Download presentation
Presentation is loading. Please wait.

1
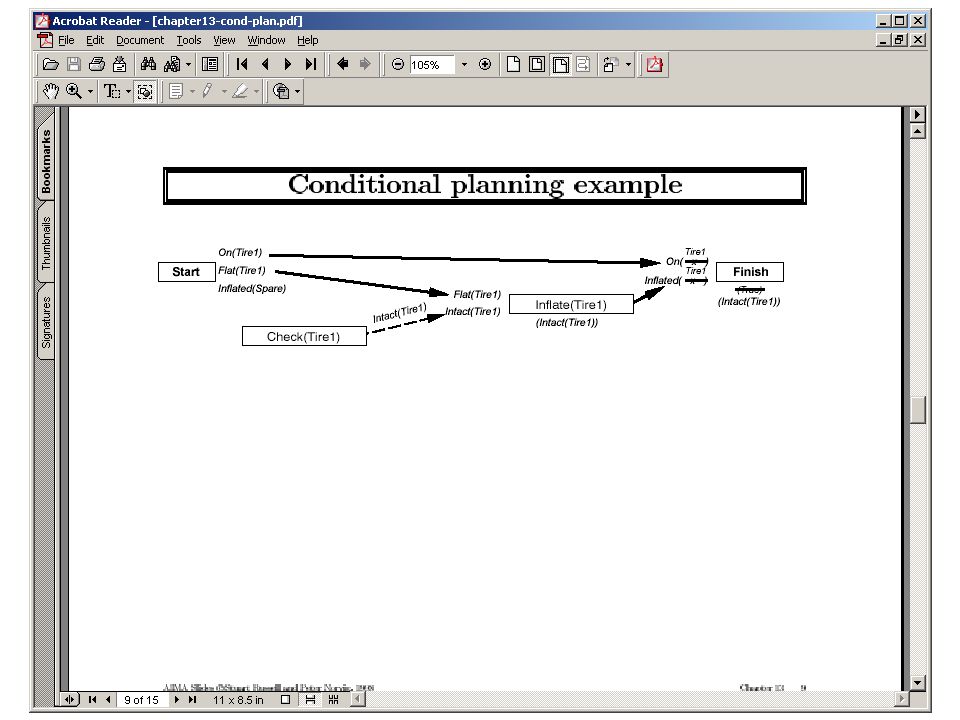
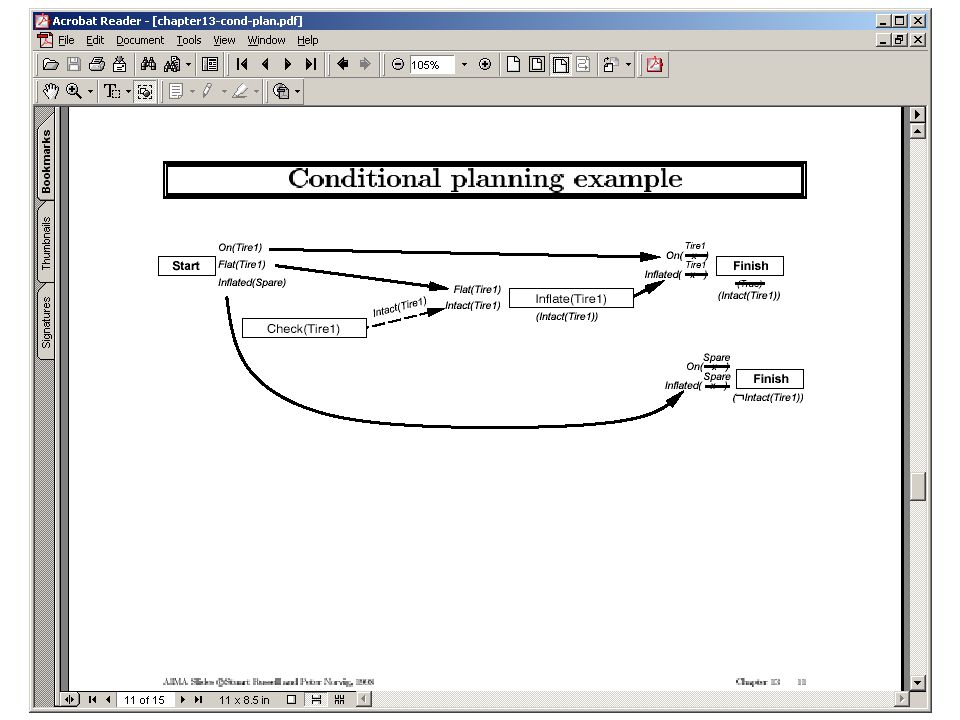
4/29: Conditional Planning No Final. Instead we will have a last homework Midterm to be returned Thursday; Homework reached Hanoi Extra class on Thursday?

2
Conformant Heuristics

3
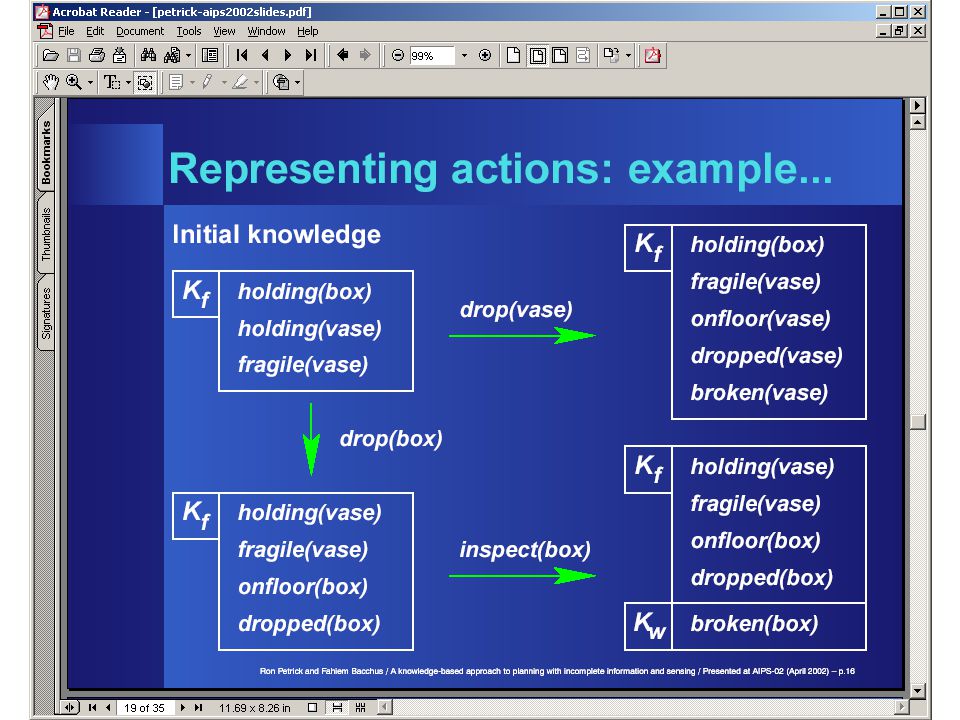
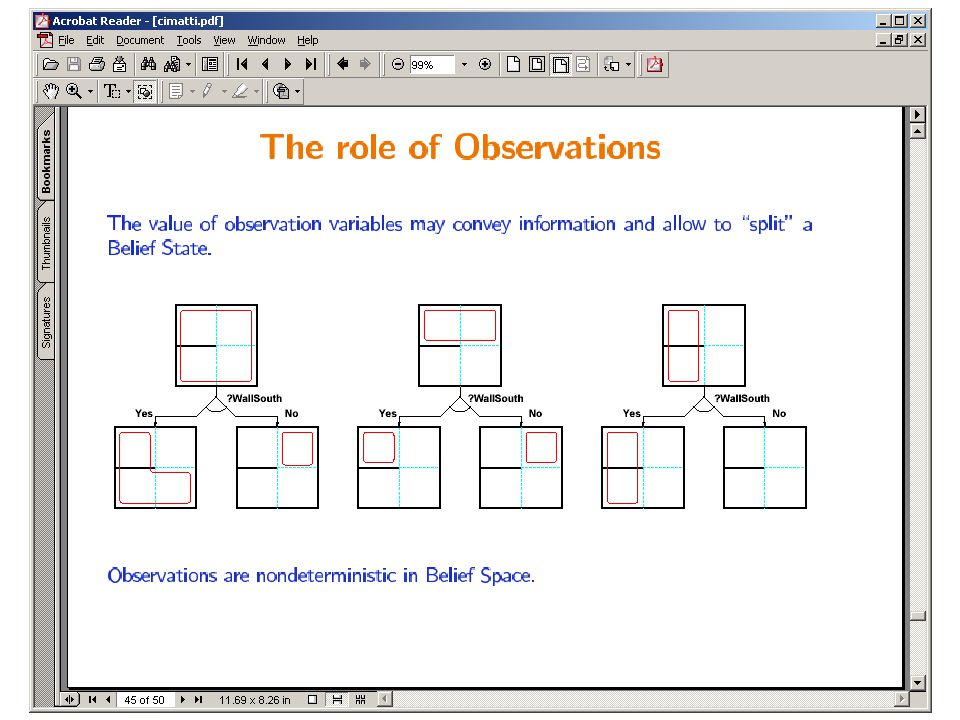
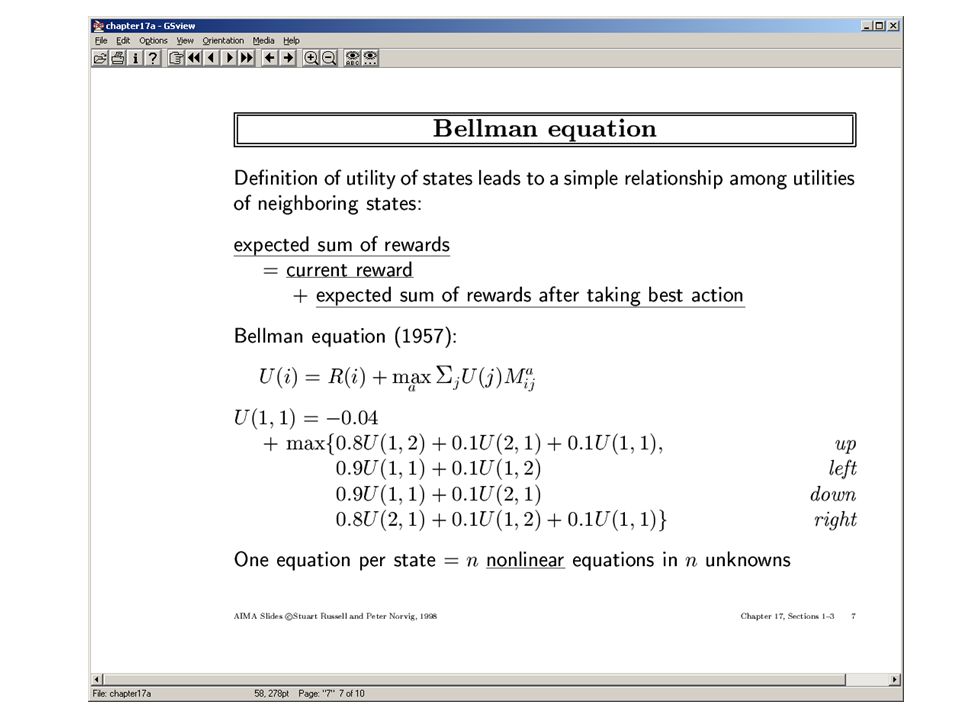
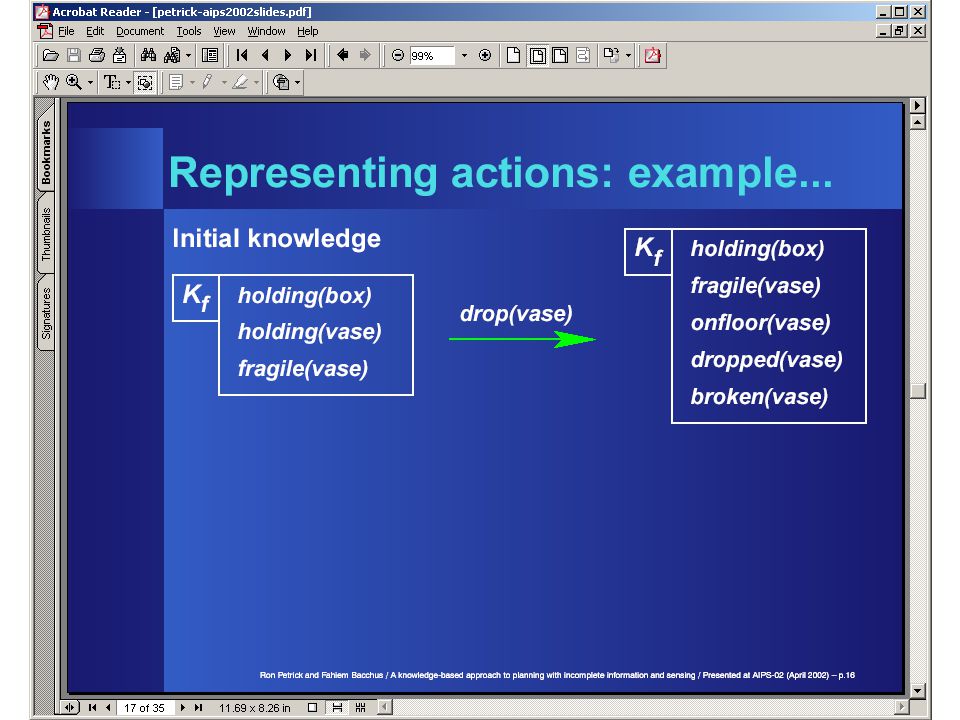
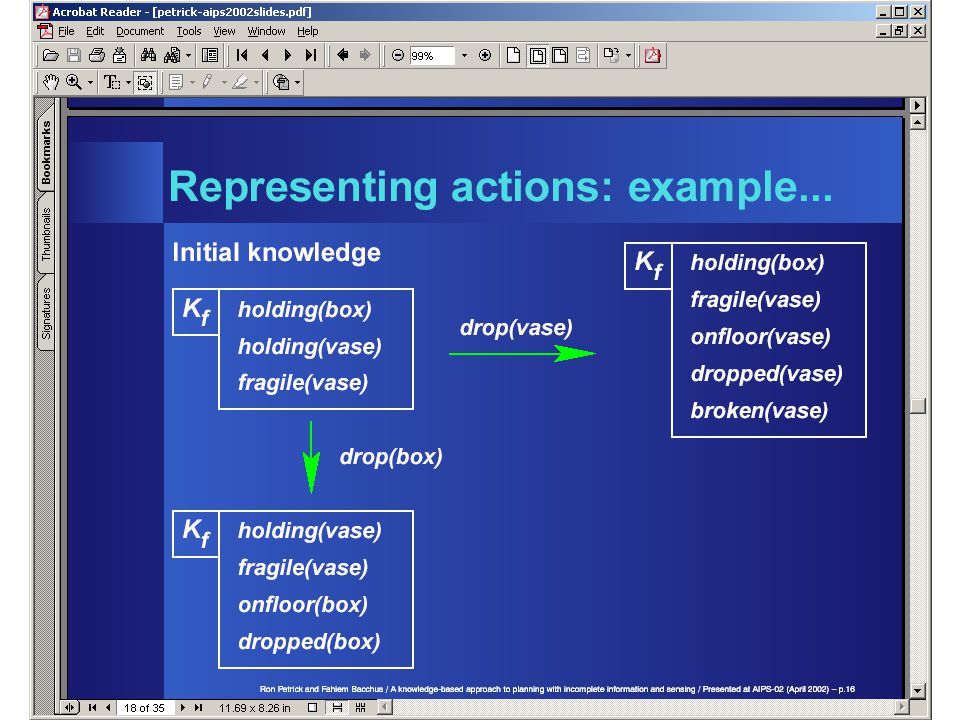
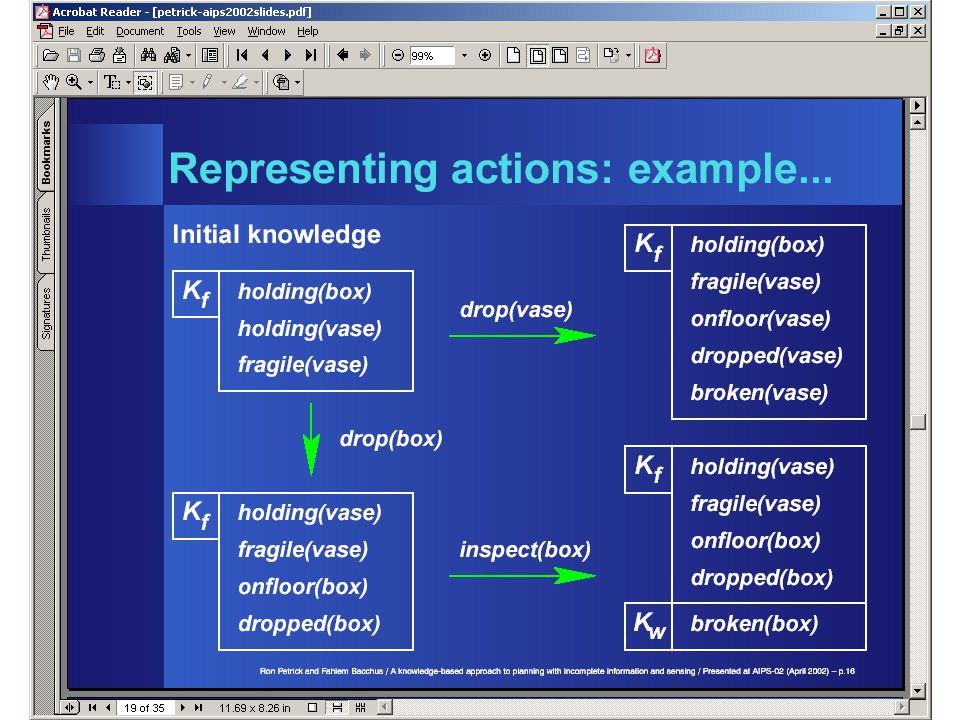
Sensing: General observations Sensing can be thought in terms of Speicific state variables whose values can be found OR sensing actions that evaluate truth of some boolean formula over the state variables. Sense(p) ; Sense(pV(q&r)) A general action may have both causative effects and sensing effects Sensing effect changes the agent’s knowledge, and not the world Causative effect changes the world (and may give certain knowledge to the agent) A pure sensing action only has sensing effects; a