Download presentation
Presentation is loading. Please wait.

1
CSE 242A Integrated Circuit Layout Automation Lecture: Floorplanning Winter 2009 Chung-Kuan Cheng

2
Outlines Introduction Representations and Approaches Constraint Graph Triangulation Tutte’s Duality Slicing Flooplanning Nonslicing... Block Handling Research Directions

3
Introduction Input A set of blocks with constraints on area, shapes, relative positions, Constraints on chip area and aspect ratio, Netlist. Output Shapes, Locations, Pin positions of the blocks Objective Functions Performance, chip area, and wire length

4
Representations Constraint Graph Theorem: A V or H constraint graph is planar and acyclic.

5
Constraint Graph Generation # Edges O(n 2 ), O(n)
, O(n)")
6
Constraint Graph Generation Scan from left to right at cur_x; Update scaline: list of blocks crossing scanline. For blocks T strating at cur_x; Insert T into scanline list …R->T->S … Generate edges R->T and T->S End

7
Constraint Graph Generation 2 Scan from left to right at cur_x; Update scanline: list of blocks crossing scanline. For blocks T starting at cur_x; Insert T into scanline list: …R->T->S … Generate list:T.top=R, R.bot=T, T.bot=S, S.top=T End For block T ending at cur_x; if T.top is list in scanline, generate edge T.top->T; if T.bot is list in scanline, generate edge T->T.bot End

8
Floorplan Triangulation Floorplan with zero dead space Floorplan with dead space

9
Triangulation For floorplan with zero dead space, H & V constraint graphs are dual. H & V Every face is a triangle All internal nodes have a degree >= 4 All cycles that are not faces have length >= 4

10
Triangulation 2 Node oriented vs edge oriented constraint graph a b c e d f g 1 8 2 3 4 5 67 10

11
Tutte’s Duality s c d t b a a b t d c s

12
Slicing Floorplan & General Flow V H V H H 2 1 5 436 Nonslicing

13
Routing Region Definition & Ordering Straight Channel L Shaped a 1 2 b 3 c a 2 1 b c Non-Feasible Order Feasible Order

14
Polish Expression 1 3 4 25 7 6 v H H V V H 2 15 7 436 2 1 H 5 7 V 4 3 H 6 V H V

15
Given n components, there are n-1 operators Polish Exp has 2n-1 length Polish Exp is legal iff # operators <= # comps – 1 For any prefix substring 2 1 H5 7 V 4 3 H 6 V H V 2 1 5 H 7 V 4 3 H 6 V H V 2 1 5 H V H V 7 4 3 6 H V

16
Redundancy of Polish Exp 12 3 V V 1 23 V V 23 1 1 2 V 3 V 1 2 3 V V No consecutive operators of the same type

17
Neighborhood Structure OP. Chain: VHVHV… or HVHV… 2 3 V 1 4 H 5 V 6 H V V M1: Swap adjacent components M2: Complement a chain M3: Move an operator under the prefix constraint of “# operators <= # comps – 1”

18
5 3 12 4 5 4 12 3 35 4 12 3 4 5 12 4 5 3 12 4 5 3 2 1 2 1 35 4 1 2 V 3 H4 V 5 H 1 2 V 4 H 3 V 5 H 1 2 V 4 H 3 5 V H 1 2 V 4 3 H 5 V H 1 2 V 4 3 5 H V H 1 2 H 4 3 5 H V H 1 2 H 4 3 5 V H V

19
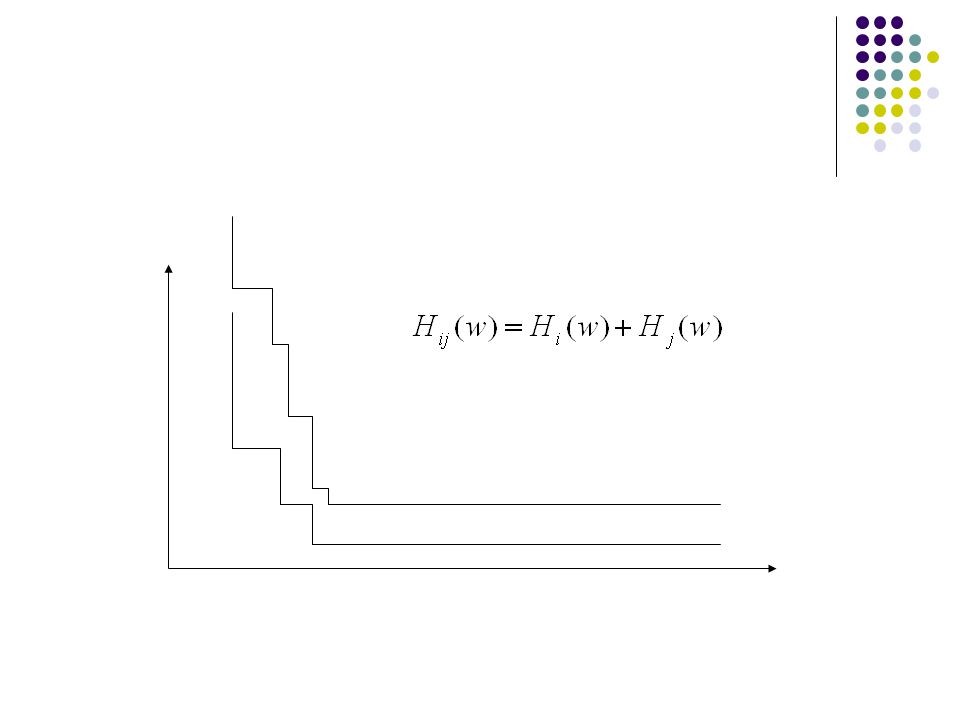
The choices of macro cell 3 2 1 4 H V H 2341 HiHj

