Download presentation
Presentation is loading. Please wait.

1
ECE 477 DESIGN REVIEW TEAM 7 SPRING 2013 COST ROBOT CAROLINE TRIPPEL, ANDREW LOVELESS, ERIC OSBORNE, BRYAN DALLAS

2
Outline Project overview Project-specific success criteria Block diagram Component selection rationale Packaging design Schematic and theory of operation PCB layout Software design / development status Project completion timeline Questions / discussion

3
Project Overview Design and build a compact robot to traverse a maze Use the robot to generate an ASCII representation of the entire maze Mark light locations on map as they are discovered Revisit lights intelligently throughout the maze in a user-defined order

4
Project-Specific Success Criteria An ability to detect proximity to maze walls and prevent wall collisions. An ability to find specific locations in the maze based on the placement of colored lights. An ability to turn and change direction of movement. An ability to generate an ASCII representation of the explored maze. An ability to transfer stored ASCII map to a GUI program on a desktop computer via USB.

5
Block Diagram

6
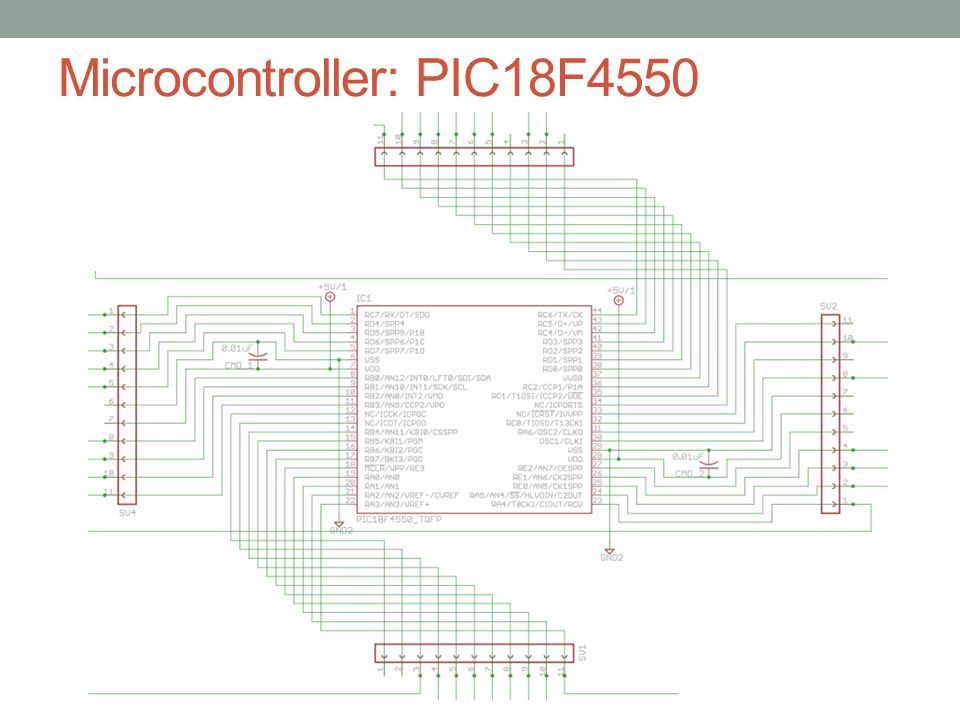
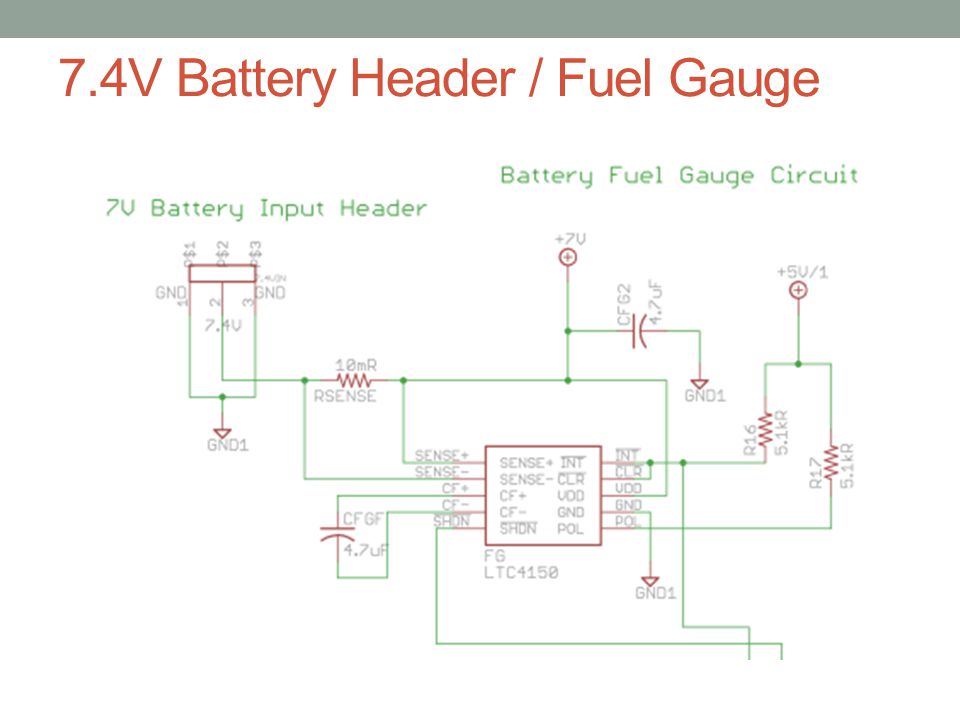
Component Selection Rationale Microcontroller: Microchip PIC18F4550 Memory Size: 2048 Bytes RAM 13 10-bit ADC Channels 2 PWM I2C USB 44 pins Fuel Gauge: Linear LTC4150 Simple setup, small circuit, easy monitoring