pure causative action only has causative effects. When applied to a belief state, the sensing effects of an action wind up reducing the cardinality of that belief state basically by removing all states that are not consistent with the sensed effects Sensing actions introduce branches into the plans If you apply Sense-A? to a belief state B, you get a partition of B: B A and B ~A You will have to make a plan for both the branches. And/Or search in the space of belief states
 ; Sense(pV(q&r)) A general action may have both causative effects and sensing effects Sensing effect changes the agent’s knowledge, and not the world Causative effect changes the world (and may give certain knowledge to the agent) A pure sensing action only has sensing effects; a pure causative action only has causative effects. When applied to a belief state, the sensing effects of an action wind up reducing the cardinality of that belief state basically by removing all states that are not consistent with the sensed effects Sensing actions introduce branches into the plans If you apply Sense-A. to a belief state B, you get a partition of B: B A and B ~A You will have to make a plan for both the branches. And/Or search in the space of belief states.")
4
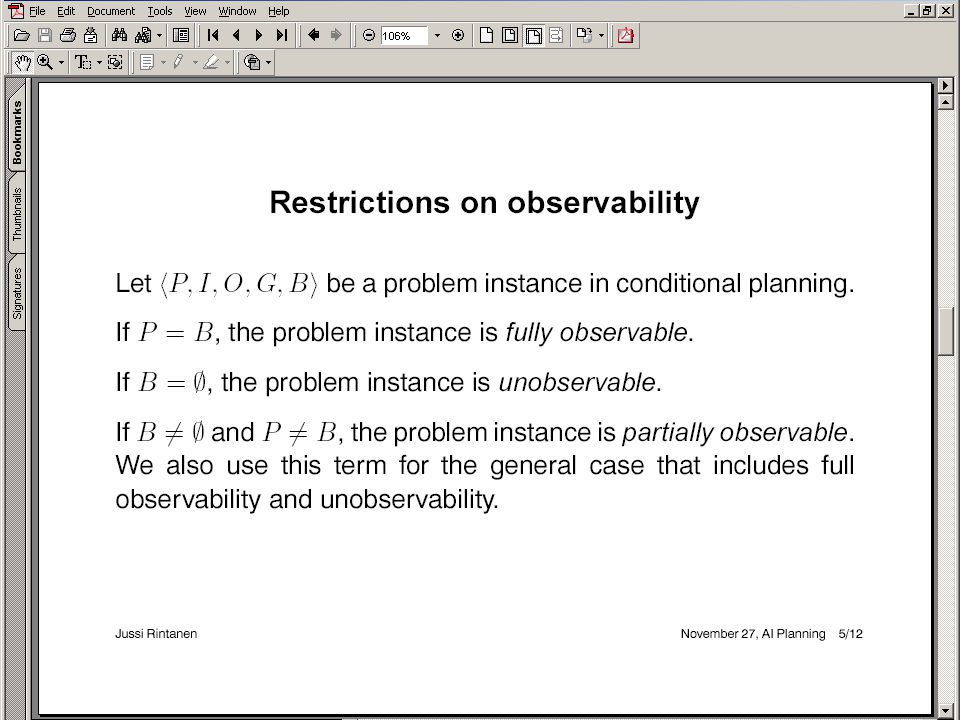
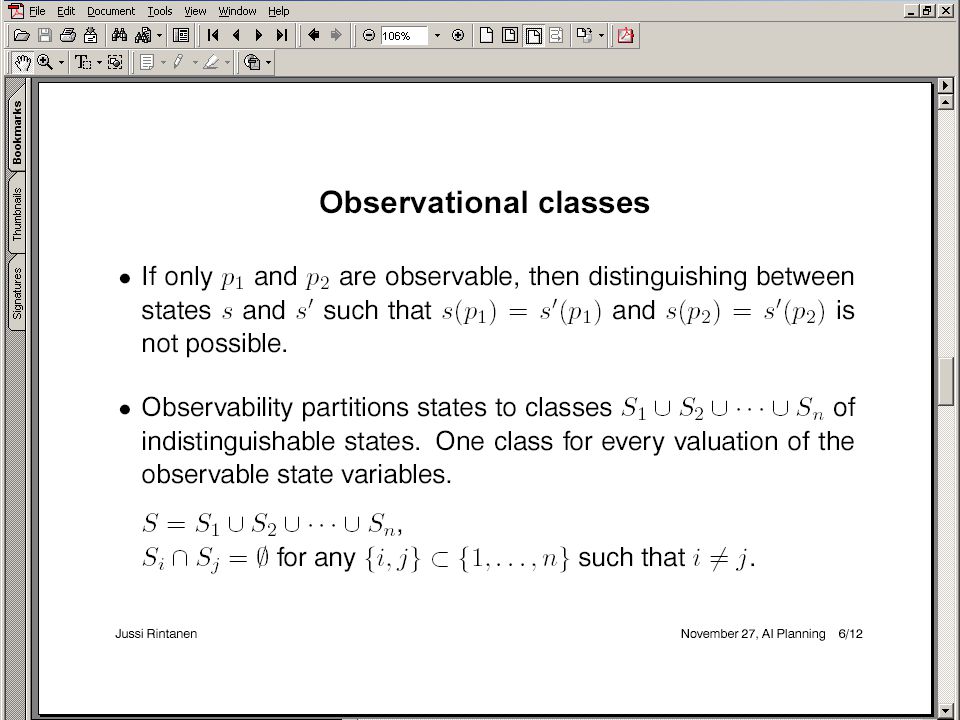
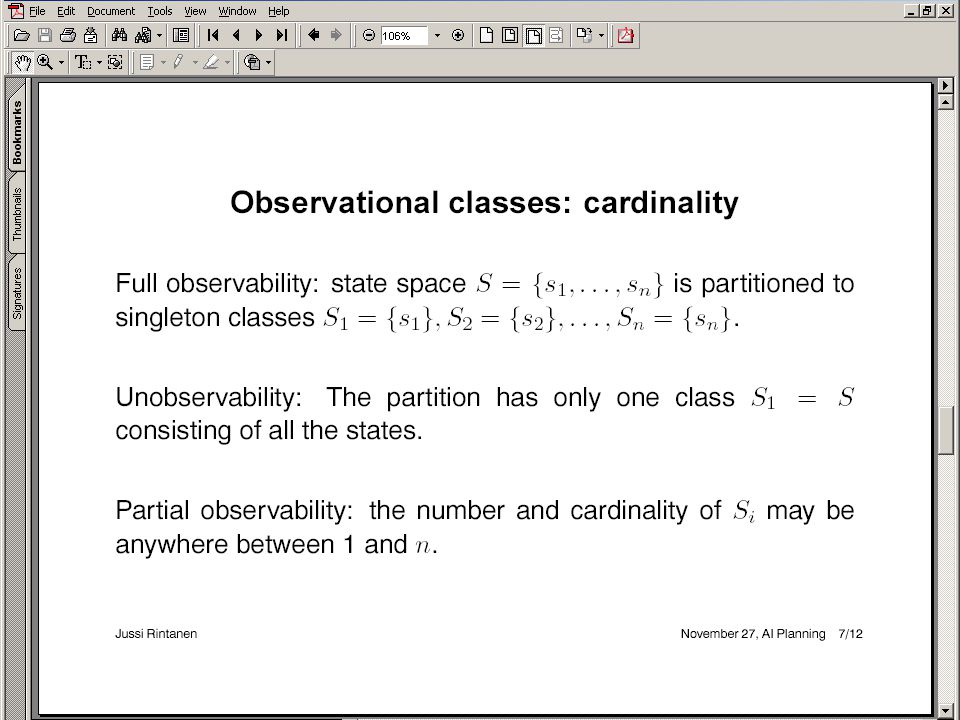
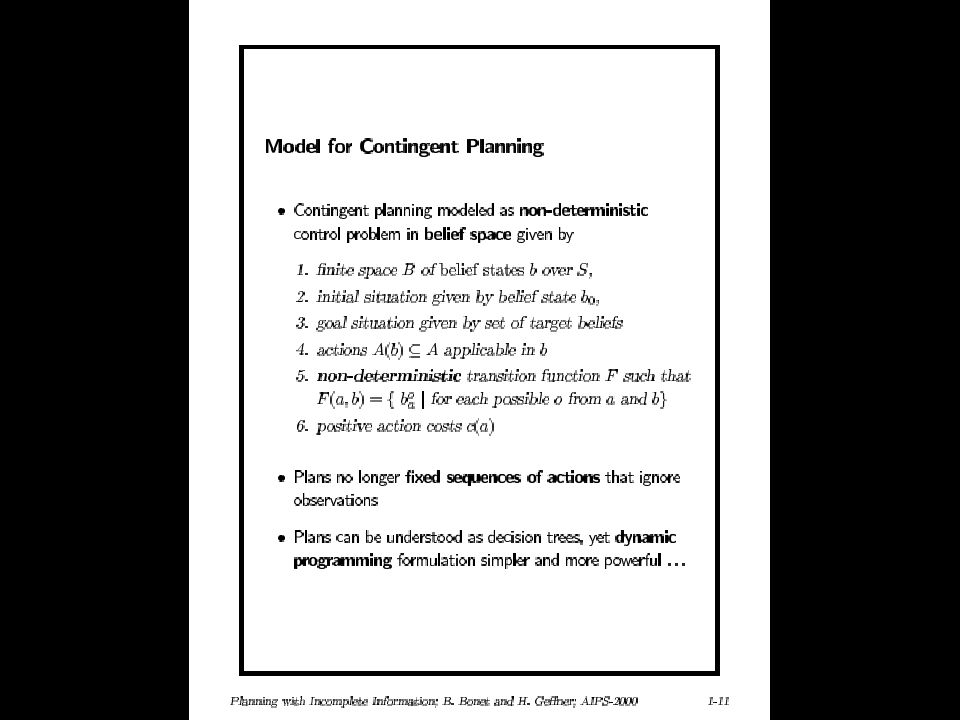
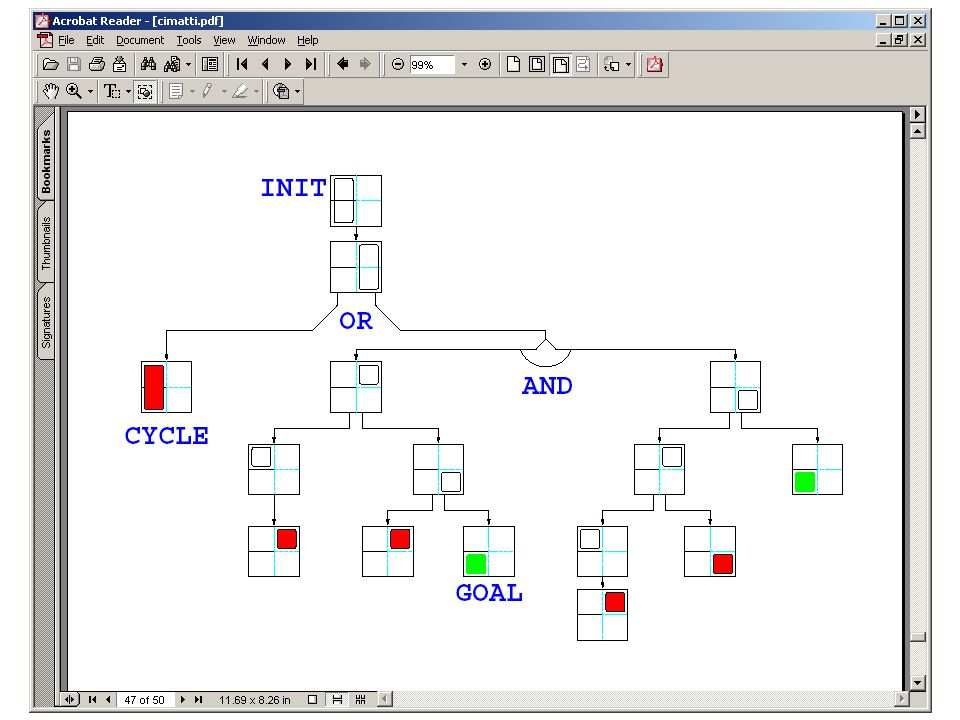
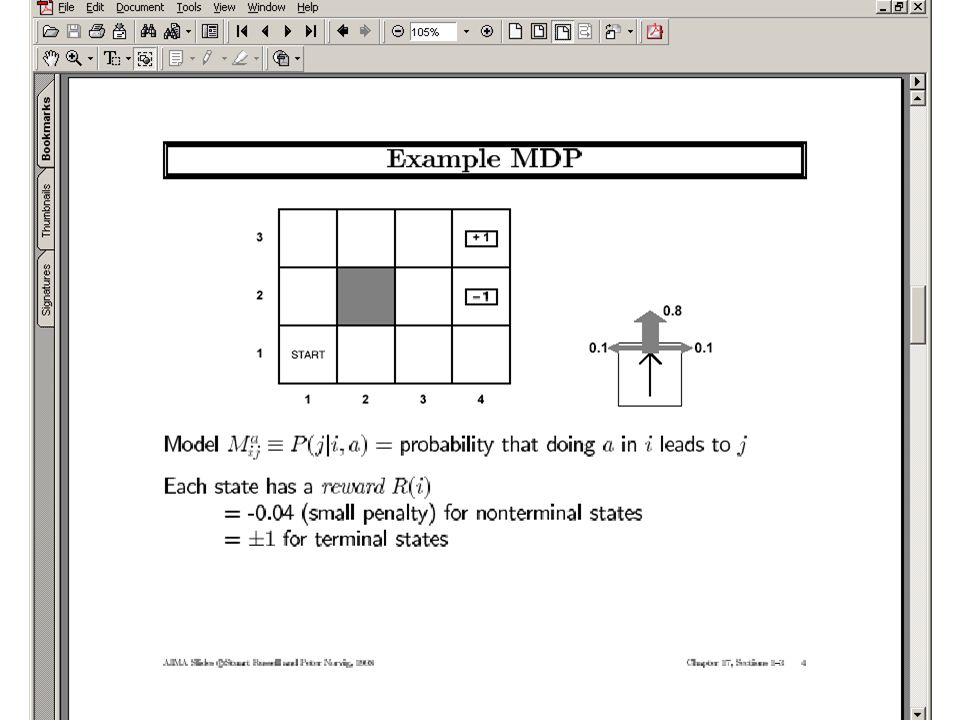
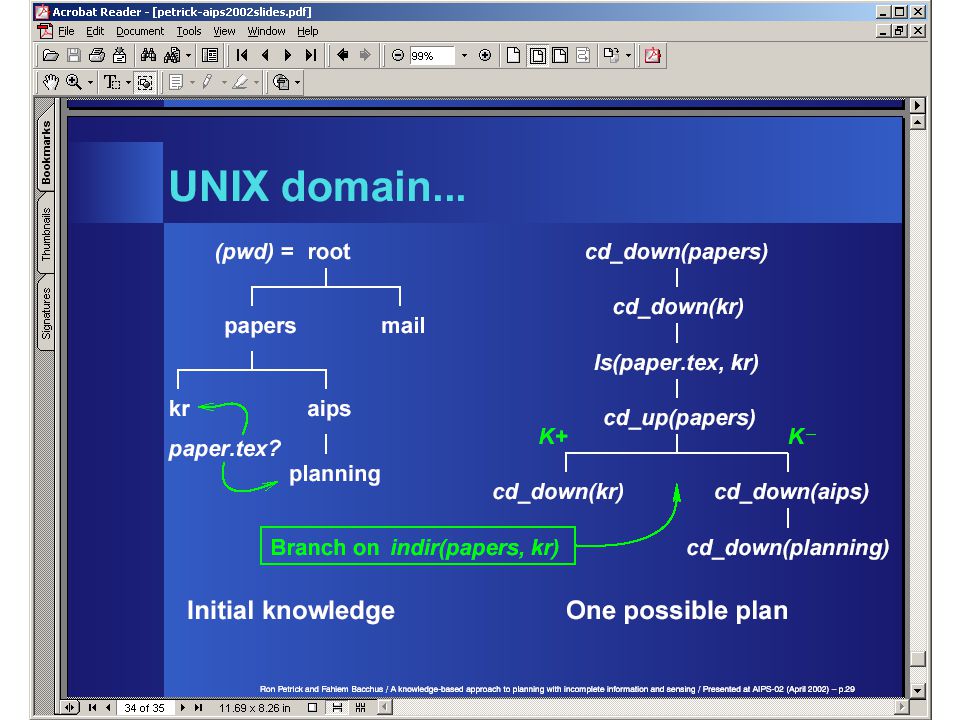
First we will see a model where observability is in terms of state variables Next we shall see a model where observability can be in terms of formulas [Bonet&Geffner]
![First we will see a model where observability is in terms of state variables Next we shall see a model where observability can be in terms of formulas [Bonet&Geffner]](http://images.slideplayer.com/16/5208357/slides/slide_4.jpg "First we will see a model where observability is in terms of state variables Next we shall see a model where observability can be in terms of formulas [Bonet&Geffner]")
5
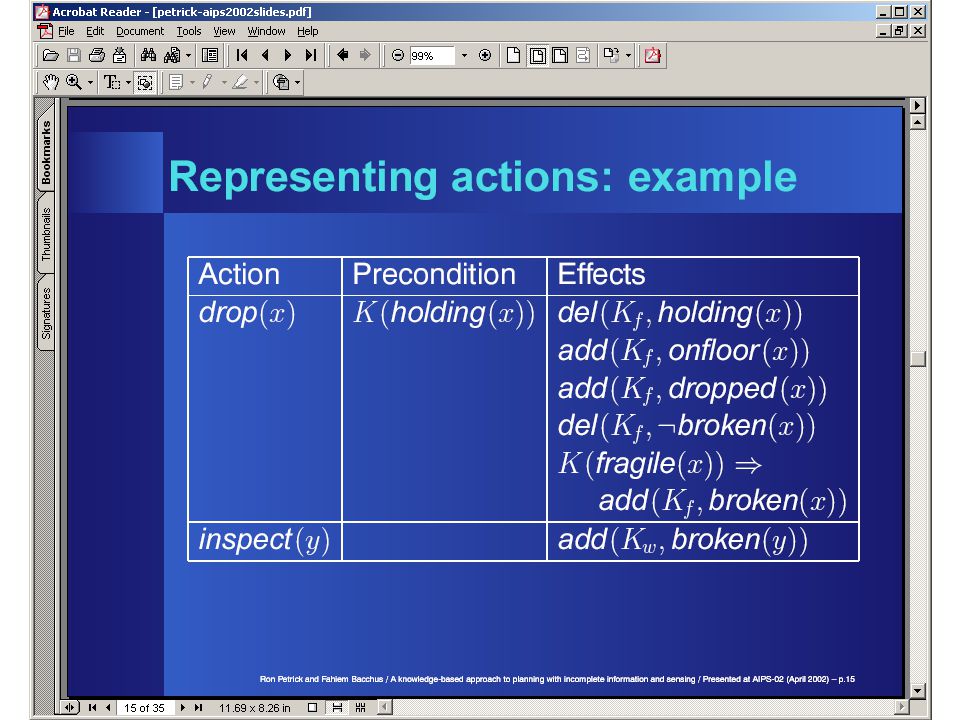
