.0B active – CAN provides only Data Link functions Media access control Media access control Logical link control Logical link control Developed by Bosch GmBh (See Developed by Bosch GmBh (See – About 1986, Version 2.0 in 1991 for auto apps. Version 1.2 (Equivalent to 2.0A) Version 1.2 (Equivalent to 2.0A) – 11 bit ID (not interoperable with 29 bit 2.0b) Version 2.0 (2.0A + 2.0B) Version 2.0 (2.0A + 2.0B) – 2.0B - 11 and 29 bit ID 11 and 29 are compatible on same bus 11 and 29 are compatible on same bus 11 bit only 2.0B is called 2.0B passive 11 bit only 2.0B is called 2.0B passive 29 bit (and 11bit) 2.0B called 2.0B active 29 bit (and 11bit) 2.0B called 2.0B active – CAN provides only Data Link functions Media access control Media access control Logical link control Logical link control.")
10
An overview of CAN based networking CAN - Elements CAN - Elements – CSMA/CA Bitwize priority access strategy Bitwize priority access strategy Non-destructive collisions Non-destructive collisions – Message components Identifier / Data Identifier / Data – Bus Access - Arbitration / Prioritization – Error Detection / Error Confinement – Filtering – Other features In Frame Acknowledgement In Frame Acknowledgement RTR RTR CAN - Elements CAN - Elements – CSMA/CA Bitwize priority access strategy Bitwize priority access strategy Non-destructive collisions Non-destructive collisions – Message components Identifier / Data Identifier / Data – Bus Access - Arbitration / Prioritization – Error Detection / Error Confinement – Filtering – Other features In Frame Acknowledgement In Frame Acknowledgement RTR RTR

11
Other options for electronic controls Just don’t do it Just don’t do it Central CPU - Central CPU - Earlier protocols in Heavy Duty Equipment Earlier protocols in Heavy Duty Equipment CCD (Bus) - Chrysler Collision Detection - Deere and Co. CCD (Bus) - Chrysler Collision Detection - Deere and Co. 1708/1587 (RS485 based Bus) - Cat., DICKEYjohn, Flexicoil 1708/1587 (RS485 based Bus) - Cat., DICKEYjohn, Flexicoil Automotive busses Automotive busses J1850 J1850 Echelon Lonworks Echelon Lonworks Proprietary CAN protocols Proprietary CAN protocols Just don’t do it Just don’t do it Central CPU - Central CPU - Earlier protocols in Heavy Duty Equipment Earlier protocols in Heavy Duty Equipment CCD (Bus) - Chrysler Collision Detection - Deere and Co. CCD (Bus) - Chrysler Collision Detection - Deere and Co. 1708/1587 (RS485 based Bus) - Cat., DICKEYjohn, Flexicoil 1708/1587 (RS485 based Bus) - Cat., DICKEYjohn, Flexicoil Automotive busses Automotive busses J1850 J1850 Echelon Lonworks Echelon Lonworks Proprietary CAN protocols Proprietary CAN protocols
 - Chrysler Collision Detection - Deere and Co. 1708/1587 (RS485 based Bus) - Cat., DICKEYjohn, Flexicoil 1708/1587 (RS485 based Bus) - Cat., DICKEYjohn, Flexicoil Automotive busses Automotive busses J1850 J1850 Echelon Lonworks Echelon Lonworks Proprietary CAN protocols Proprietary CAN protocols Just don’t do it Just don’t do it Central CPU - Central CPU - Earlier protocols in Heavy Duty Equipment Earlier protocols in Heavy Duty Equipment CCD (Bus) - Chrysler Collision Detection - Deere and Co. CCD (Bus) - Chrysler Collision Detection - Deere and Co. 1708/1587 (RS485 based Bus) - Cat., DICKEYjohn, Flexicoil 1708/1587 (RS485 based Bus) - Cat., DICKEYjohn, Flexicoil Automotive busses Automotive busses J1850 J1850 Echelon Lonworks Echelon Lonworks Proprietary CAN protocols Proprietary CAN protocols.")
12
Conventional Wiring (No Bus) Serial Communication Links
 Serial Communication Links")
13
A Simple CAN Application (Serial Bus)
")
14
Typical ECU Components

15
ECU Connection to the bus ECU 1ECU 2 CAN_H CAN_L TBC_PWR Terminator TBC_RTN CAN_H CAN_L CAN_H

16
CAN Frame Components 11 bits or 29 bits IdentifierData 0 to 8 bytes (0 to 64 bits) CAN Frame (up to 134 bits) Serial bit streamStart
 CAN Frame (up to 134 bits) Serial bit streamStart")
17
CAN Frame Format - CAN 2.0B

