Download presentation
Presentation is loading. Please wait.

1
Grid Maps for Robot Mapping

2
Features versus Volumetric Maps

3
Features

4
Grid Map Representation

5
Grid Maps

6
Example of Grid Map inaccuracy

7
Assumption 1 for Grid Maps

8
Variables for Grid Map Representation

9
Occupancy Probability for cells in Grid Maps

10
Assumption 2 for cells in Grid Maps

11
Probability of cells occupancy in Grid Maps

12
Probability distribution in Grid Maps

13
Estimating a Map from Data

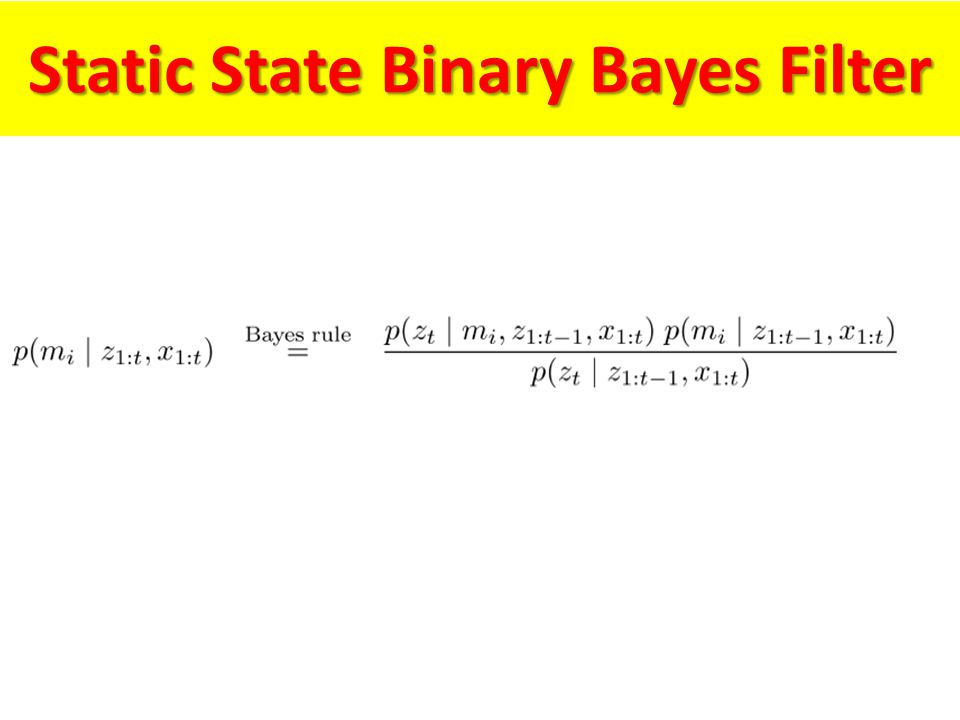
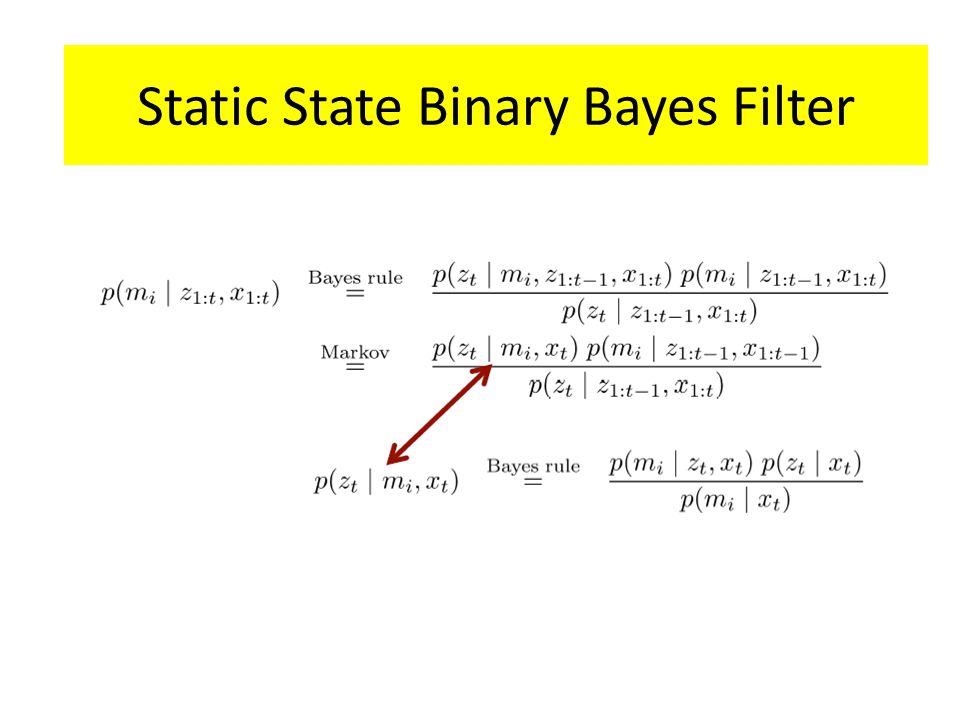
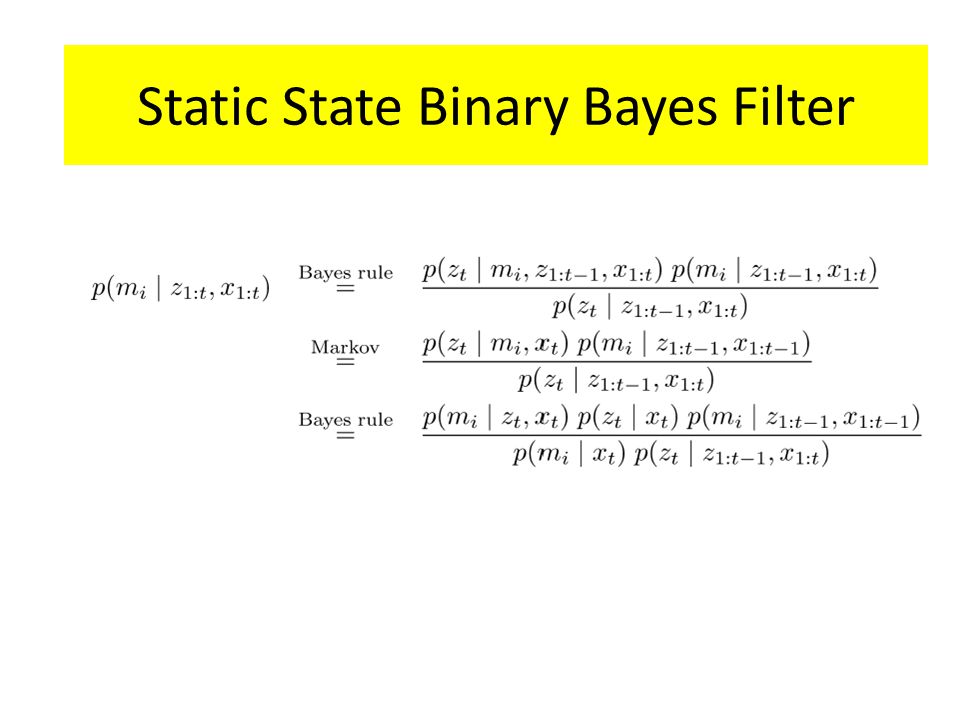
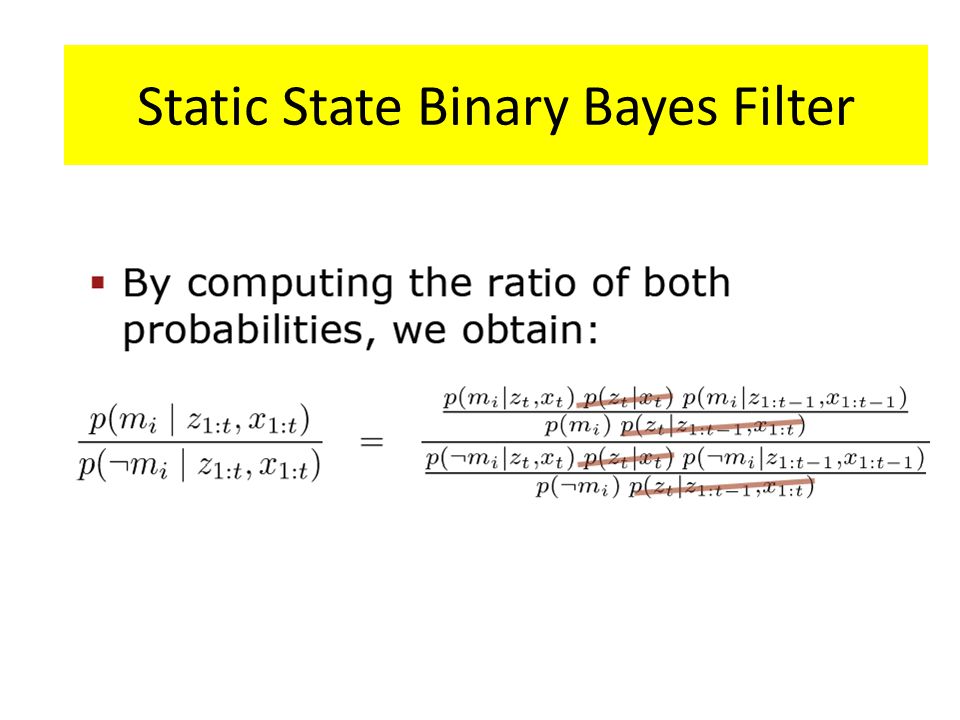
14
Static State Binary Bayes Filter