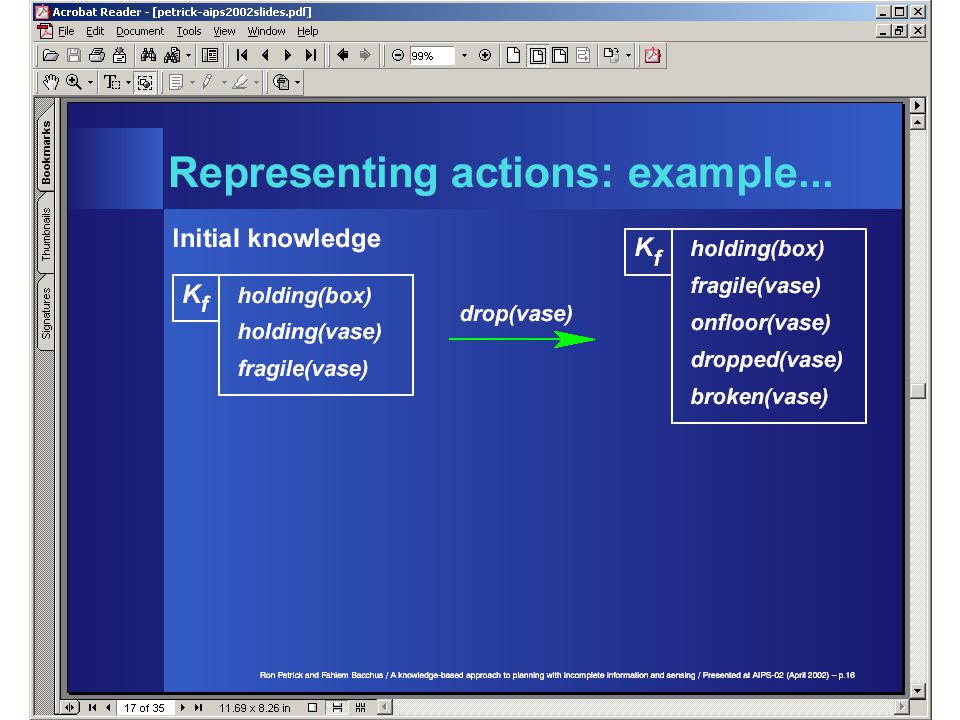
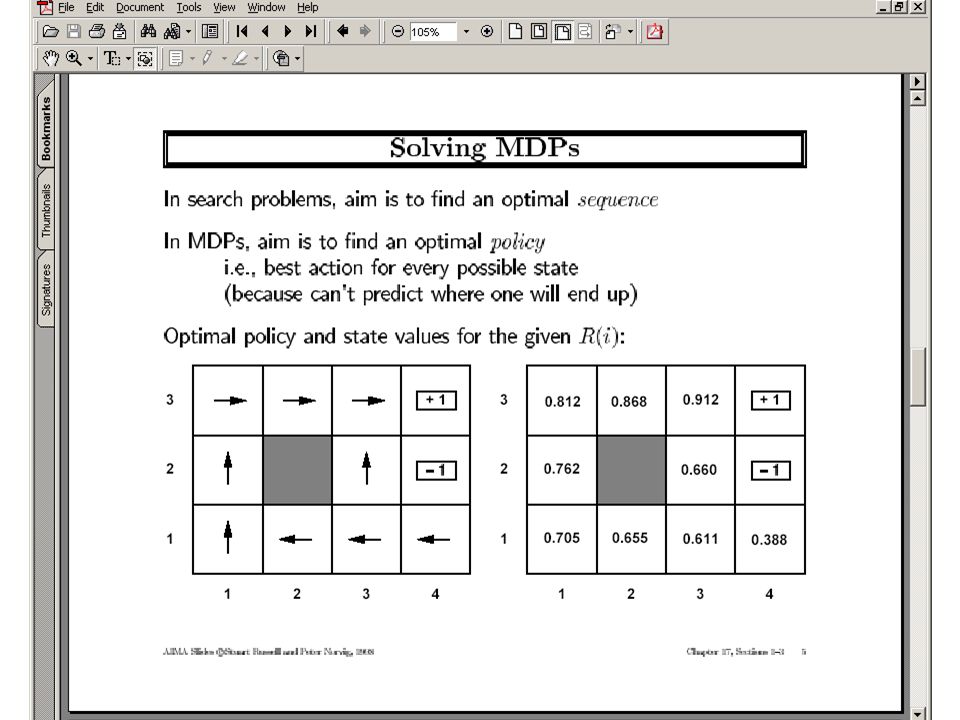
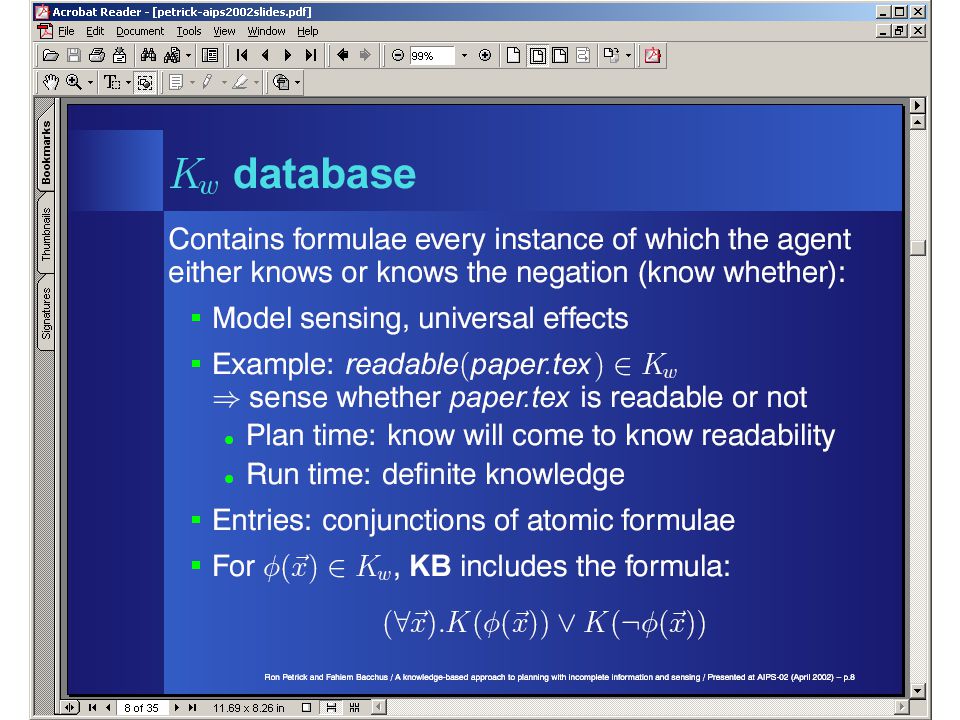
Modeling observability in terms of observation actions that give values of single state variables If a state variable p Is in B, then there is some action A p that Can sense whether p is true or false

10
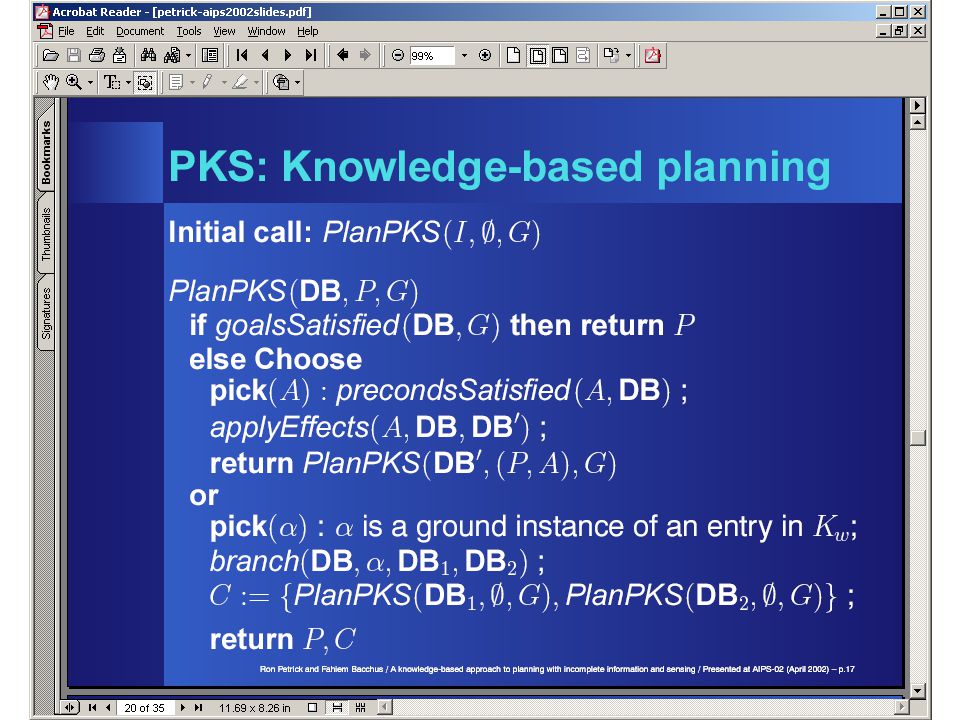
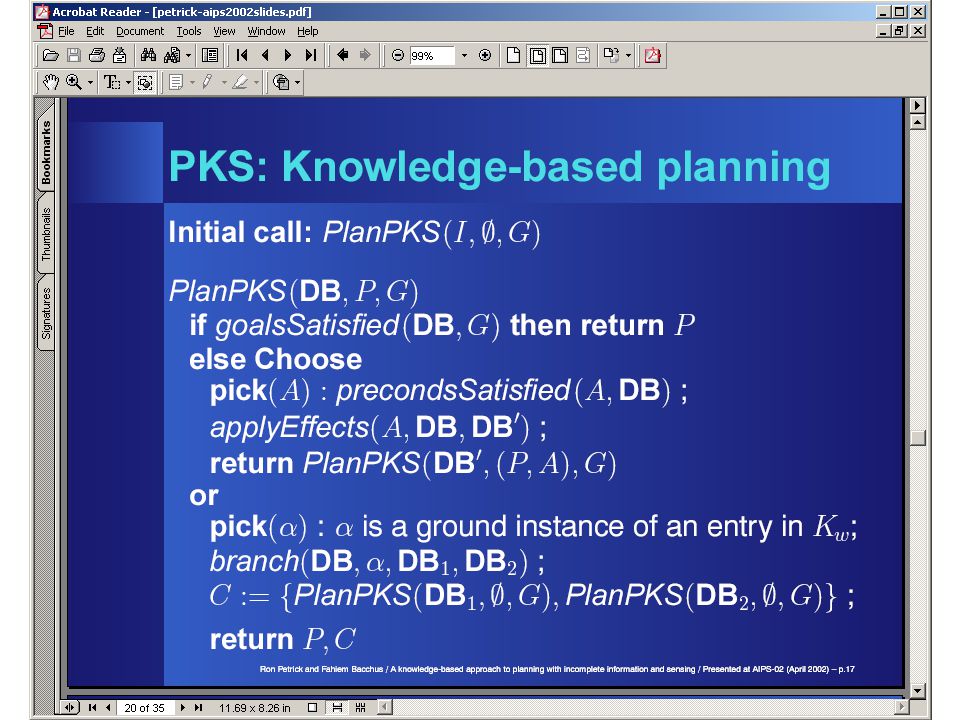
A Simple Progression Algorithm in the presence of pure sensing actions Call the procedure Plan(B I,G,nil) where Procedure Plan(B,G,P) If G is satisfied in all states of B, then return P Non-deterministically choose: I. Non-deterministically choose a causative action a that is applicable in B. Return Plan(a(B),G,P+a) II. Non-deterministically choose a sensing action s that senses a formula f (could be a single state variable) Let p’ = Plan(B f,G,nil); p’’=Plan(B ~f,G,nil) /*B f is the set of states of B in which f is true */ Return P+(s?:p’;p’’) If we always pick I and never do II then we will produce conformant Plans (if we succeed).