7
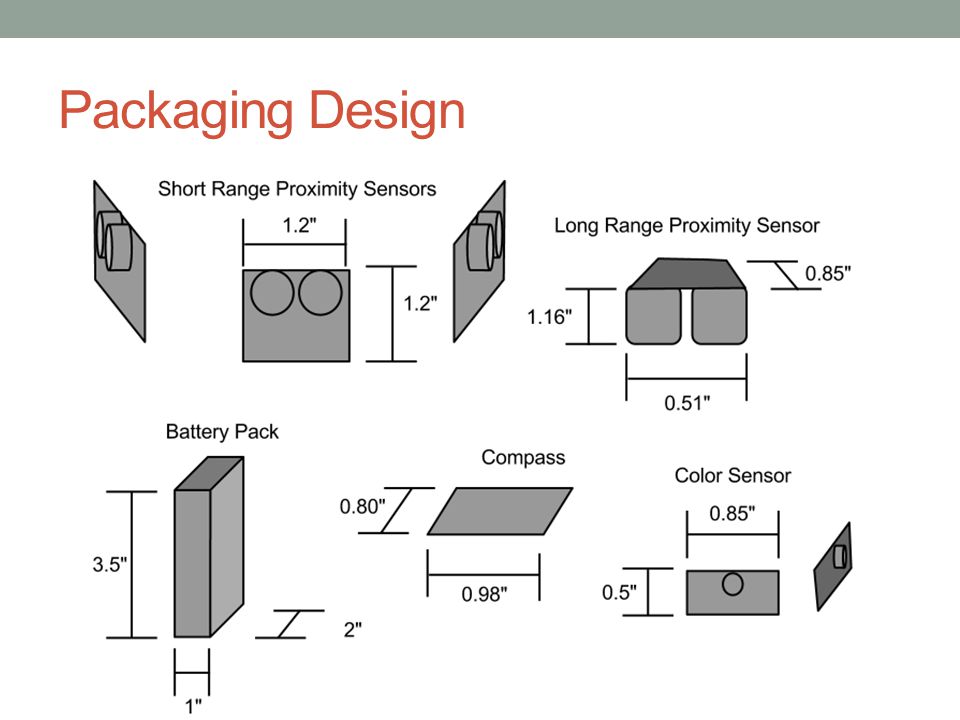
Component Selection Rationale Digital Compass: Honeywell HMC6352 I2C, easy setup, simple communication Short Range Sensor: Phigets 1103_1 Range: 0-100 mm (0-3.94 in) Long Range Sensor: Sharp GP2Y0A02YK0F Range: 20 – 150 cm (7.87 – 59 in) Color Light Sensor: Avago HDJD-S822-QR999 3 analog input for RGB, easy use
