Download presentation
Presentation is loading. Please wait.

1
Modern methods The classical approach: MethodProsCons Time series regression Easy to implement Fairly easy to interpret Covariates may be added (normalization) Inference is possible (though sometimes questionable) Static Normal-based inference not generally reliable Cyclic component hard to estimate Decomposition Easy to interpret Possible to have dynamic seasonal effects Cyclic components can be estimated Descriptive (no inference per def) Static in trend
 Inference is possible (though sometimes questionable) Static Normal-based inference not generally reliable Cyclic component hard to estimate Decomposition Easy to interpret Possible to have dynamic seasonal effects Cyclic components can be estimated Descriptive (no inference per def) Static in trend")
2
Explanation to the static behaviour: The classical approach assumes all components except the irregular ones (i.e. t and IR t ) to be deterministic, i.e. fixed functions or constants To overcome this problem, all components should be allowed to be stochastic, i.e. be random variates. A time series y t should from a statistical point of view be treated as a stochastic process. We will interchangeably use the terms time series and process depending on the situation.
 to be deterministic, i.e. fixed functions or constants To overcome this problem, all components should be allowed to be stochastic, i.e. be random variates. A time series y t should from a statistical point of view be treated as a stochastic process. We will interchangeably use the terms time series and process depending on the situation..")
3
Stationary and non-stationary time series Characteristics for a stationary time series: Constant mean Constant variance A time series with trend is non-stationary!

4
Auto Regressive, Integrated, Moving Average Box-Jenkins models A stationary times series can be modelled on basis of the serial correlations in it. A non-stationary time series can be transformed into a stationary time series, modelled and back-transformed to original scale (e.g. for purposes of forecasting) ARIMA – models These parts can be modelled on a stationary series This part has to do with the transformation
 ARIMA – models These parts can be modelled on a stationary series This part has to do with the transformation.")
5
Different types of transformation 1. From a series with linear trend to a series with no trend: First-order differences z t = y t – y t – 1 MTB > diff c1 c2

