Download presentation
Presentation is loading. Please wait.

1
GRADIENT PROJECTION FOR SPARSE RECONSTRUCTION: APPLICATION TO COMPRESSED SENSING AND OTHER INVERSE PROBLEMS M´ARIO A. T. FIGUEIREDO ROBERT D. NOWAK STEPHEN J. WRIGHT

2
BACKGROUND

3
PREVIOUS ALGORITHMS Interior-point method SparseLab: a Matlab software package designed to find sparse solutions to systems of linear equations L1_ls: a Matlab implementation of the interior-point method for L1-regularized least squares L1-MAGIC: a collection of MATLAB routines for solving the convex optimization programs central to compressive sampling

4
GRADIENT PROJECTION FOR SPARSE RECONSTRUCTION Formulation

5
GRADIENT DESCENT Gradient descent is a first-order optimization algorithm. To find a local minimum of a function using gradient descent, one takes steps proportional to the negative of the gradient (or of the approximate gradient) of the function at the current point.
 of the function at the current point..")
6
BASIC GRADIENT PROJECTION

7
GPSR-BASIC

8
GPSR-BB An approach due to Barzilai and Borwein (BB) that F may not decrease at every iteration. Standard non-monotone method: Eliminate the backtracking line search step Monotone method:

9
CONVERGENCE Theorem 1: The sequence of iterates {z (k) } generated by the either the GPSR-Basic of GPSR-BB algorithms either terminates at a solution or else converges to a solution of function below at an R-linear rate. T. Serafini, G. Zanghirati, L. Zanni. “Gradient projection methods for large quadratic programs and applications in training support vector machines,” Optimization Methods and Software, vol. 20, pp. 353–378, 2004.

10
TERMINATION Several termination criterions are presented while these options all perform well on all data sets. The one author used in this paper is motivated by perturbation results for linear complementarity problem (LCP).
..")
11
DEBIASING The function above is a bias solution for least-square problem. So we could fix the zero components, and use standard least square to get a debiasing solution. It is also worth pointing out that debiasing is not always desirable. Shrinking the selected coefficients can mitigate unusually large noise deviations, a desirable effect that may be undone by debiasing.

12
WARM STARTING AND CONTINUATION After solving the problem with a given τ, we could use the solution to initialize GPSR for a nearby value of τ. It has been noted recently that the speed of GPSR may degrade considerably for smaller values of the regularization parameter τ. However, if we use GPSR for a larger value of τ, then decrease τ in steps toward its desired value. To benefit from a warm start, IP methods require the initial point to be not only close to the solution but also sufficiently interior to the feasible set and close to a “central path,” which is difficult to satisfy in practice.

13
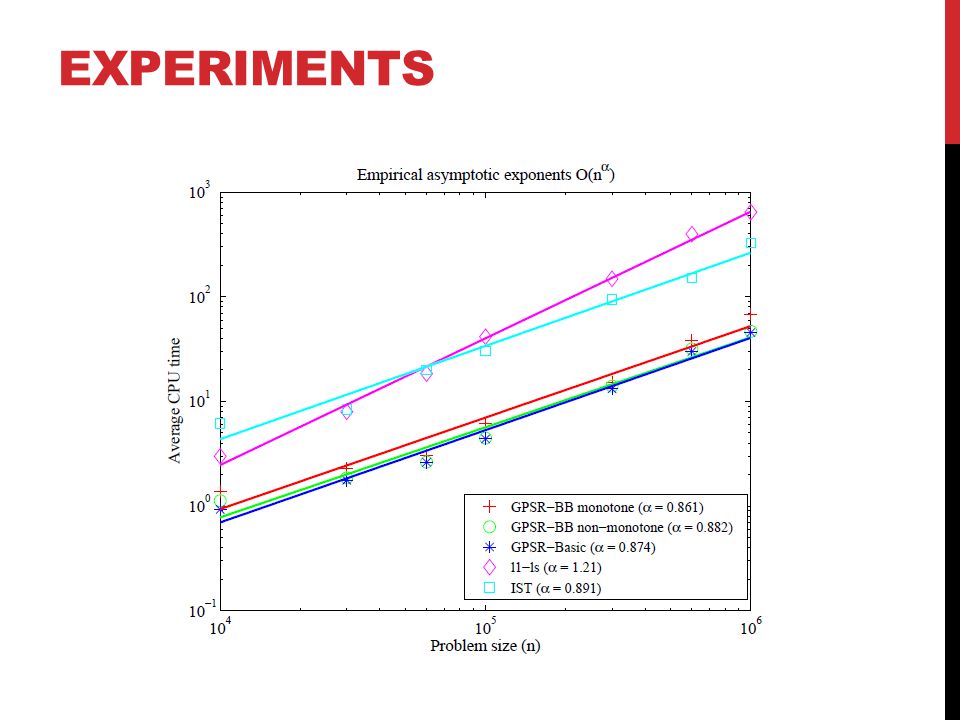
EXPERIMENTS

15
CONCLUSIONS Significantly faster than the state-of-the-art algorithms in experimental comparisons Poor performance when the regularization parameter τ is small, while continuation heuristic could be used to recover efficient practical performance While it is not obvious WHY GPSR perform well

Similar presentations







 Submitted by: Nitesh Agarwal IIT Roorkee.>")










 Slides are from RPI Registration Class.>")
