Download presentation
Presentation is loading. Please wait.

1
Kaichen Zhao & Junhan Zhu ECE 750 Course Project PID Control for GPS

2
Content Preliminaries3 min Related Work1 min Algorithms5 min Weighted Round Robin WF 2 Q+ Control Method Experiments & Analysis 4 min Conclusion1 min

3
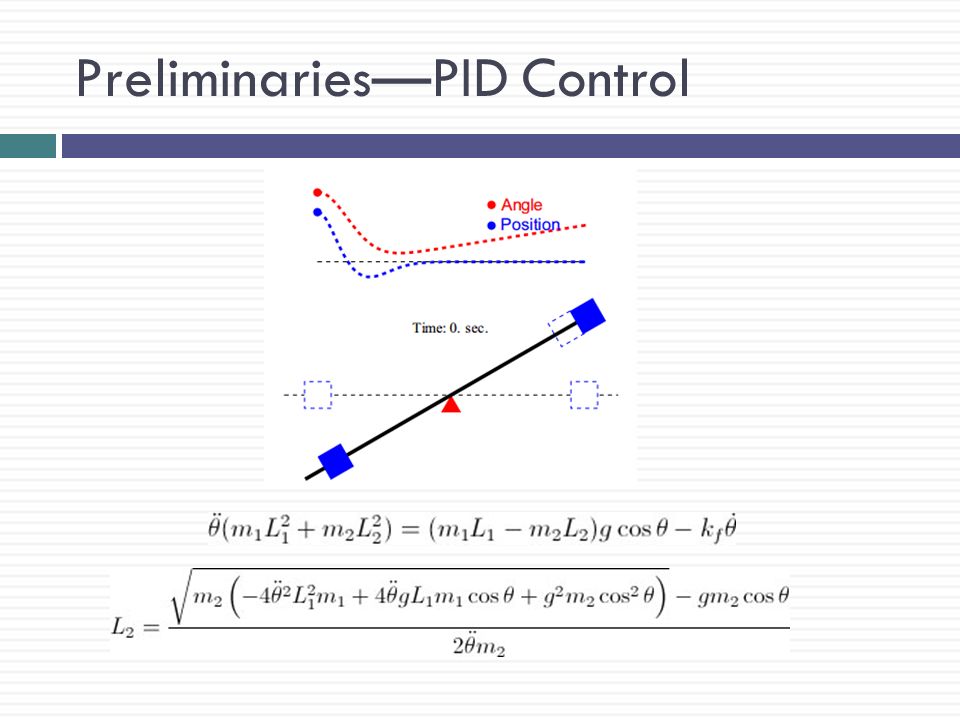
Preliminaries—PID Control Why do we use PID control: Model Free Easy to be calculated in digital system Proportional Integral Derivative

4
Preliminaries—PID Control

8
Preliminaries—GPS GPS: Generalized Processor Sharing

9
Related Works—WRR and WF 2 Q+ Weighted Round RobinWF 2 Q+ -The simplest implementation of GPS. -Each workflow is allocated a time slice to process task in that flow -When the time slice is used up, the server terminate the task and move to next flow -The server will also terminate if there is no task in one workflow though this flow’s time slice hasn’t been used up -More complicated than Round Robin -Choose a task with the earliest finish time to transmit -Still a approximation to GPS -When implementing, need a virtual clock and a table to track the status of each flow

10
Related Works J.A. Stankovic(Univ. of Vriginia): - Feedback control in task scheduling/WebServer - They introduce the idea of PID control into EDF Tarek Ablelzaher(UIUC): - Control of resource scheduling in complicated (MIMO) system. - Introduce control theory to software and web system Parameswaran Ramanathan(UW-Madison): - Overload management - He mainly proposed a technique for management of processor overloaded in real-time control applications.
: - Feedback control in task scheduling/WebServer - They introduce the idea of PID control into EDF Tarek Ablelzaher(UIUC): - Control of resource scheduling in complicated (MIMO) system. - Introduce control theory to software and web system Parameswaran Ramanathan(UW-Madison): - Overload management - He mainly proposed a technique for management of processor overloaded in real-time control applications..")
11
Algorithms—Control Method Flow Chart:

12
Algorithms—Control Method Utilization Calculation:

13
Algorithms—Control Method Flow Chart:

14
Algorithms—Control Method Reference Values(Expected Util): If a queue is empty, it will give its band width to other non-empty queues. Errors:

15
Algorithms—Control Method Controller: W(n)
")
16
Implementation Three programs One application

17
Experiments & Analysis Weighted Round RobinWF 2 Q Control Method Weight Setting Workflow1: 0.1 Workflow2: 0.2 Workflow3: 0.3 Workflow4: 0.4

18
Experiments & Analysis AlgorithmFlow 1Flow 2Flow 3Flow 4 Ideal0.10.20.30.4 Weighted Round Robin0.010160.19800.29930.4011 WF 2 Q0.100050.197120.299890.40193 Control Method0.100100.200600.300300.39940 Utilization Comparison

19
Experiments & Analysis Weighted Round RobinWF 2 Q Control Method Weight Setting Workflow1: 0.1 Workflow2: 0.2 Workflow3: 0.3 Workflow4: 0.4

20
Experiments & Analysis AlgorithmFlow 1Flow 2Flow 3Flow 4 Weighted Round Robin33.9428.5930.2425.16 WF 2 Q39.6617.1010.327.30 Control Method40.1216.6010.117.37 Average Response Time Comparison

21
Experiments & Analysis AlgorithmAverage Response Time Variance of Response Time Utilization Error Weighted Round Robin29.56711.950.00396 WF 2 Q19.1712760.00497 Control Method19.1712130.00016 Response Time Comparison

22
Experiments & Analysis AlgorithmFloat point computation number Branch number Parameter size Weighted Round Robin12 * flow number53 * flow number + 2 WF 2 Q14 * flow number83 * flow number + 2 Control Method16 * flow number65 * flow number + 2 Complexity

23
Future work We didn’t research in deep to see how PID parameters will influence the performance Find better problems to be solved by PID control

24
Summary We proposed a new method to implement GPS: Based on the idea of PID control Make schedule decision according to the error between the real utilization and expected utilization We did some literature research on related topics: GPS Control theory in RTS

25
Summary Compared with two other algorithms by writing three programs and one application Did some analysis and experiments on control method and two classical methods.

26
Questions If you are interested in our work, you are very welcomed to discuss with us or read our report.

Similar presentations







 Ion Stoica April 8/10, 2002.>")
 Is work conserving Is a fluid model Service Guarantee –GPS discipline can provide an end-to-end bounded- delay service.>")