,G,P+a) II. Non-deterministically choose a sensing action s that senses a formula f (could be a single state variable) Let p’ = Plan(B f,G,nil); p’’=Plan(B ~f,G,nil) /*B f is the set of states of B in which f is true */ Return P+(s :p’;p’’) If we always pick I and never do II then we will produce conformant Plans (if we succeed)..")
11
Remarks on the progression with sensing actions Progression is implicitly finding an AND subtree of an AND/OR Graph If we look for AND subgraphs, we can represent looping plans. The amount of sensing done in the eventual solution plan is controlled by how often we pick step I vs. step II (if we always pick I, we get conformant solutions). Progression is as clue-less as to whether to do sensing and which sensing to do, as it is about which causative action to apply Need heuristic support
. Progression is as clue-less as to whether to do sensing and which sensing to do, as it is about which causative action to apply Need heuristic support.")
12
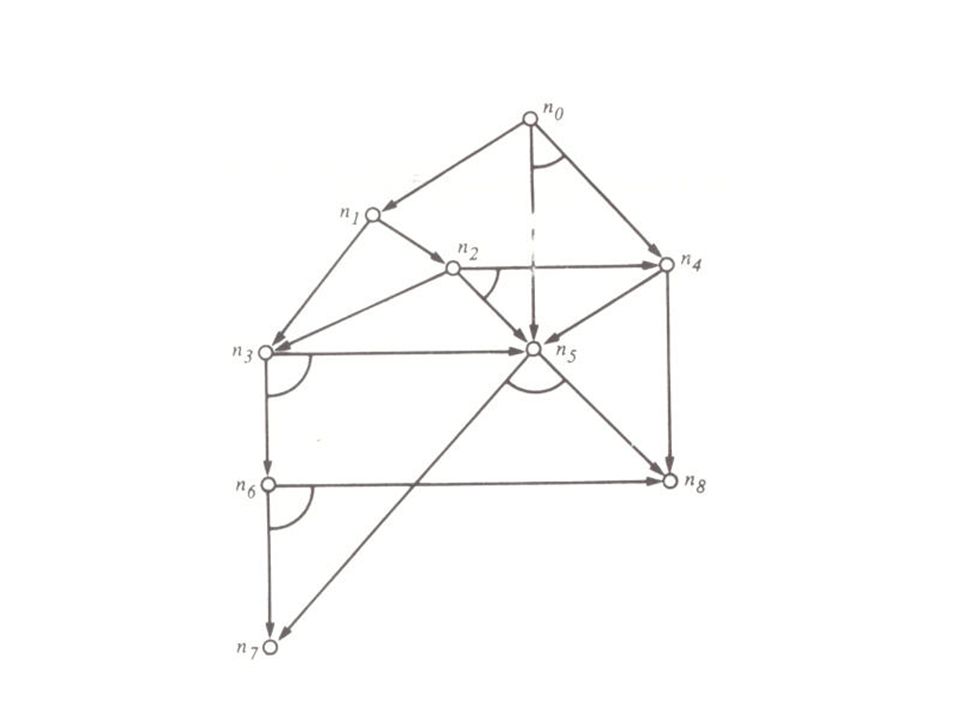
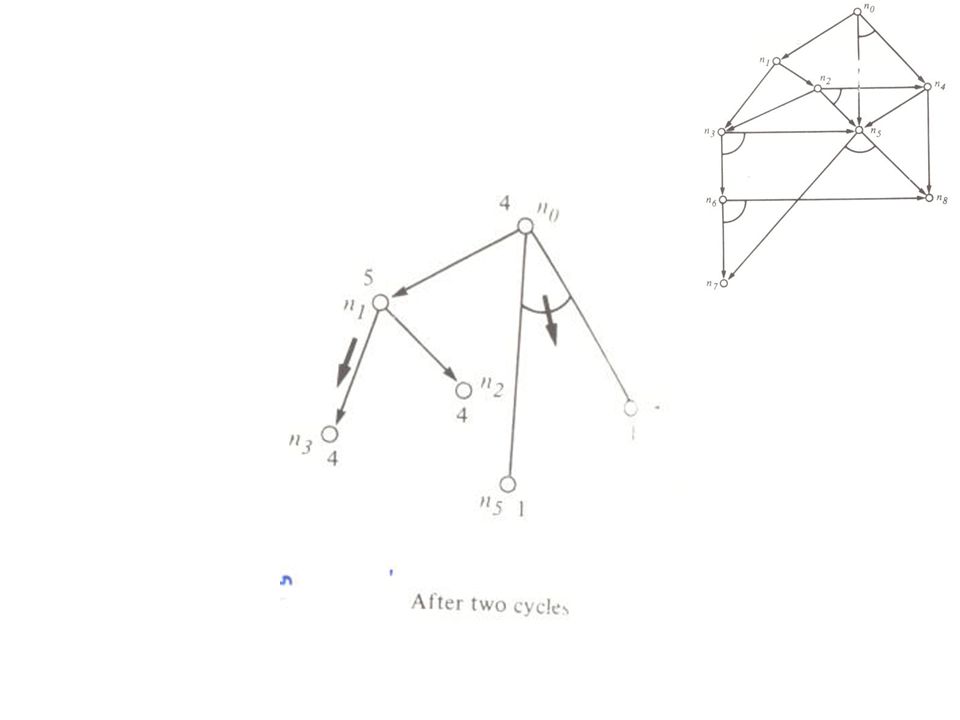
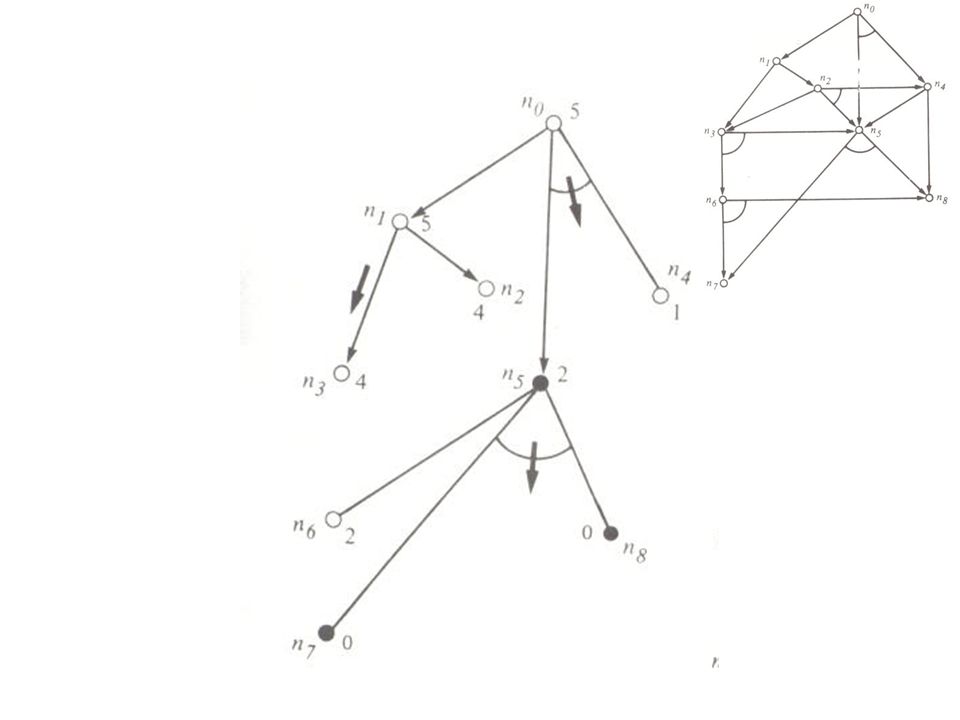
Geffner’s model

20
5/1: Conditional Planning (contd) Midterms returned Monty Python on Conformant Planning Next class * REQUIRED READING* assigned Can we meet sometime on Monday (instead of reading class?)
