Download presentation
Presentation is loading. Please wait.

1
SPECIAL MECHANIES

2
Converts electrical energy into kinetic energy
Motor Basics What is a motor Converts electrical energy into kinetic energy Where did it come from Identification of rotating magnetic field principle by Nicola Tesla in 1882 Introduction of Electric Motor by Nicola Tesla in December 1889 (U.S. Patent )
")
3
How It Works When electric current passes through a coil in a magnetic field, the magnetic force produces a torque which turns the motor. Force in Motor: F=ILB F = Force B = Magnetic Field L = Length of Conductor I = Current in Conductor Torque in Motor: T = IBA sin θ A = LW L = Length of Winding W = Width of Winding

4
Ac series motor

5
Ac series motor Application to mixer

6
Repulsion motor A repulsion motor is a type of electric motor for use on alternating current (AC). It was formerly used as a traction motor for electric trains but has been superseded by other types of motors and is now only of historical interest. Repulsion motors are classified under single phase motors. In repulsion motors the stator windings are connected directly to the AC power supply and the rotor is connected to a commutator and brush assembly, similar to that of a direct current (DC) motor.[
. It was formerly used as a traction motor for electric trains but has been superseded by other types of motors and is now only of historical interest. Repulsion motors are classified under single phase motors. In repulsion motors the stator windings are connected directly to the AC power supply and the rotor is connected to a commutator and brush assembly, similar to that of a direct current (DC) motor.[")
7
Construction The motor has a stator and a rotor but there is no electrical connection between the two and the rotor current is generated by induction. The rotor winding is connected to a commutator which is in contact with a pair of short-circuited brushes which can be moved to change their angular position relative to an imaginary line drawn through the axis of the stator. The motor can be started, stopped and reversed, and the speed can be varied, simply by changing the angular position of the brushes.

8
Stop positions Run positions Idle Run positions Position for clockwise operation Position for counter-clockwise operation

9
RELUCTANCE MOTOR

11
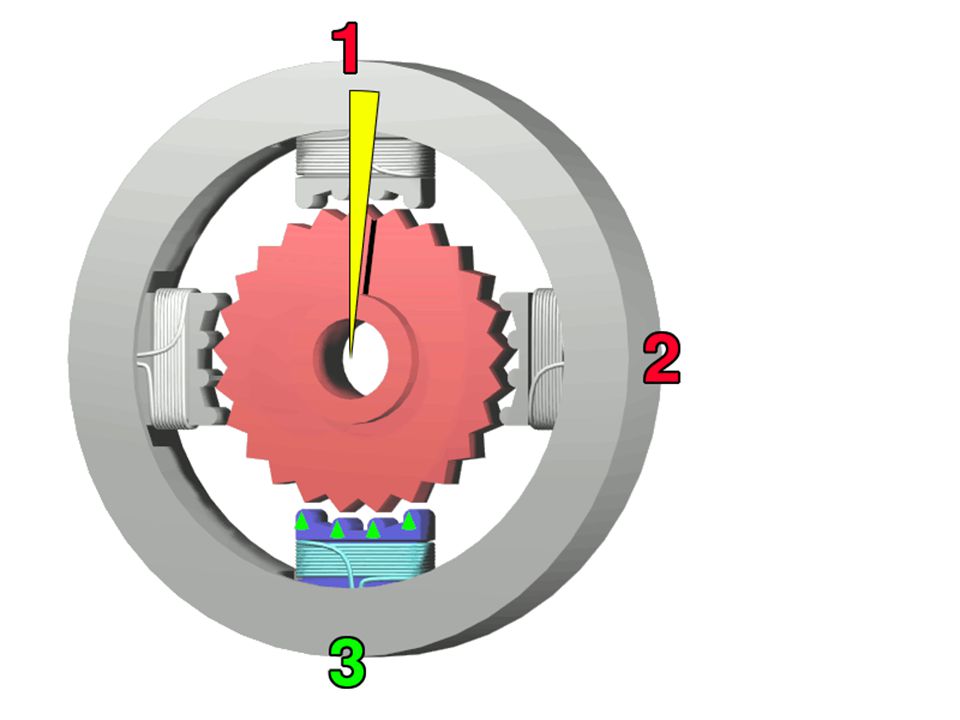
CROSS SECDTIONAL VIEW OF RELUCTANCE MOTOR
Cross-section of reluctance machine with 6 stator and 4 rotor poles. Notice the concentrated windings on the stator poles.