18
CAN Arbitration Lower numbered identifiers assume higher priority

19
Error Detection 5 Error Types Detected 5 Error Types Detected – Bit Error (Sent bit doesn’t match monitored bit) – Stuff Error (more than 6 successive in one state) – CRC error – Form Error – Acknowledge Error Probability of an undetected error Probability of an undetected error – 4.7 x 10 -11 x message error rate for a message error rate of 25/sec, 1 undetected error per 10,000 hours operation for a message error rate of 25/sec, 1 undetected error per 10,000 hours operation 5 Error Types Detected 5 Error Types Detected – Bit Error (Sent bit doesn’t match monitored bit) – Stuff Error (more than 6 successive in one state) – CRC error – Form Error – Acknowledge Error Probability of an undetected error Probability of an undetected error – 4.7 x 10 -11 x message error rate for a message error rate of 25/sec, 1 undetected error per 10,000 hours operation for a message error rate of 25/sec, 1 undetected error per 10,000 hours operation
 – Stuff Error (more than 6 successive in one state) – CRC error – Form Error – Acknowledge Error Probability of an undetected error Probability of an undetected error – 4.7 x x message error rate for a message error rate of 25/sec, 1 undetected error per 10,000 hours operation for a message error rate of 25/sec, 1 undetected error per 10,000 hours operation 5 Error Types Detected 5 Error Types Detected – Bit Error (Sent bit doesn’t match monitored bit) – Stuff Error (more than 6 successive in one state) – CRC error – Form Error – Acknowledge Error Probability of an undetected error Probability of an undetected error – 4.7 x x message error rate for a message error rate of 25/sec, 1 undetected error per 10,000 hours operation for a message error rate of 25/sec, 1 undetected error per 10,000 hours operation")
20
Message Filtering - Example MASK MATCH 1 = Care, 0= Don’t Care Accept if: (ID AND MASK) XOR MATCH = 0 11100000000 IDENTIFIER 10111100100 10100000000 ID AND MASK 10100000000 = (ID AND MASK) XOR MATCH 00000000000 = Pattern must match
 XOR MATCH = IDENTIFIER ID AND MASK = (ID AND MASK) XOR MATCH = Pattern must match")
21
Essence of ISO 11783 an Electronics communications protocol standard – Allows manufacturers to build electronic components that communicate with each other Examples: Examples: – Instrument cluster and engine Electronic Control Unit (ECU) – Tractor ECU and Implement ECU – Grain Flow ECU and Virtual Terminal ECU – Uses multiplexed wiring ECUs communicate across a shared four wire cable ECUs communicate across a shared four wire cable Bit serial communications Bit serial communications – Based on CAN protocol Robert Bosch GmbH protocol for automotive use Robert Bosch GmbH protocol for automotive use – Allows manufacturers to build electronic components that communicate with each other Examples: Examples: – Instrument cluster and engine Electronic Control Unit (ECU) – Tractor ECU and Implement ECU – Grain Flow ECU and Virtual Terminal ECU – Uses multiplexed wiring ECUs communicate across a shared four wire cable ECUs communicate across a shared four wire cable Bit serial communications Bit serial communications – Based on CAN protocol Robert Bosch GmbH protocol for automotive use Robert Bosch GmbH protocol for automotive use
 – Tractor ECU and Implement ECU – Grain Flow ECU and Virtual Terminal ECU – Uses multiplexed wiring ECUs communicate across a shared four wire cable ECUs communicate across a shared four wire cable Bit serial communications Bit serial communications – Based on CAN protocol Robert Bosch GmbH protocol for automotive use Robert Bosch GmbH protocol for automotive use – Allows manufacturers to build electronic components that communicate with each other Examples: Examples: – Instrument cluster and engine Electronic Control Unit (ECU) – Tractor ECU and Implement ECU – Grain Flow ECU and Virtual Terminal ECU – Uses multiplexed wiring ECUs communicate across a shared four wire cable ECUs communicate across a shared four wire cable Bit serial communications Bit serial communications – Based on CAN protocol Robert Bosch GmbH protocol for automotive use Robert Bosch GmbH protocol for automotive use")
22
Network Structural Model