 Midterms returned Monty Python on Conformant Planning Next class * REQUIRED READING* assigned Can we meet sometime on Monday (instead of reading class )")
21
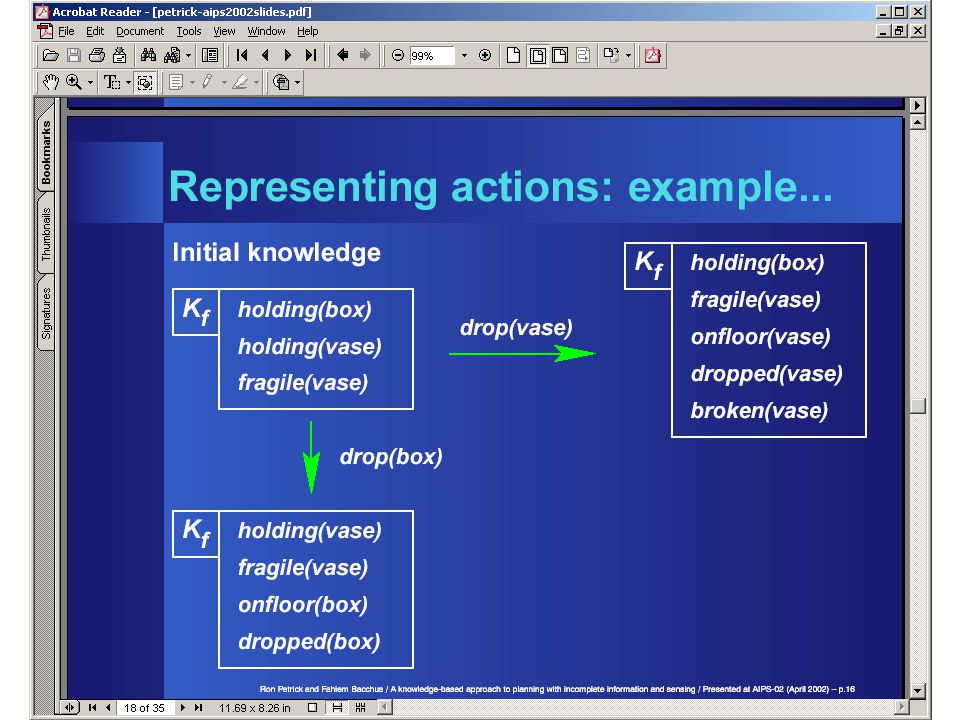
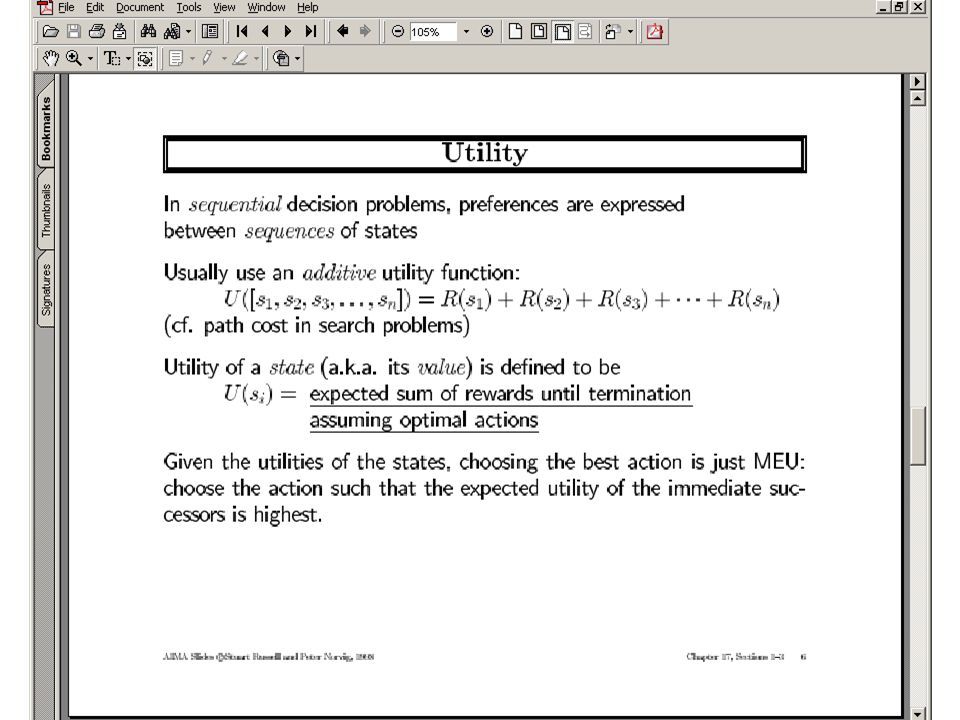
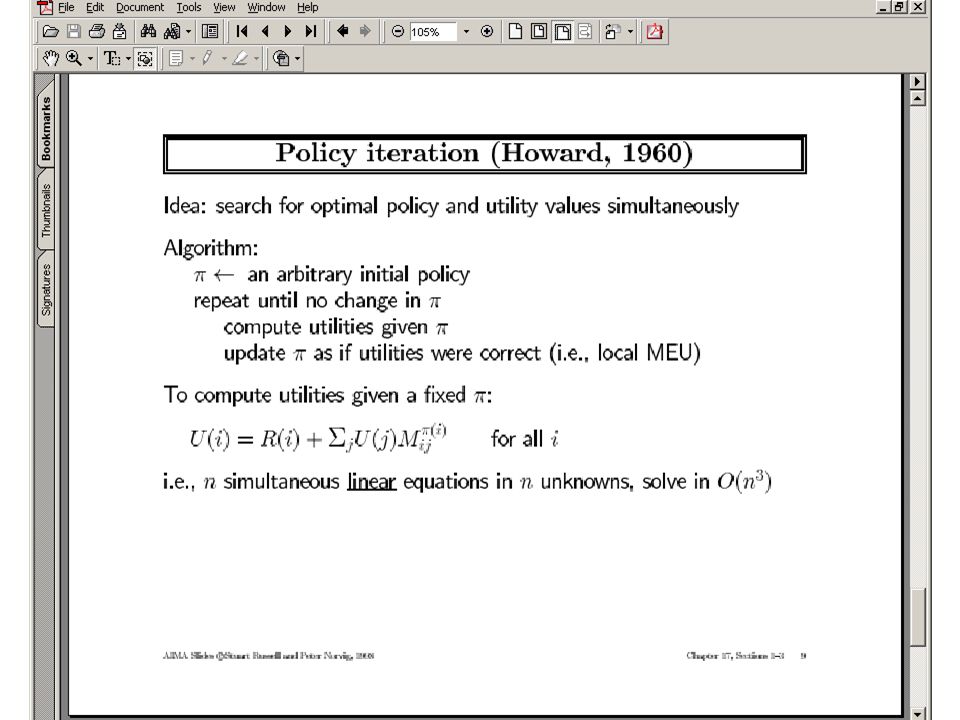
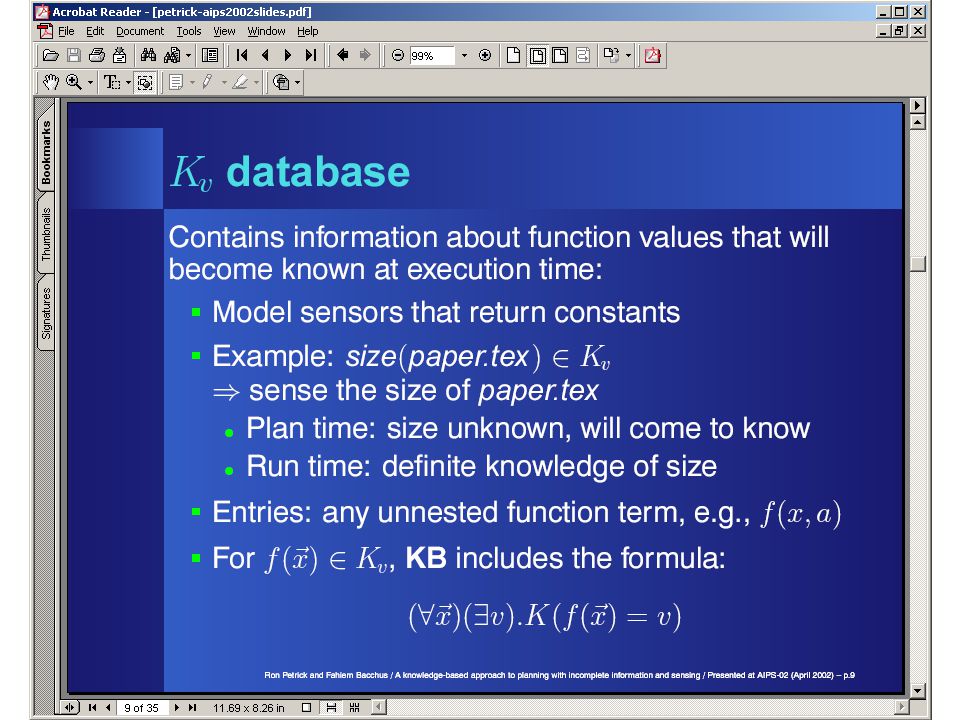
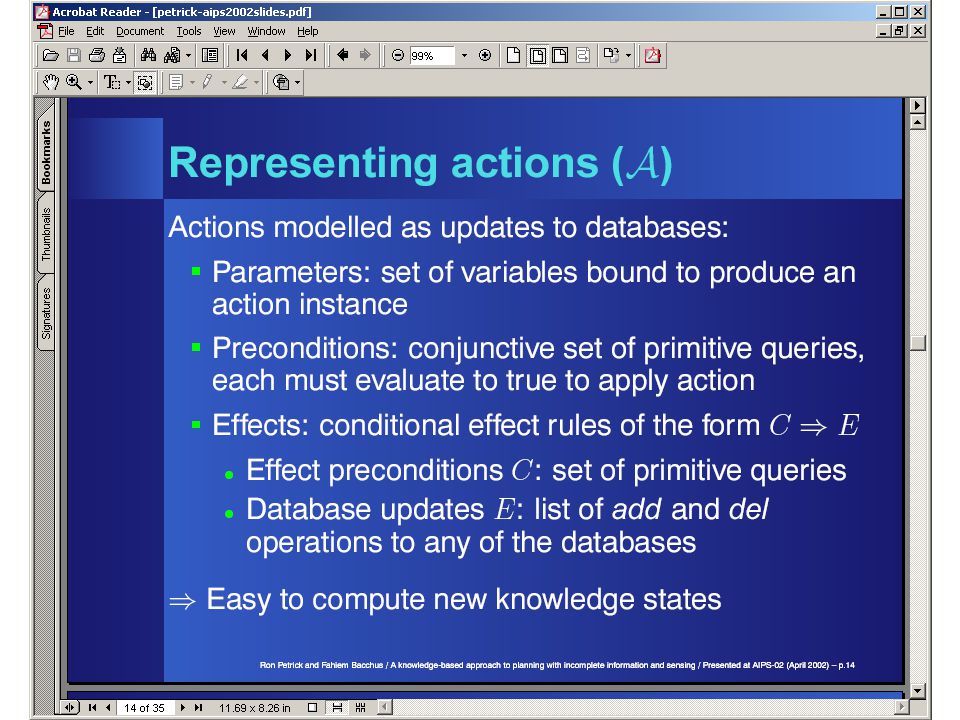
Very simple Example A1 p=>r,~p A2 ~p=>r,p A3 r=>g O5 observe(p) Problem: Init: don’t know p Goal: g Plan: O5:p?[A1 A3][A2 A3] O5:p? A1 A3 A2 A3 Y N
![Very simple Example A1 p=>r,~p A2 ~p=>r,p A3 r=>g O5 observe(p) Problem: Init: don’t know p Goal: g Plan: O5:p [A1 A3][A2 A3] O5:p.](http://images.slideplayer.com/16/5208357/slides/slide_21.jpg "A1 A3 A2 A3 Y N.")