12
A reluctance motor is a type of electric motor that induces non-permanent magnetic poles on the ferromagnetic rotor. Torque is generated through the phenomenon of magnetic reluctance. There are various types of reluctance motor: Synchronous reluctance motor Variable reluctance motor Switched reluctance motor Variable reluctance stepping motor

13
Hysteresis Motors Stator Rotor same as for induction motor
Smooth cylinder

14
Principle of Operation
Stator Flux establishes these magnetic poles Rotor poles “induced” by Stator Flux

15
Spin the stator poles with the rotor blocked
Rotor poles follow the rotating flux, but lag behind by angle δh Stator poles moving CCW

16
Spin the stator poles with the rotor blocked
If the rotor is released, it will accelerate to synchronous speed

17
Mechanical Power developed

18
Mechanical Power developed

19
Mechanical Power Developed (cont)
Independent of frequency and speed!

20
Hysteresis Motor at Synchronous Speed
No load and negligible rotational losses Induced rotor magnets remain locked with the rotating poles produced by the stator

21
Hysteresis Motor at Synchronous Speed
The rotor slows down and the induced rotor magnets lag the rotating poles of the stator by an angle δmag . The rotor returns to synchronous speed at the new torque angle. Apply a step increase in shaft load.

22
Hysteresis Motor at Synchronous Speed
If shaft load causes δmag>90°, the rotor pulls out if synchronism, the magnet torque drops to zero, and the machine develops hysteresis torque. This torque is not sufficient to carry the load.

23
Torque-Speed Characteristic
Constant Hysteresis Torque allows the motor to synchronize any load it can accelerate “Normal” Operating Range

24
STEPPER MOTOR J. Belwin Edward Assistant Professor Senior
School of Electrical Engineering VIT University Vellore

25
Stepper motor characteristics
Stepper motors are constant power devices. As motor speed increases, torque decreases. Most motors exhibit maximum torque when stationary, however the torque of a motor when stationary (holding torque) defines the ability of the motor to maintain a desired position while under external load. The torque curve may be extended by using current limiting drivers and increasing the driving voltage (sometimes referred to as a 'chopper' circuit; there are several off the shelf driver chips capable of doing this in a simple manner). Steppers exhibit more vibration than other motor types, as the discrete step tends to snap the rotor from one position to another (called a detent). The vibration makes stepper motors noisier than DC motors. This vibration can become very bad at some speeds and can cause the motor to lose torque or lose direction. This is because the rotor is being held in a magnetic field which behaves like a spring. On each step the rotor overshoots and bounces back and forth, "ringing" at its resonant frequency. If the stepping frequency matches the resonant frequency then the ringing increases and the motor loses synchronism, resulting in positional error or a change in direction. At worst there is a total loss of control and holding torque so the motor is easily overcome by the load and spins almost freely. The effect can be mitigated by accelerating quickly through the problem speeds range, physically damping (frictional damping) the system, or using a micro-stepping driver. Motors with a greater number of phases also exhibit smoother operation than those with fewer phases (this can also be achieved through the use of a micro-stepping driver). Stepper motors with higher inductance coils provide greater torque at low speeds and lower torque at high speeds compared to stepper motors with lower inductance coils.
 defines the ability of the motor to maintain a desired position while under external load. The torque curve may be extended by using current limiting drivers and increasing the driving voltage (sometimes referred to as a chopper circuit; there are several off the shelf driver chips capable of doing this in a simple manner). Steppers exhibit more vibration than other motor types, as the discrete step tends to snap the rotor from one position to another (called a detent). The vibration makes stepper motors noisier than DC motors. This vibration can become very bad at some speeds and can cause the motor to lose torque or lose direction. This is because the rotor is being held in a magnetic field which behaves like a spring. On each step the rotor overshoots and bounces back and forth, ringing at its resonant frequency. If the stepping frequency matches the resonant frequency then the ringing increases and the motor loses synchronism, resulting in positional error or a change in direction. At worst there is a total loss of control and holding torque so the motor is easily overcome by the load and spins almost freely. The effect can be mitigated by accelerating quickly through the problem speeds range, physically damping (frictional damping) the system, or using a micro-stepping driver. Motors with a greater number of phases also exhibit smoother operation than those with fewer phases (this can also be achieved through the use of a micro-stepping driver). Stepper motors with higher inductance coils provide greater torque at low speeds and lower torque at high speeds compared to stepper motors with lower inductance coils.")
26
Switched reluctance motor