24
Log Odds Notation

25
Occupancy Mapping in Log Odds Form

26
Occupancy Mapping Algorithm

27
Occupancy Grid Mapping

28
Inverse Sensor Model for Sonars Range Sensors

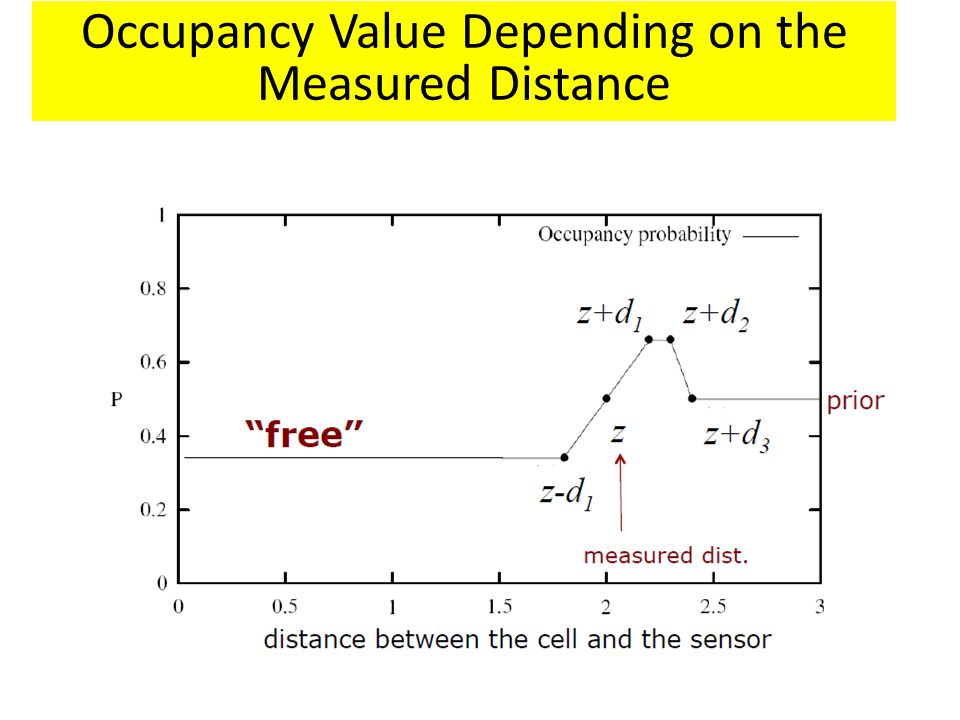
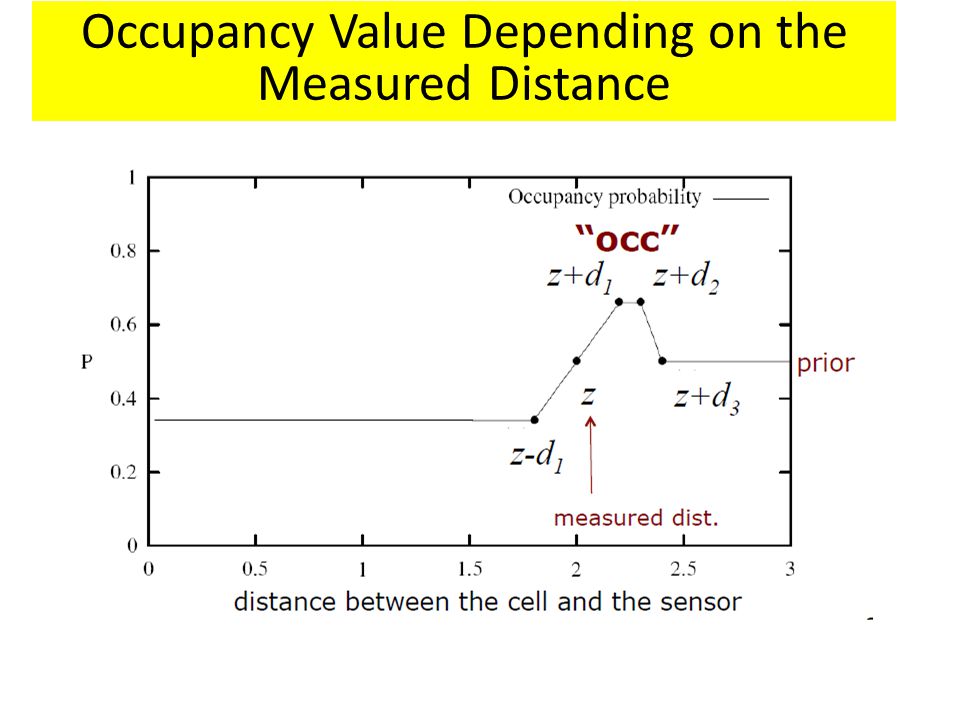
29
Occupancy Value Depending on the Measured Distance

33
Examples of Occupancy Grids

34
Example: Incremental Updating of Occupancy Grids

35
Resulting Map Obtained with Ultrasound Sensors

36
Resulting Occupancy and Maximum Likelihood Map

37
Inverse Sensor Model for Laser Range Finders

38
Occupancy Grids from Laser Scans to Maps

39
Example: MIT CSAIL 3 rd Floor

40
Uni Freiburg Building 106

41
Summary

Similar presentations









 Lecture 15 Randomized Incremental.>")
















