Download presentation
Presentation is loading. Please wait.

1
AAE 450 Spring 2008 Michael Walker January 17 th 2007 Dynamics and Controls Group Contact Control Methods Research, 1-d Corrections

2
AAE 450 Spring 2008 Considered Control Methods Thrust Vectoring –Gimbaled Thrust Requires structural system and control system to direct engine –LITVC: Liquid Injection Thrust Vector Control Equipment requirement for injection system, and injection liquid storage Spin Stabilization Upper stage stabilization done via spin to damp out the perturbing forces Control Surfaces –Thrust: Jet Vanes, Jetavors –Aerodynamic: Fins Any control surface also represents needed structural analysis Dynamics And Controls

3
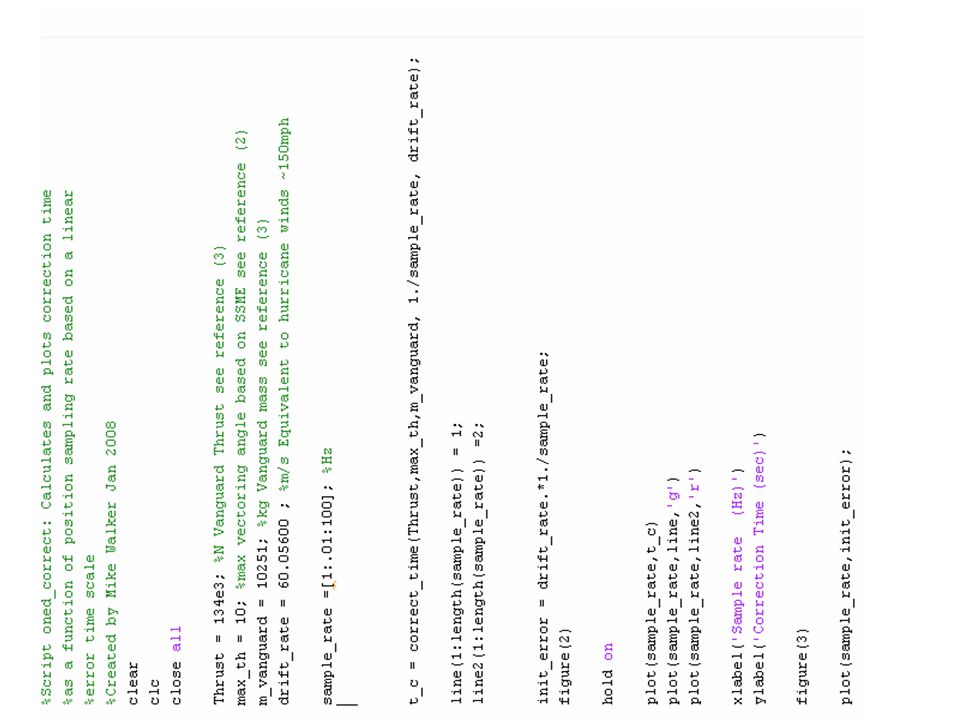
AAE 450 Spring 2008 Dynamics and Controls Future Work Pick a control method Develop method and control law for rigid body system Basic Correction by Linear Thrust Profile 1-d correction to horizontal point mass location based on sample rate. 30 Hz yields 1 sec correction time. for initial error of ~2.5 meters. Max Thrust Vectoring of 10º Figure 1.1: Correction Time as a function of Sample Rate. Created by Mike Walker

4
AAE 450 Spring 2008 References 1. Baxter, A. N, “THE APPLICATION OF JET-PUMPING TO LIQUID INJECTION THRUST VECTOR CONTROL” (Space Technology Labs. INC.) AIAA No 65-23. Dec 1964 2. National Aeronautics and Space Administration “Shuttle Orbiter Systems Manual - Main Propulsion System” Pgs 24-25 (http://www.shuttlepresskit.com/scom/216.pdf) 3. Klaurans, B. “The Vanguard Satellite Launching Vehicle” The Martin Company. No. 11022 April 1964 Dynamics and Controls
 AIAA No Dec National Aeronautics and Space Administration Shuttle Orbiter Systems Manual - Main Propulsion System Pgs ( 3. Klaurans, B. The Vanguard Satellite Launching Vehicle The Martin Company. No April 1964 Dynamics and Controls.")
5
Free body diagram Figure 1.2: Free Body diagram