25
nuPDDL—not yet a standard… define (domain d)... (:predicates (P1) (P2) (P3) (P4) (P5) (P6))...) (define (problem p).... (:init (and (P1) (oneof (and (P2) (P3)) (P4)) (unknown (P5))))....) define (problem p).... (:effect (and (P1) (oneof (and (P2) (P3)) (P4)) (unknown (P5))))....) (:observation wall_north - boolean :parameters () (iff (= wall_north 1) (or (= (robot_y) north) (= (robot_x) west)))) ;.... (:observation wall_east - boolean :parameters () (imply (= wall_east 0) (= (robot_x) west)) (imply (= wall_east 1) (true)) :weakgoal : it is required that the plan may reach the goal. :stronggoal : it is required that every execution of the plan reaches the goal. :strongcyclicgoal : it is required that every execution of the plan either reaches the goal, or at least always has a chance to do it :postronggoal : it is required that every execution of the plan reaches the goal, using only the observations described in the domain :conformantgoal : it is required that every execution of the plan reaches the goal, without ever observing :ctlgoal : it is required that the CTL formula expressed as a goal is satisfied throughout every possible execution of the plan. Some examples of typical extended goals follow: Do Reach p (``strong goal''): (af p) Try Reach p (``weak goal''): (ef p) Keep Trying Reach p (``strong cyclic goal''): (aw (ef p) p) http://sra.itc.it/tools/mbp/NuPDDL.html
 (P2) (P3) (P4) (P5) (P6))...) (define (problem p).... (:init (and (P1) (oneof (and (P2) (P3)) (P4)) (unknown (P5))))....) define (problem p).... (:effect (and (P1) (oneof (and (P2) (P3)) (P4)) (unknown (P5))))....) (:observation wall_north - boolean :parameters () (iff (= wall_north 1) (or (= (robot_y) north) (= (robot_x) west)))) ;.... (:observation wall_east - boolean :parameters () (imply (= wall_east 0) (= (robot_x) west)) (imply (= wall_east 1) (true)) :weakgoal : it is required that the plan may reach the goal. :stronggoal : it is required that every execution of the plan reaches the goal. :strongcyclicgoal : it is required that every execution of the plan either reaches the goal, or at least always has a chance to do it :postronggoal : it is required that every execution of the plan reaches the goal, using only the observations described in the domain :conformantgoal : it is required that every execution of the plan reaches the goal, without ever observing :ctlgoal : it is required that the CTL formula expressed as a goal is satisfied throughout every possible execution of the plan. Some examples of typical extended goals follow: Do Reach p (``strong goal ): (af p) Try Reach p (``weak goal ): (ef p) Keep Trying Reach p (``strong cyclic goal ): (aw (ef p) p)")
26
A Simple Progression Algorithm in the presence of pure sensing actions Call the procedure Plan(B I,G,nil) where Procedure Plan(B,G,P) If B is a subset of B G (or any B’ in P that is marked “solved”) return P (propagate “solve” marking upwards) Non-deterministically choose: I. Non-deterministically choose a causative action a that is applicable in B. Return Plan(a(B),G,P+a) II. Non-deterministically choose a sensing action s that senses a formula f (could be a single state variable) Let p’ = Plan(B f,G,nil); p’’=Plan(B ~f,G,nil) /*B f is the set of states of B in which f is true */ Return P+(s?:p’;p’’) If we always pick I and never do II then we will produce conformant Plans (if we succeed).
,G,P+a) II. Non-deterministically choose a sensing action s that senses a formula f (could be a single state variable) Let p’ = Plan(B f,G,nil); p’’=Plan(B ~f,G,nil) /*B f is the set of states of B in which f is true */ Return P+(s :p’;p’’) If we always pick I and never do II then we will produce conformant Plans (if we succeed)..")
27
Remarks on the progression with sensing actions Progression is implicitly finding an AND subgraph of an AND/OR Graph The amount of sensing done in the eventual solution plan is controlled by how often we pick step I vs. step II (if we always pick I, we get conformant solutions). Progression is as clue-less as to whether to do sensing and which sensing to do, as it is about which causative action to apply Need heuristic support
. Progression is as clue-less as to whether to do sensing and which sensing to do, as it is about which causative action to apply Need heuristic support.")
28
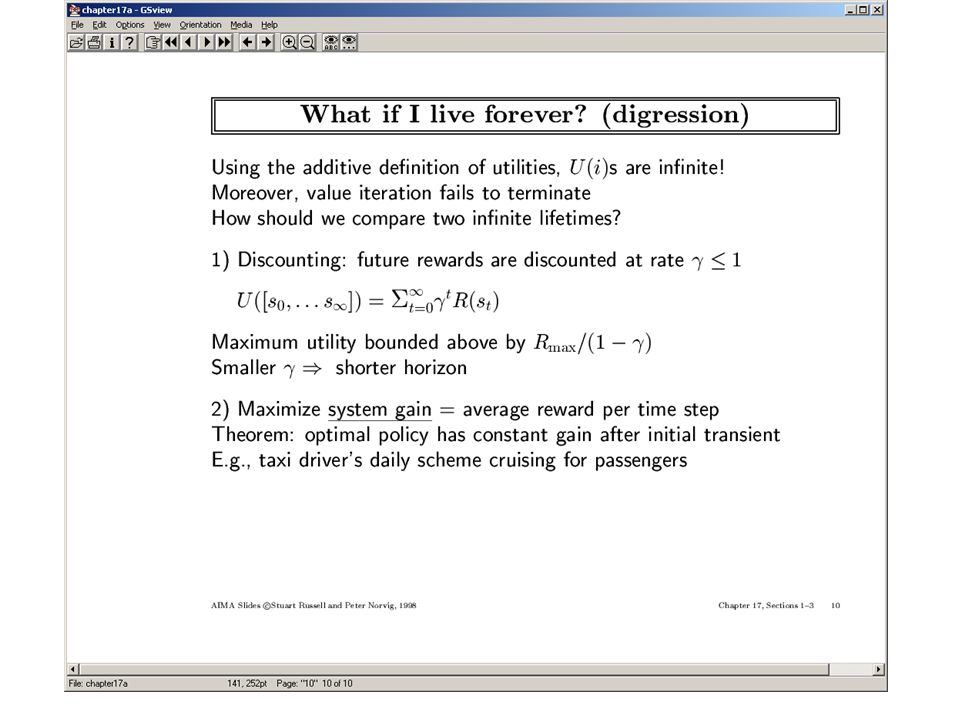
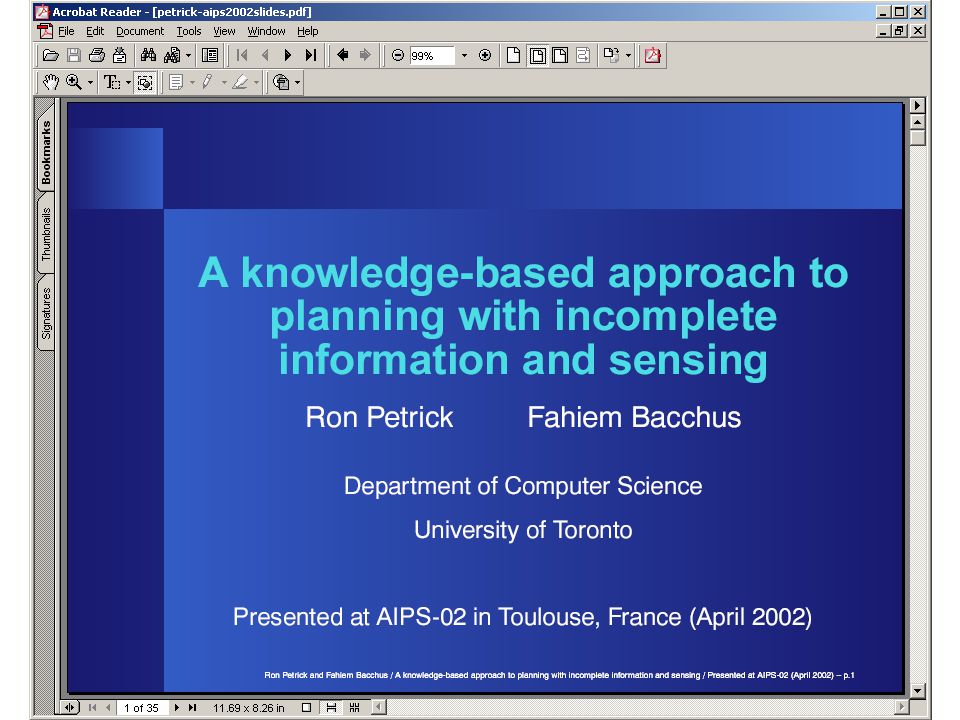
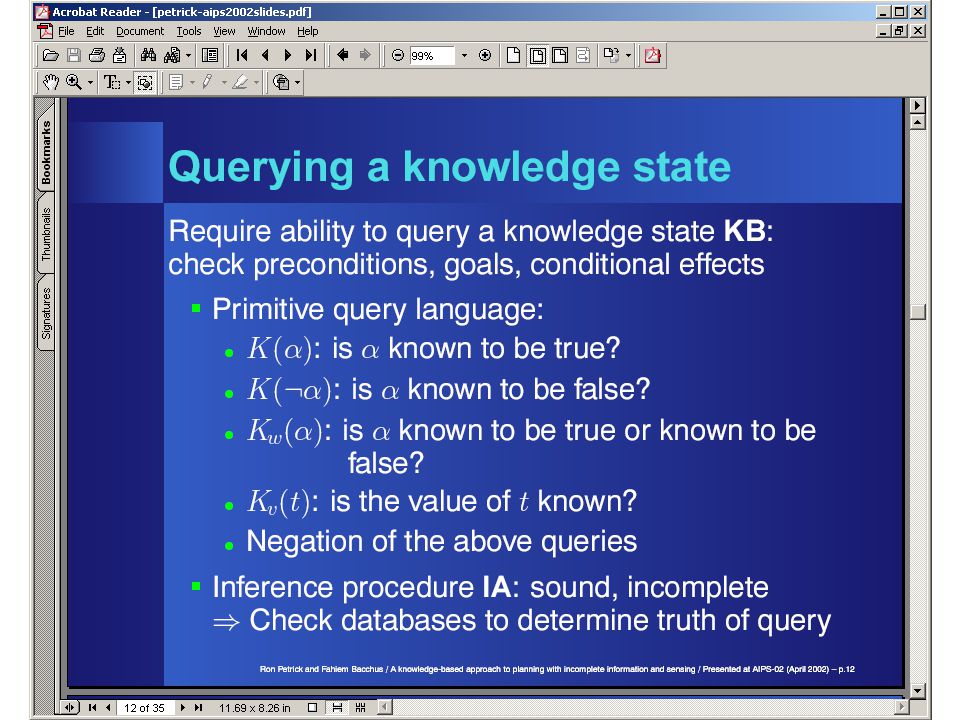
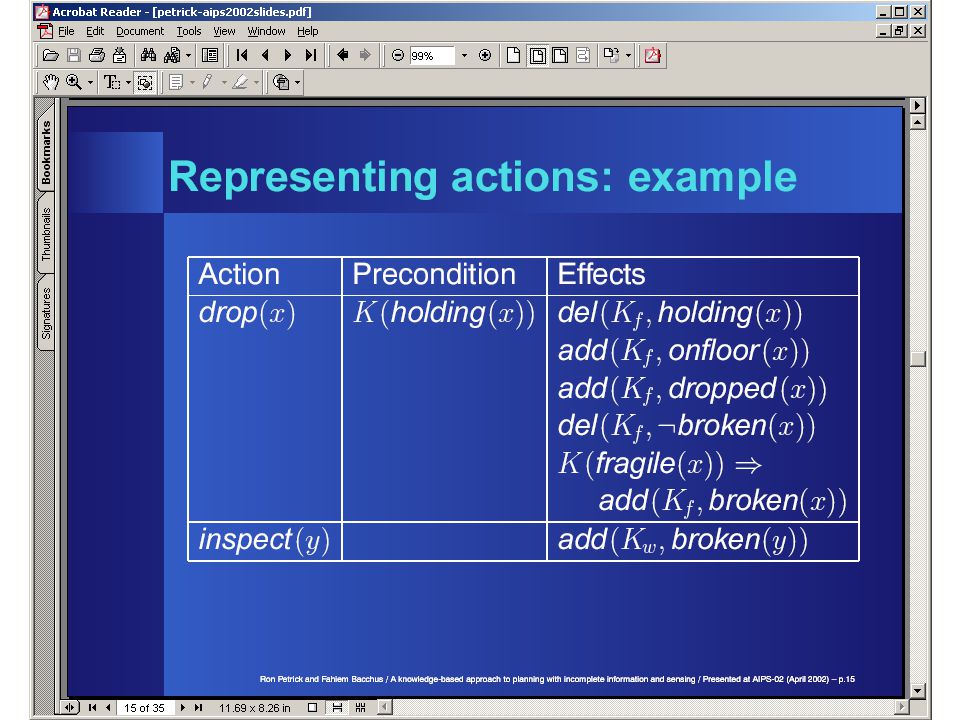
Cost models of conditional plans The execution cost of a conditional plan is Cost of O5 + [Prob(p=T)* {cost of A1 + A3} + Prob(p=F)*{cost of A2 +A3} ] Can take max(cost A1+A3; cost A2+A3 ) The planning cost of a conditional plan is however is proportional to the total size of the plan (num actions) O5:p? A1 A3 A2 Y N O5:p? A1 A2 Y N Need to estimate cost of leaf belief states
![Cost models of conditional plans The execution cost of a conditional plan is Cost of O5 + [Prob(p=T)* {cost of A1 + A3} + Prob(p=F)*{cost of A2 +A3} ] Can take max(cost A1+A3; cost A2+A3 ) The planning cost of a conditional plan is however is proportional to the total size of the plan (num actions) O5:p.](http://images.slideplayer.com/16/5208357/slides/slide_28.jpg "A1 A3 A2 Y N O5:p. A1 A2 Y N Need to estimate cost of leaf belief states.")