21
Hierarchy Floorplan K=2 K=3 K=4

22
ab c d e a1 a2 a3 a4 a5 a6 a11 a12 a13 a14 b1b2 b3 b4b5

23
Sequence Pair a b b a a b ba Eg. c a e b d a b c d e e c abd #combinations

24
Grid System Interpretation 5 4 3 2 1 12345 c e a b d x ar lb

25
Perturbation: move a component to another room Bounded-Sliceline Grid

26
BSG Adjacency Graphs Theorem: n x n grid contains the complete solution space for n components

27
Twin Binary Trees Definition of Twin Binary Trees Transformations between Floorplan and Twin Binary Trees

28
Twin Binary Trees T T T T 0 90 0 180 0 270 0 C + -neighbor: 0 0 T-junction, block on right 270 0 T-junction, block on top C - -neighbor: 90 0 T-junction, block on top 180 0 T-junction, block on left A B0 A B 270 0 A B 90 0 A B 180 0

29
A B C D E F C B A E D F X 1 1 0 0 1 X X X 0 1 0 1 0 F A D B C E Twin Binary Trees ( 1 )=11001 ( 2 )=00110 order( 1 )=order( 2 )=ABCDFE
=11001 ( 2 )=00110 order( 1 )=order( 2 )=ABCDFE")
30
Twin Binary Trees and Mosaic Floorplan Twin Binary Tree Mosaic Floorplan : one to one mapping Transformation between twin binary trees and mosaic floorplan takes linear complexity #twin binary trees = Baxter number

31
Corner Block List Corner Block List Mosaic Floorplan A permutation and two 0-1 lists e.g. S=(fcegbad), L=(001100), T=(001010010)
, L=(001100), T=( ).")
32
Corner Block List S=(fcegbad), L=(001100), T=(001010010) S is the reversed sequence of removed blocks L[i] is the removing direction of block i Number of ‘0’s before ith ‘1’ in T is the number of blocks covered by S[i] when it is removed
![Corner Block List S=(fcegbad), L=(001100), T=( ) S is the reversed sequence of removed blocks L[i] is the removing direction of block i Number of ‘0’s before ith ‘1’ in T is the number of blocks covered by S[i] when it is removed](http://images.slideplayer.com/16/5241405/slides/slide_32.jpg "Corner Block List S=(fcegbad), L=(001100), T=( ) S is the reversed sequence of removed blocks L[i] is the removing direction of block i Number of ‘0’s before ith ‘1’ in T is the number of blocks covered by S[i] when it is removed")
33
Corner Block List Redundancy (L and T are not independent) Solution space size O(n!2 3n-3 /n 1.5 ) Can be reduced to O(n!2 3n-3 /n 4 ), no redundancy
 Solution space size O(n!2 3n-3 /n 1.5 ) Can be reduced to O(n!2 3n-3 /n 4 ), no redundancy")
34
Floorplan Optimization Flow Simulated annealing (SA) in the representation solution space s := s0; e := E(s) // Initial state, energy. sb := s; eb := e // Initial "best" solution k := 0 // Energy evaluation count. while k emax // While time remains & not good enough: sn := neighbour(s) // Pick some neighbour. en := E(sn) // Compute its energy. if en < eb then // Is this a new best? sb := sn; eb := en // Yes, save it. if P(e, en, temp(k/kmax)) > random() then // Should we move to it? s := sn; e := en // Yes, change state. k := k + 1 // One more evaluation done return sb // Return the E() is the objective function neighbour(s) comes from perturbation on s
 // Pick some neighbour. en := E(sn) // Compute its energy. if en < eb then // Is this a new best. sb := sn; eb := en // Yes, save it. if P(e, en, temp(k/kmax)) > random() then // Should we move to it. s := sn; e := en // Yes, change state. k := k + 1 // One more evaluation done return sb // Return the E() is the objective function neighbour(s) comes from perturbation on s.")
Similar presentations









![1 Representing Graphs. 2 Adjacency Matrix Suppose we have a graph G with n nodes. The adjacency matrix is the n x n matrix A=[a ij ] with: a ij = 1 if.](/15/4821664/big_thumb.jpg "1 Representing Graphs. 2 Adjacency Matrix Suppose we have a graph G with n nodes. The adjacency matrix is the n x n matrix A=[a ij ] with: a ij = 1 if.>")