6
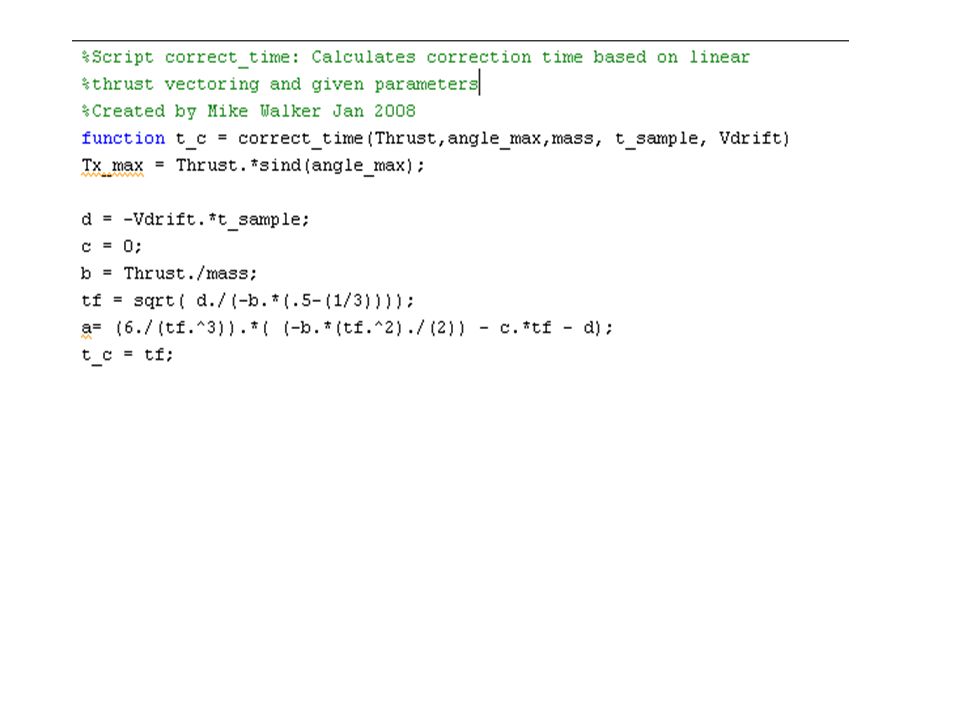
Model For 1-d Correction Solve System of Equations to get correction time

7
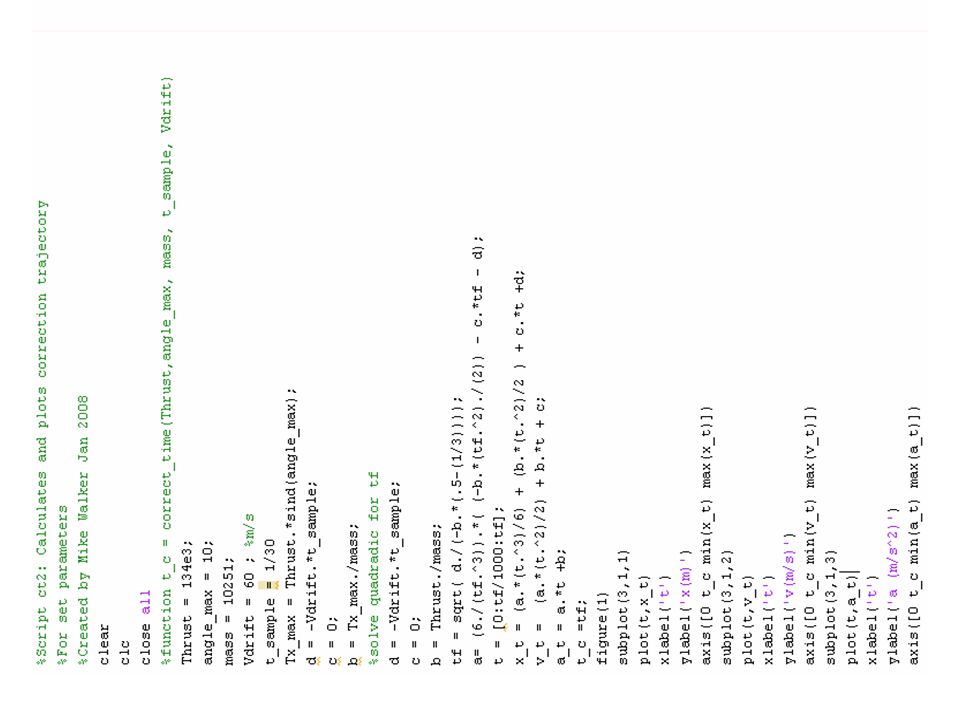
30 Hz example of 1-d Correction Figure 1.3: 1-d Correction x,v,a functions, Created by Mike Walker

Similar presentations



![AAE450 Spring 2009 Propellant Requirements Attitude Control Thrusters with Low Thrust Orbit Trajectories [Josh Lukasak] [Attitude Group Lead]](/15/4849018/big_thumb.jpg "AAE450 Spring 2009 Propellant Requirements Attitude Control Thrusters with Low Thrust Orbit Trajectories [Josh Lukasak] [Attitude Group Lead]>")
 : Chemical Propulsion System Refined estimates: OTV WET Mass, Propellant Volume & Propellant.>")