42
Similar processing can be done for regression (PO planning is nothing but least-committed regression planning)
")
43
Sensing: General observations Sensing can be thought in terms of Speicific state variables whose values can be found OR sensing actions (with preconditions and causative effects) that evaluate truth of some boolean formula over the state variables. Sense(p) ; Sense(pV(q&r)) A general action may have both causative effects and sensing effects Sensing effect changes the agent’s knowledge, and not the world Causative effect changes the world (and may give certain knowledge to the agent) A pure sensing action only has sensing effects; a pure causative action only has causative effects. The recent work on conditional planning has considered mostly simplistic sensing actions that have no preconditions and only have pure sensing effects. When applied to a belief state, the sensing effects of an action wind up reducing the cardinality of that belief state basically by removing all states that are not consistent with the sensed effects Sensing actions introduce branches into the plans If you apply Sense-A? to a belief state B, you get a partition of B: B A and B ~A You will have to make a plan for both the branches. And/Or search in the space of belief states
 ; Sense(pV(q&r)) A general action may have both causative effects and sensing effects Sensing effect changes the agent’s knowledge, and not the world Causative effect changes the world (and may give certain knowledge to the agent) A pure sensing action only has sensing effects; a pure causative action only has causative effects. The recent work on conditional planning has considered mostly simplistic sensing actions that have no preconditions and only have pure sensing effects. When applied to a belief state, the sensing effects of an action wind up reducing the cardinality of that belief state basically by removing all states that are not consistent with the sensed effects Sensing actions introduce branches into the plans If you apply Sense-A. to a belief state B, you get a partition of B: B A and B ~A You will have to make a plan for both the branches. And/Or search in the space of belief states.")
44
Sensing: More things under the mat Sensing extends the notion of goals too. Check if Rao is awake vs. Wake up Rao Presents some tricky issues in terms of goal satisfaction…! Handling quantified effects and preconditions in the presence of sensing actions Rm* can satisfy the effect forall files remove(file); without KNOWING what are the files in the directory! Sensing actions can have preconditions (as well as other causative effects) The problem of OVER-SENSING (Sort of like the initial driver; also Sphexishness) [XII/Puccini project] Handling over-sensing using local-closedworld assumptions Listing a file doesn’t destroy your knowledge about the size of a file; but compressing it does. If you don’t recognize it, you will always be checking the size of the file after each and every action A general action may have both causative effects and sensing effects Sensing effect changes the agent’s knowledge, and not the world Causative effect changes the world (and may give certain knowledge to the agent) A pure sensing action only has sensing effects; a pure causative action only has causative effects. The recent work on conditional planning has considered mostly simplistic sensing actions that have no preconditions and only have pure sensing effects. Sensing has cost!
; without KNOWING what are the files in the directory. Sensing actions can have preconditions (as well as other causative effects) The problem of OVER-SENSING (Sort of like the initial driver; also Sphexishness) [XII/Puccini project] Handling over-sensing using local-closedworld assumptions Listing a file doesn’t destroy your knowledge about the size of a file; but compressing it does. If you don’t recognize it, you will always be checking the size of the file after each and every action A general action may have both causative effects and sensing effects Sensing effect changes the agent’s knowledge, and not the world Causative effect changes the world (and may give certain knowledge to the agent) A pure sensing action only has sensing effects; a pure causative action only has causative effects. The recent work on conditional planning has considered mostly simplistic sensing actions that have no preconditions and only have pure sensing effects. Sensing has cost!.")
45
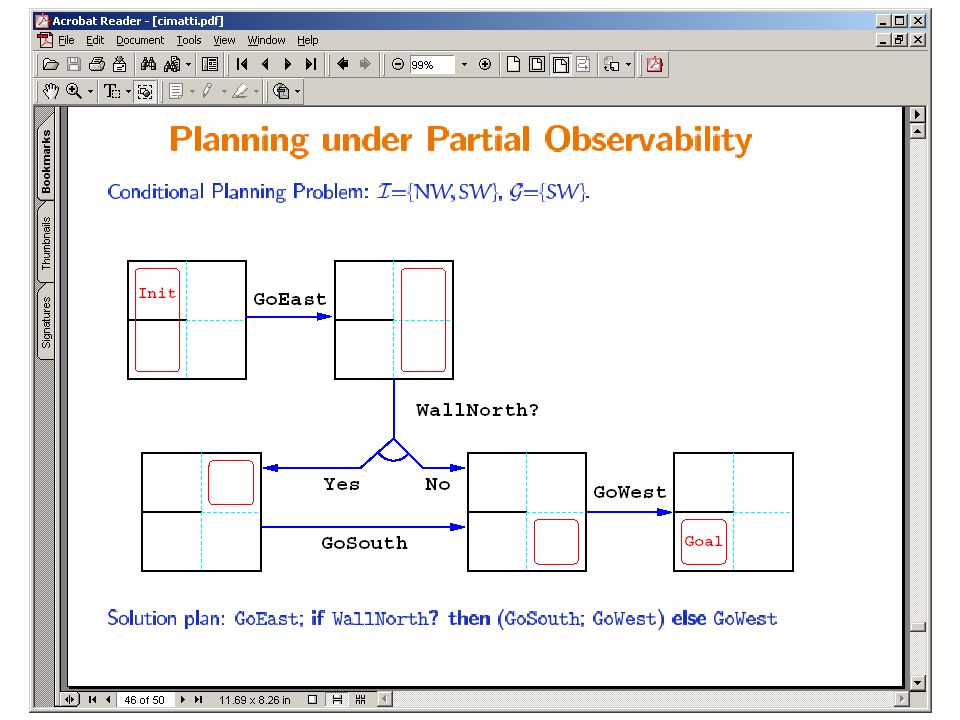
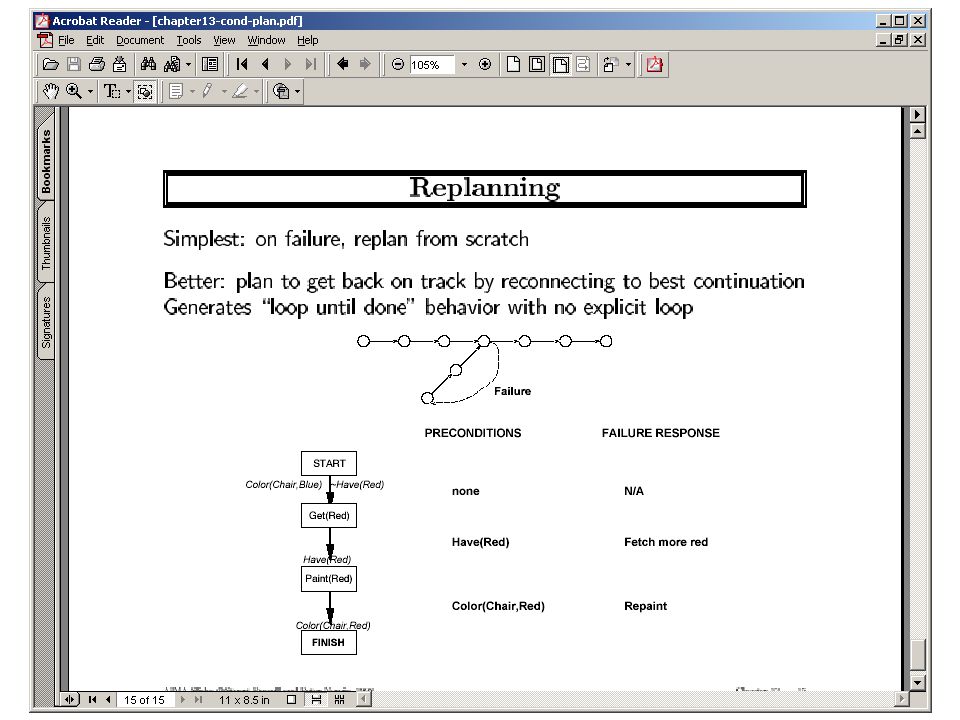
Sensing: Limited Contingency planning In many real-world scenarios, having a plan that works in all contingencies is too hard An idea is to make a plan for some of the contingencies; and monitor/Replan as necessary. Qn: What contingencies should we plan for? The ones that are most likely to occur…(need likelihoods) Qn: What do we do if an unexpected contingency arises? Monitor (the observable parts of the world) When it goes out of expected world, replan starting from that state.
 Qn: What do we do if an unexpected contingency arises. Monitor (the observable parts of the world) When it goes out of expected world, replan starting from that state..")
47
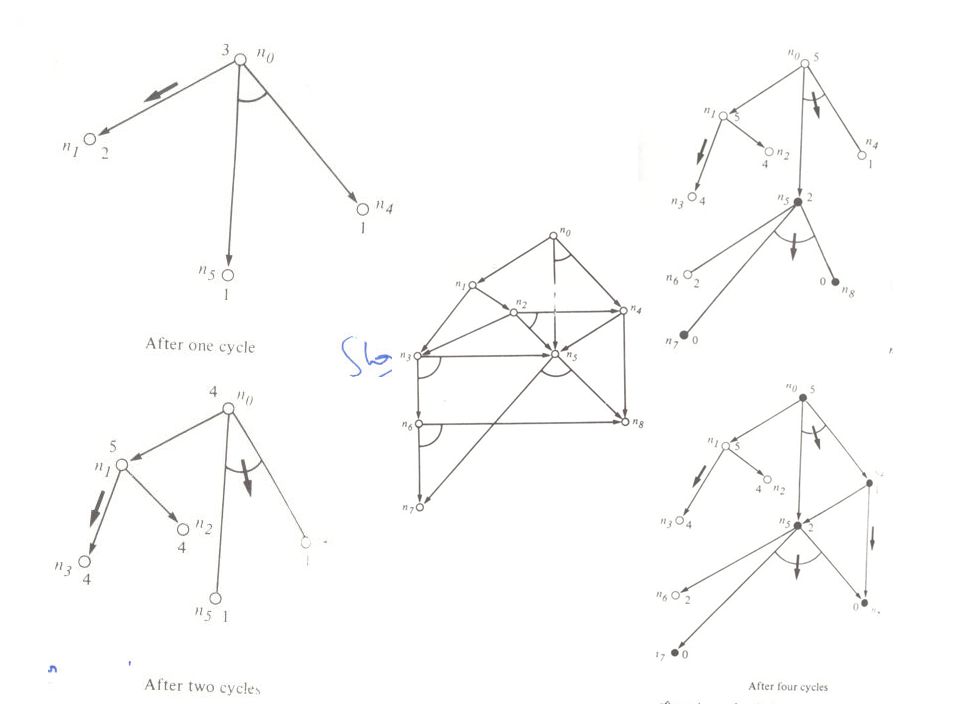
“Triangle Tables”

57
NOT used beyond this point

Similar presentations














 R&N: Chap. 12, Sect 12.3-5 (+ Chap. 10, Sect 10.7)>")







![1 Graphplan José Luis Ambite * [* based in part on slides by Jim Blythe and Dan Weld]](/12/3386758/big_thumb.jpg "1 Graphplan José Luis Ambite * [* based in part on slides by Jim Blythe and Dan Weld]>")