6
Note that the differences series varies around zero.

7
2. From a series with quadratic trend to a series with no trend: Second-order differences w t = z t – z t – 1 = (y t – y t – 1 ) – (y t – 1 – y t – 2 ) = y t – 2y t – 1 + y t – 2 MTB > diff 2 c3 c4
 – (y t – 1 – y t – 2 ) = y t – 2y t – 1 + y t – 2 MTB > diff 2 c3 c4.")
9
3. From a series with non-constant variance (heteroscedastic) to a series with constant variance (homoscedastic): Box-Cox transformations (per def 1964) Practically is chosen so that y t + is always > 0 Simpler form: If we know that y t is always > 0 (as is the usual case for measurements)
 to a series with constant variance (homoscedastic): Box-Cox transformations (per def 1964) Practically is chosen so that y t + is always > 0 Simpler form: If we know that y t is always > 0 (as is the usual case for measurements).")
10
The log transform (ln y t ) usually also makes the data ”more” normally distributed Example: Application of root ( y t ) and log (ln y t ) transforms
 usually also makes the data more normally distributed Example: Application of root ( y t ) and log (ln y t ) transforms")
11
AR-models (for stationary time series) Consider the model y t = δ + ·y t –1 + a t with {a t } i.i.d with zero mean and constant variance = σ 2 and where δ (delta) and (phi) are (unknown) parameters Set δ = 0 by sake of simplicity E(y t ) = 0 Let R(k) = Cov(y t,y t-k ) = Cov(y t,y t+k ) = E(y t ·y t-k ) = E(y t ·y t+k ) R(0) = Var(y t ) assumed to be constant
 Consider the model y t = δ + ·y t –1 + a t with {a t } i.i.d with zero mean and constant variance = σ 2 and where δ (delta) and (phi) are (unknown) parameters Set δ = 0 by sake of simplicity E(y t ) = 0 Let R(k) = Cov(y t,y t-k ) = Cov(y t,y t+k ) = E(y t ·y t-k ) = E(y t ·y t+k ) R(0) = Var(y t ) assumed to be constant")
12
Now: R(0) = E(y t ·y t ) = E(y t ·( ·y t-1 + a t ) = · E(y t ·y t-1 ) + E(y t ·a t ) = = ·R(1) + E(( ·y t-1 + a t ) ·a t ) = ·R(1) + · E(y t-1 ·a t ) + E(a t ·a t )= = ·R(1) + 0 + σ 2 (for a t is independent of y t-1 ) R(1) = E(y t ·y t+1 ) = E(y t ·( ·y t + a t+1 ) = · E(y t ·y t ) + E(y t ·a t+1 ) = = ·R(0) + 0 (for a t+1 is independent of y t ) R(2) = E(y t ·y t+2 ) = E(y t ·( ·y t+1 + a t+2 ) = · E(y t ·y t+1 ) + + E(y t ·a t+2 ) = ·R(1) + 0 (for a t+1 is independent of y t )
 = E(y t ·y t ) = E(y t ·( ·y t-1 + a t ) = · E(y t ·y t-1 ) + E(y t ·a t ) = = ·R(1) + E(( ·y t-1 + a t ) ·a t ) = ·R(1) + · E(y t-1 ·a t ) + E(a t ·a t )= = ·R(1) σ 2 (for a t is independent of y t-1 ) R(1) = E(y t ·y t+1 ) = E(y t ·( ·y t + a t+1 ) = · E(y t ·y t ) + E(y t ·a t+1 ) = = ·R(0) + 0 (for a t+1 is independent of y t ) R(2) = E(y t ·y t+2 ) = E(y t ·( ·y t+1 + a t+2 ) = · E(y t ·y t+1 ) + + E(y t ·a t+2 ) = ·R(1) + 0 (for a t+1 is independent of y t ) ")
13
R(0) = ·R(1) + σ 2 R(1) = ·R(0)Yule-Walker equations R(2) = ·R(1) … R(k ) = ·R(k – 1) =…= k ·R(0) R(0) = 2 ·R(0) + σ 2
 = ·R(1) + σ 2 R(1) = ·R(0)Yule-Walker equations R(2) = ·R(1) … R(k ) = ·R(k – 1) =…= k ·R(0) R(0) = 2 ·R(0) + σ 2 ")
14
Note that for R(0) to become positive and finite (which we require from a variance) the following must hold: This in effect the condition for an AR(1)-process to be weakly stationary Note now that
 to become positive and finite (which we require from a variance) the following must hold: This in effect the condition for an AR(1)-process to be weakly stationary Note now that")
15
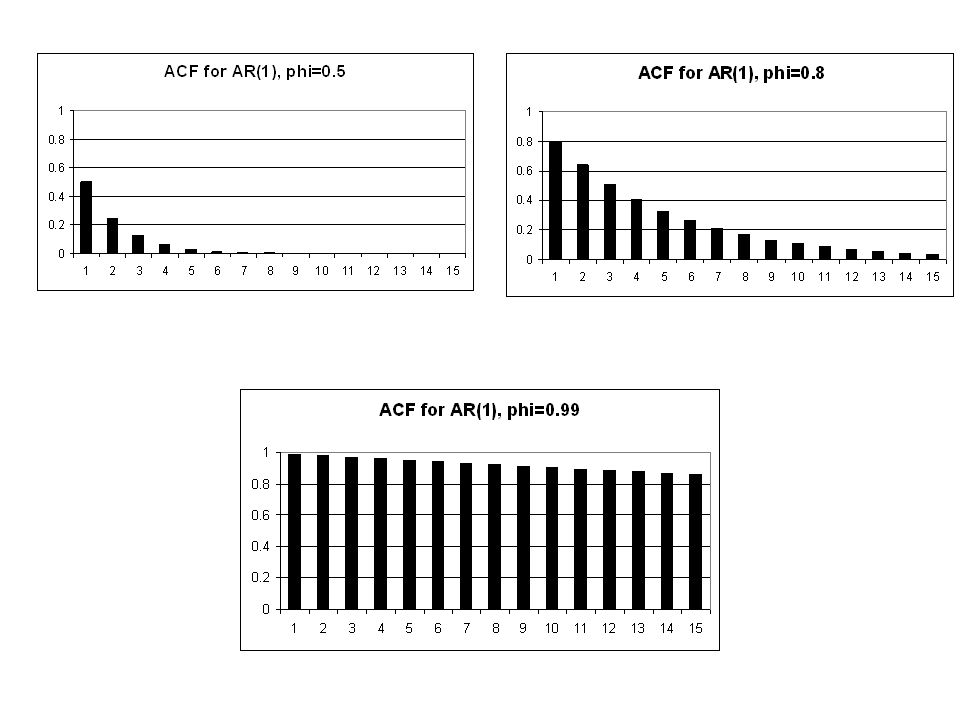
ρ k is called the Autocorrelation function (ACF) of y t ”Auto” because it gives correlations within the same time series. For pairs of different time series one can define the Cross correlation function which gives correlations at different lags between series. By studying the ACF it might be possible to identify the approximate magnitude of