23
CAN based Ag related standards ISO 11783 uses pieces of J1939 and DIN 9684. ISO 11783 uses pieces of J1939 and DIN 9684. At the CAN level J1939 and 11783 use the same 29 bit CAN 2.0b At the CAN level J1939 and 11783 use the same 29 bit CAN 2.0b ISO 11783 uses pieces of J1939 and DIN 9684. ISO 11783 uses pieces of J1939 and DIN 9684. At the CAN level J1939 and 11783 use the same 29 bit CAN 2.0b At the CAN level J1939 and 11783 use the same 29 bit CAN 2.0b Mention NMEA 2000

24
Standards Bodies Relationships ISO 11783SAE J1939

25
J1939 Document numbering

26
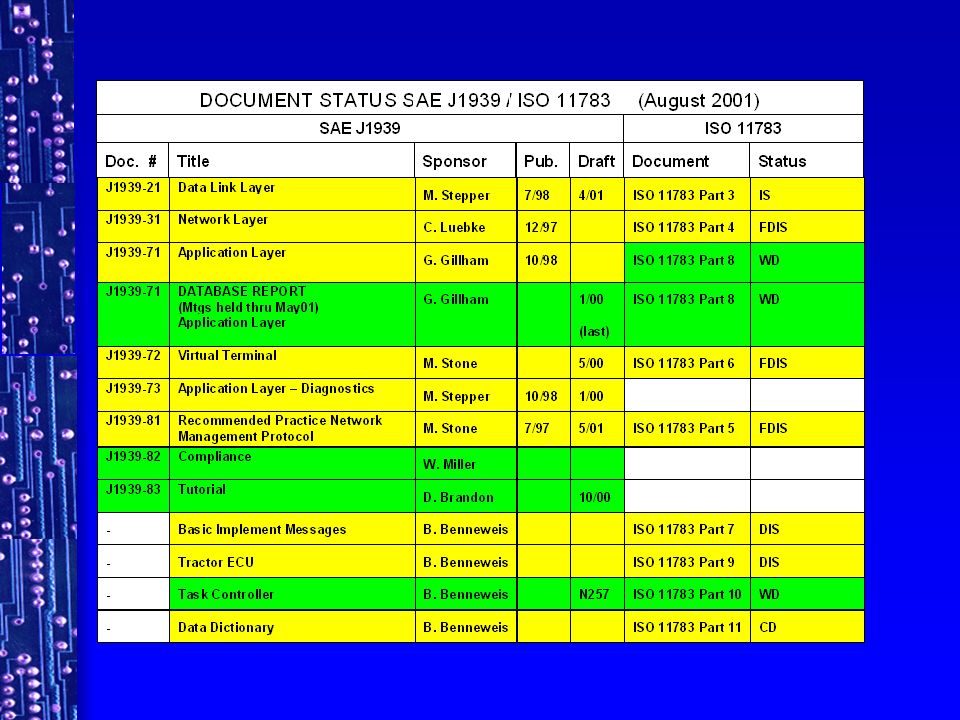
Document Status

28
ISO 11783 Characteristics Attempts to Attempts to Standardize communications to the extent that ECUs built by different manufacturers can communicate. Standardize communications to the extent that ECUs built by different manufacturers can communicate. Allows Allows Ag Implement applications (precision farming apps.) Ag Implement applications (precision farming apps.) Powertrain/Braking/Lighting/Instrument Panel apps. Powertrain/Braking/Lighting/Instrument Panel apps. Standardized and proprietary information exchange Standardized and proprietary information exchange Control loops across net (10 ms repetition) Control loops across net (10 ms repetition) Data rate 5.6k bytes/sec. @ 30% load, bursts to 16k bytes/sec. Data rate 5.6k bytes/sec. @ 30% load, bursts to 16k bytes/sec. 30 nodes per subnet, 254 nodes per system 30 nodes per subnet, 254 nodes per system Attempts to Attempts to Standardize communications to the extent that ECUs built by different manufacturers can communicate. Standardize communications to the extent that ECUs built by different manufacturers can communicate. Allows Allows Ag Implement applications (precision farming apps.) Ag Implement applications (precision farming apps.) Powertrain/Braking/Lighting/Instrument Panel apps. Powertrain/Braking/Lighting/Instrument Panel apps. Standardized and proprietary information exchange Standardized and proprietary information exchange Control loops across net (10 ms repetition) Control loops across net (10 ms repetition) Data rate 5.6k bytes/sec. @ 30% load, bursts to 16k bytes/sec. Data rate 5.6k bytes/sec. @ 30% load, bursts to 16k bytes/sec. 30 nodes per subnet, 254 nodes per system 30 nodes per subnet, 254 nodes per system
 Ag Implement applications (precision farming apps.) Powertrain/Braking/Lighting/Instrument Panel apps. Powertrain/Braking/Lighting/Instrument Panel apps. Standardized and proprietary information exchange Standardized and proprietary information exchange Control loops across net (10 ms repetition) Control loops across net (10 ms repetition) Data rate 5.6k 30% load, bursts to 16k bytes/sec. Data rate 5.6k 30% load, bursts to 16k bytes/sec. 30 nodes per subnet, 254 nodes per system 30 nodes per subnet, 254 nodes per system Attempts to Attempts to Standardize communications to the extent that ECUs built by different manufacturers can communicate. Standardize communications to the extent that ECUs built by different manufacturers can communicate. Allows Allows Ag Implement applications (precision farming apps.) Ag Implement applications (precision farming apps.) Powertrain/Braking/Lighting/Instrument Panel apps. Powertrain/Braking/Lighting/Instrument Panel apps. Standardized and proprietary information exchange Standardized and proprietary information exchange Control loops across net (10 ms repetition) Control loops across net (10 ms repetition) Data rate 5.6k 30% load, bursts to 16k bytes/sec. Data rate 5.6k 30% load, bursts to 16k bytes/sec. 30 nodes per subnet, 254 nodes per system 30 nodes per subnet, 254 nodes per system.")
29
Capacity Comparison