27
Stepper motor

28
Stepper motor

29
Applications Computer peripherals Textile industries IC fabrications
Robotics Applications requiring incremental motion Typewriters Line printers Tape drives Floppy disk drives Numerically-controlled machine tools Process control systems X-Y plotters

30
Applications contd…. Commercial, military and medical applications
Mixing, cutting, striking, metering, blending Application in manufacture of packed food stuffs Application in manufacturing of commercial end products Production of science fiction movies.

31
Step Angle - β As small as 0.78o to 90o
Most commonly used – 1.8o, 2.5o, 7.5o, 15o β = (Ns-Nr) x 360o = 360o Ns.Nr mNr Ns – No. of Stator poles (teeth) Nr – No. of Rotor poles (teeth) m - No. of stator phases
 x 360o = 360o. Ns.Nr mNr. Ns – No. of Stator poles (teeth) Nr – No. of Rotor poles (teeth) m - No. of stator phases.")
36
Types Variable Reluctance - VR Permanent Magnet - PM Hybrid

37
VR, PM and Hybrid types

38
Variable Reluctance ( VR) stepper motor
Wound Stator poles Single Stack Multiple Stack – smaller step angle Rotor poles – ferromagnetic material Direction – stator current polarity Reluctance of the magnetic circuit formed by rotor and stator teeth varies with angular position of the rotor

39
Variable Reluctance stepper motor
Single Stack

40
VR – Multi stack

41
VR-Operation

42
Modes of operation –VR type
1-phase ON – full step operation 2-phase ON Half-step – alternate 1-phase & 2-phase mode Micro stepping

43
Permanent Magnet (PM) Stepper Motor
 Stepper Motor")
44
Permanent Magnet stepper motor
Wound Stator poles Single Stack Multiple Stack – smaller step angle Rotor poles – permanent magnet Rotor Shape - Cylindrical Direction – stator current polarity

45
PM - operation

46
PM - operation

47
Modes of Operation – PM type
1-phase ON mode 2-phase ON mode Half step mode

48
Modes of Operation – PM type

49
Hybrid Stepper Motor

50
Hybrid stepper motor Combination of VR and PM
Wound Stator poles – (similar to VR) Single Stack Multiple Stack – smaller step angle Rotor poles – permanent magnet Rotor shape – not Cylindrical Direction – stator current polarity
 Single Stack. Multiple Stack – smaller step angle. Rotor poles – permanent magnet. Rotor shape – not Cylindrical. Direction – stator current polarity.")
51
Stepper motor applications
Automated Test Equipment Surveillance Systems Avionics Defense Contracting Labeling Machinery Medical Equipment Packaging Semiconductor Manufacturing Metering and Dispensing Engraving Machine Automatic Feeding Machine 3D Image Acquisition System Label and Die Feeder Wave Length Meter Bar Code Printing Antenna Fiber optics Switch Laser Measurement Press Printing Color/ Photo Imaging

Similar presentations





>")















 Gurunath Athalye.>")