 Long Range Sensor: Sharp GP2Y0A02YK0F Range: 20 – 150 cm (7.87 – 59 in) Color Light Sensor: Avago HDJD-S822-QR999 3 analog input for RGB, easy use")
8
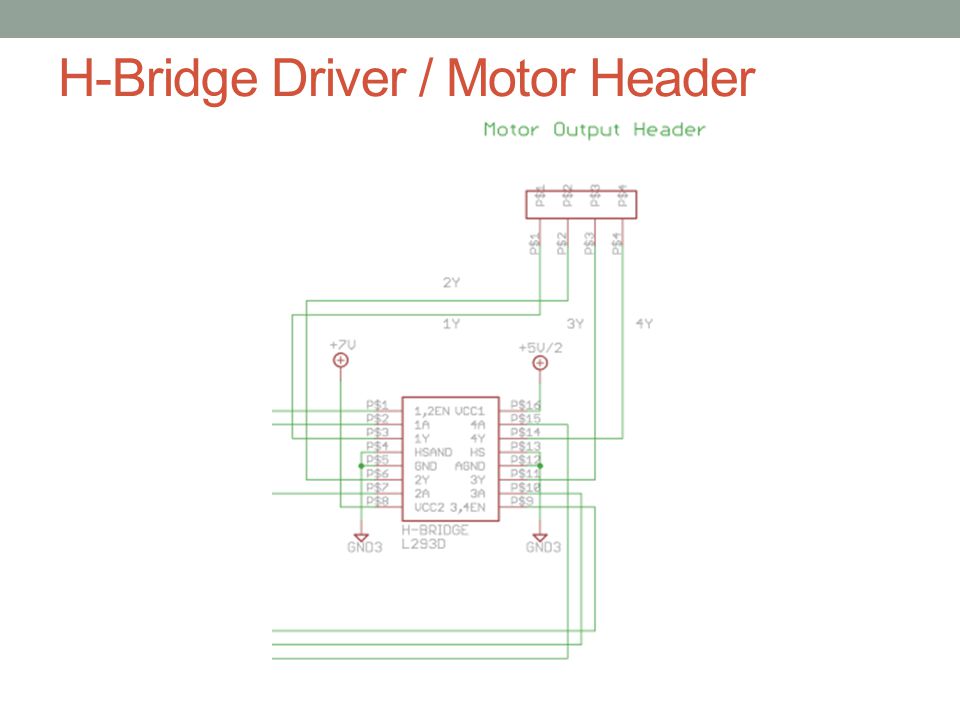
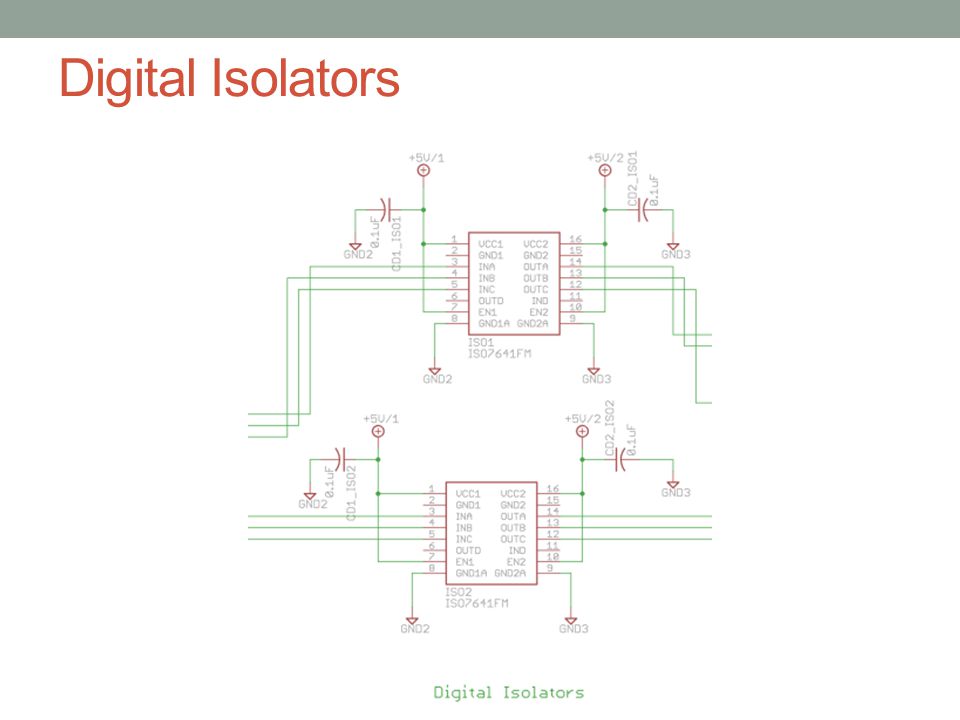
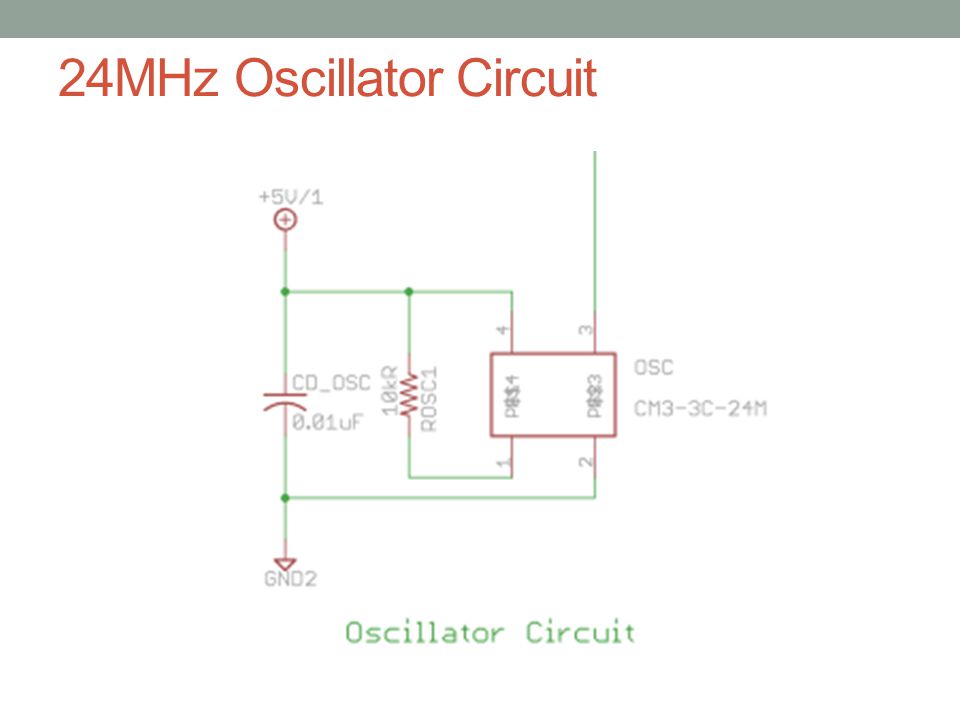
Component Selection Rationale H-Bridge: Texas Instruments L293DNE Built in diodes for noise suppression Geared Motor: Solarbotics GM3 Small, provides enough power to push our robot without stalling Digital Isolators Protects microcontroller from high motor voltage 24MHz Oscillator Required for USB communication