16
Examples:

19
The look of an ACF can be similar for different kinds of time series, e.g. the ACF for an AR(1) with = 0.3 could be approximately the same as the ACF for an Auto-regressive time series of higher order than 1 (we will discuss higher order AR-models later) To do a less ambiguous identification we need another statistic: The Partial Autocorrelation function (PACF): υ k = Corr (y t,y t-k | y t-k+1, y t-k+2,…, y t-1 ) i.e. the conditional correlation between y t and y t-k given all observations in-between. Note that –1 υ k 1
 with = 0.3 could be approximately the same as the ACF for an Auto-regressive time series of higher order than 1 (we will discuss higher order AR-models later) To do a less ambiguous identification we need another statistic: The Partial Autocorrelation function (PACF): υ k = Corr (y t,y t-k | y t-k+1, y t-k+2,…, y t-1 ) i.e. the conditional correlation between y t and y t-k given all observations in-between. Note that –1 υ k 1.")
20
A concept sometimes hard to interpret, but it can be shown that for AR(1)-models with positive the look of the PACF is and for AR(1)-models with negative the look of the PACF is
-models with positive the look of the PACF is and for AR(1)-models with negative the look of the PACF is")
21
Assume now that we have a sample y 1, y 2,…, y n from a time series assumed to follow an AR(1)-model. Example:

22
The ACF and the PACF can be estimated from data by their sample counterparts: Sample Autocorrelation function (SAC): if n large, otherwise a scaling might be needed Sample Partial Autocorrelation function (SPAC) Complicated structure, so not shown here
: if n large, otherwise a scaling might be needed Sample Partial Autocorrelation function (SPAC) Complicated structure, so not shown here")
23
The variance function of these two estimators can also be estimated Opportunity to test H 0 : k = 0vs.H a : k 0 or H 0 : k = 0vs.H a : k 0 for a particular value of k. Estimated sample functions are usually plotted together with critical limits based on estimated variances.

24
Example (cont) DKK/USD exchange: SAC: SPAC: Critical limits
 DKK/USD exchange: SAC: SPAC: Critical limits")
25
Ignoring all bars within the red limits, we would identify the series as being an AR(1) with positive . The value of is approximately 0.9 (ordinate of first bar in SAC plot and in SPAC plot)
.")
26
Higher-order AR-models AR(2):or y t-2 must be present AR(3): or other combinations with 3 y t-3 AR(p): i.e. different combinations with p y t-p

27
Stationarity conditions: For p > 2, difficult to express on closed form. For p = 2: The values of 1 and 2 must lie within the blue triangle in the figure below:

28
Typical patterns of ACF and PACF functions for higher order stationary AR-models (AR( p )): ACF: Similar pattern as for AR(1), i.e. (exponentially) decreasing bars, (most often) positive for 1 positive and alternating for 1 negative. PACF: The first p values of k are non-zero with decreasing magnitude. The rest are all zero (cut-off point at p ) (Most often) all positive if 1 positive and alternating if 1 negative
 decreasing bars, (most often) positive for 1 positive and alternating for 1 negative. PACF: The first p values of k are non-zero with decreasing magnitude. The rest are all zero (cut-off point at p ) (Most often) all positive if 1 positive and alternating if 1 negative.")
29
Examples: AR(2), 1 positive: AR(5), 1 negative:
, 1 positive: AR(5), 1 negative:")
Similar presentations







 Models>")
 Material.>")



 sample time series data -If our Chapter 10 assumptions fail, we.>")


- process. (Spikes are clearly decreasing in SAC.>")



 is average of last m observations>")

