Download presentation
Presentation is loading. Please wait.

1
Differential Equations and Boundary Value Problems

2
Ordinary Differential Equations
To solve an RL circuit, we apply KVL around the loop and obtain a differential equation: Differential Equation has an independent variable i and the derivative of the independent variable. i- dependent variable t- independent variable

3
Ordinary vs. Partial Differential Equations
ordinary differential equation (or ODE) has one independent variable. A partial differential equation (or PDE) involves two or more independent variables. Differential equations are also classified as to their order. A first order equation includes a first derivative as its highest derivative. A second order equation includes a second derivative. Higher order equations can be reduced to a system of first order equations, by redefining a variable.
 has one independent variable. A partial differential equation (or PDE) involves two or more independent variables. Differential equations are also classified as to their order. A first order equation includes a first derivative as its highest derivative. A second order equation includes a second derivative. Higher order equations can be reduced to a system of first order equations, by redefining a variable.")
4
Engineering Problem Solution
Physical Laws (Faraday’s, Ohm’s, KVL) -> Differential Equation -> Numerical or Analytical Solution
 -> Differential Equation -> Numerical or Analytical Solution.")
5
Figure PT7_03.jpg

6
Figure PT7_04.jpg

7
Runga-Kutta Methods solving ordinary differential equations of the form

8
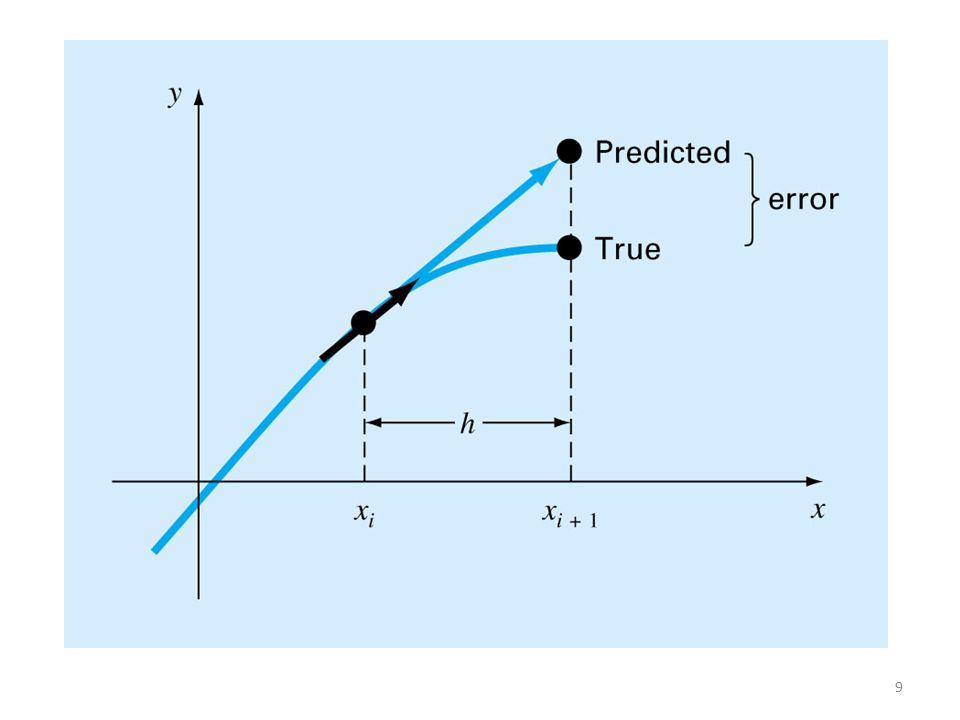
Euler’s Method The first derivative
provides a direct estimate of the slope at xi where f(xi,yi) is the differential equation evaluated at xi and yi. This estimate can be substituted into the equation: A new value of y is predicted using the slope to extrapolate linearly over the step size h.
 is the differential equation evaluated at xi and yi. This estimate can be substituted into the equation: A new value of y is predicted using the slope to extrapolate linearly over the step size h.")
10
Figure 25.3

11
Figure 25.4

12
Heun’s Method/ One method to improve the estimate of the slope involves the determination of two derivatives for the interval: At the initial point At the end point The two derivatives are then averaged to obtain an improved estimate of the slope for the entire interval.