9
Packaging Design Three tiered octagon-shaped body: Tier 1 PCB, peripheral headers Compass Tier 2 3X short range proximity sensors 1X RGB color sensor Tier 3 1X Long range IR sensor 2X DC Motors / Wheels 1X 7.4V, 2 cell, Lithium-Ion Battery

10
Packaging Design

12
Schematic

13
Microcontroller: PIC18F4550

15
USB Connector

16
7.4V Battery Header / Fuel Gauge

18
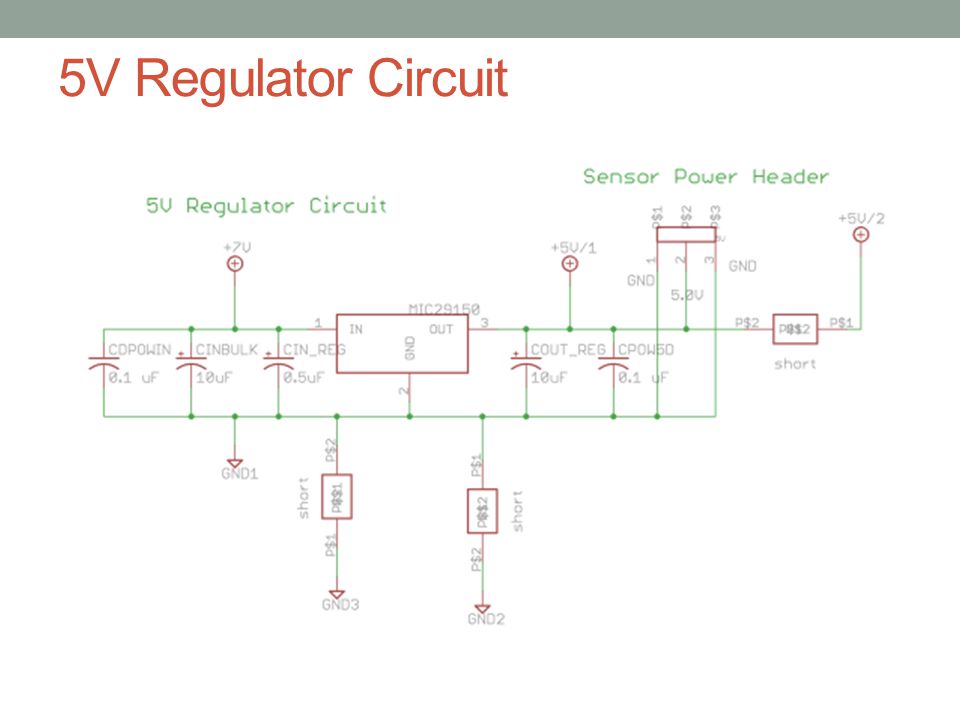
5V Regulator Circuit

20
H-Bridge Driver / Motor Header

22
Digital Isolators

24
I2C Compass Header

25
Indicator/Status LEDs

26
Pushbuttons

27
A/D Sensor Input Header

28
24MHz Oscillator Circuit

30
Programming/USART Headers

31
PCB Layout

32
PCB Layout: Top Copper

33
PCB Layout: Bottom Copper

34
PCB Layout: 7.4V Power / Ground = Ground = 7.4V

35
PCB Layout: 5V Ground

36
PCB Layout: 5V Power

37
Microcontroller / Headers

38
Motor Driver Subsystem

39
Power Subsystem

40
Oscillator Circuit

41
Pushbuttons

42
Sensor Header

43
Reset / Programming / Compass Header

44
Status/Indicator LEDs

45
Software Design Completed USART for printing/debugging PWM frequency/duty cycle control Timing modules / interrupts A/D conversion Bidirectional USB communication Started I2C, compass communication Modified Tremaux Algorithm for maze traversal

46
Project Completion Timeline TaskWeek 8 9 10 11 12 13 14 15 16 Base routines tested with peripheral hardware XX Robot base / motor construction XX Power prototyping / motion control XXXX PCB population / testingXXX Robot constructionXXXXX Robot maze codeXXX USB/Maze display program code XX Final packaging / constructionXX

47
QUESTIONS / DISCUSSION

Similar presentations









 Ryan Sato (Hardware) KiWoon Ahn (Recorder) Alan Do (Programmer)>")