30
Capacity and Performance Use of bus bandwidth by messages Use of bus bandwidth by messages – 100 messages per second (10 ms repetition) =5% Torque/Speed control on engine Torque/Speed control on engine Hitch control Hitch control – 10 messages per second (100 ms repetition) =0.5% Throttle position Throttle position GPS Lat/Lon data GPS Lat/Lon data Implement application rate control (process data) Implement application rate control (process data) – 1 message per second (1s repetition) =0.05% Display updates Display updates System status System status Use of bus bandwidth by messages Use of bus bandwidth by messages – 100 messages per second (10 ms repetition) =5% Torque/Speed control on engine Torque/Speed control on engine Hitch control Hitch control – 10 messages per second (100 ms repetition) =0.5% Throttle position Throttle position GPS Lat/Lon data GPS Lat/Lon data Implement application rate control (process data) Implement application rate control (process data) – 1 message per second (1s repetition) =0.05% Display updates Display updates System status System status
 =5% Torque/Speed control on engine Torque/Speed control on engine Hitch control Hitch control – 10 messages per second (100 ms repetition) =0.5% Throttle position Throttle position GPS Lat/Lon data GPS Lat/Lon data Implement application rate control (process data) Implement application rate control (process data) – 1 message per second (1s repetition) =0.05% Display updates Display updates System status System status Use of bus bandwidth by messages Use of bus bandwidth by messages – 100 messages per second (10 ms repetition) =5% Torque/Speed control on engine Torque/Speed control on engine Hitch control Hitch control – 10 messages per second (100 ms repetition) =0.5% Throttle position Throttle position GPS Lat/Lon data GPS Lat/Lon data Implement application rate control (process data) Implement application rate control (process data) – 1 message per second (1s repetition) =0.05% Display updates Display updates System status System status")
31
Message latency 134 bit message 134 bit message – @ 4 s per bit = 536 s = 0.5 ms per message max Highest priority message Highest priority message – must wait no more than ~0.5 ms Low priority messages Low priority messages – must wait till higher priority messages clear – latency may be long at high bus loads 134 bit message 134 bit message – @ 4 s per bit = 536 s = 0.5 ms per message max Highest priority message Highest priority message – must wait no more than ~0.5 ms Low priority messages Low priority messages – must wait till higher priority messages clear – latency may be long at high bus loads

Similar presentations




![Setha Pan-ngum. History of CAN [1] It was created in mid-1980s for automotive applications by Robert Bosch. Design goal was to make automobiles more reliable,](/13/3602303/big_thumb.jpg "Setha Pan-ngum. History of CAN [1] It was created in mid-1980s for automotive applications by Robert Bosch. Design goal was to make automobiles more reliable,>")
 and point-to-point links, Ethernet,>")
. Functions, performed on the layer. МАС address in Ethernet networks. Layer 1 of the TCP/IP.>")




 Bus. 2 Overview CAN is an important embedded protocol Primarily automotive, but used in many other places CAN specifies:>")


1 CprE 458/558: Real-Time Systems Controller Area Network: Overview (Updated by: Ki-sung Koo, CprE 458/558.>")

 in 1986. As.>")


 ALOHA Slotted ALOHA CSMA CSMA/CD Token Ring /FDDI Fiber Channel Fiber Channel Protocol.>")