14
The Midpoint (or Improved Polygon) Method/
Uses Euler’s method t predict a value of y at the midpoint of the interval:

15
Figure 25.12

16
Once n is chosen, values of a’s, p’s, and q’s are evaluated by setting general equation equal to terms in a Taylor series expansion.

17
Values of a1, a2, p1, and q11 are evaluated by setting the second order equation to Taylor series expansion to the second order term. Three equations to evaluate four unknowns constants are derived. A value is assumed for one of the unknowns to solve for the other three.

18
Three of the most commonly used methods are:
Because we can choose an infinite number of values for a2, there are an infinite number of second-order RK methods. Every version would yield exactly the same results if the solution to ODE were quadratic, linear, or a constant. However, they yield different results if the solution is more complicated (typically the case). Three of the most commonly used methods are: Huen Method with a Single Corrector (a2=1/2) The Midpoint Method (a2=1) Raltson’s Method (a2=2/3)
. Three of the most commonly used methods are: Huen Method with a Single Corrector (a2=1/2) The Midpoint Method (a2=1) Raltson’s Method (a2=2/3)")
19
Figure 25.14

20
Boundary-Value and Eigenvalue Problems
An ODE is accompanied by auxiliary conditions. These conditions are used to evaluate the integral that result during the solution of the equation. An nth order equation requires n conditions. If all conditions are specified at the same value of the independent variable, then we have an initial-value problem. If the conditions are specified at different values of the independent variable, usually at extreme points or boundaries of a system, then we have a boundary-value problem.

21
Figure 27.1

22
General Methods for Boundary-value Problems
Figure 27.2

23
(Heat transfer coefficient)
Boundary Conditions Analytical Solution:

24
The Shooting Method/ Converts the boundary value problem to initial-value problem. A trial-and-error approach is then implemented to solve the initial value approach. For example, the 2nd order equation can be expressed as two first order ODEs: An initial value is guessed, say z(0)=10. The solution is then obtained by integrating the two 1st order ODEs simultaneously.
=10. The solution is then obtained by integrating the two 1st order ODEs simultaneously.")
25
Using a 4th order RK method with a step size of 2:
This differs from T(10)=200. Therefore a new guess is made, z(0)=20 and the computation is performed again. z(0)=20 T(10)= Since the two sets of points, (z, T)1 and (z, T)2, are linearly related, a linear interpolation formula is used to compute the value of z(0) as to determine the correct solution.
=200. Therefore a new guess is made, z(0)=20 and the computation is performed again. z(0)=20 T(10)= Since the two sets of points, (z, T)1 and (z, T)2, are linearly related, a linear interpolation formula is used to compute the value of z(0) as to determine the correct solution.")
26
Figure 27.3

27
Nonlinear Two-Point Problems.
For a nonlinear problem a better approach involves recasting it as a roots problem. Driving this new function, g(z0), to zero provides the solution.
, to zero provides the solution.")
28
Figure 27.4

29
Finite Differences Methods.
The most common alternatives to the shooting method. Finite differences are substituted for the derivatives in the original equation. Finite differences equation applies for each of the interior nodes. The first and last interior nodes, Ti-1 and Ti+1, respectively, are specified by the boundary conditions. Thus, a linear equation transformed into a set of simultaneous algebraic equations can be solved efficiently.

30
Eigenvalue Problems Special class of boundary-value problems that are common in engineering involving vibrations, elasticity, and other oscillating systems. Eigenvalue problems are of the general form:

31
l is the unknown parameter called the eigenvalue or characteristic value.
A solution {X} for such a system is referred to as an eigenvector. The determinant of the matrix [[A]-l[I]] must equal to zero for nontrivial solutions to be possible. Expanding the determinant yields a polynomial in l. The roots of this polynomial are the solutions to the eigen values.

Similar presentations



 Lecture 28-36 KFUPM Read 25.1-25.4, 26-2, 27-1 CISE301_Topic8L8&9 KFUPM.>")




 1 1 Besides the main textbook, also see Ref.: “Applied.>")











