Download presentation
Presentation is loading. Please wait.

1
Feature-based 3D Morphing based on Geometrically Constrained Sphere Mapping Optimization
Theodoros Athanasiadis Ioannis Fudos Department of Computer Science University of Ioannina, Greece

2
A novel editing paradigm
Initial motivation: make CAD design process accessible to users with no previous CAD/CAM software experience. How? Morphing Mimic the way an artist shapes a sculpture. Start from a volume or object that is close to the intended target and iteratively shaping (morphing) its parts to finally render what the artist had in mind. Final Goal: To offer a novel editing paradigm for CAD models beyond traditional CAD editing of mechanical parts.
 its parts to finally render what the artist had in mind. Final Goal: To offer a novel editing paradigm for CAD models beyond traditional CAD editing of mechanical parts.")
3
A novel editing paradigm
Issues that arise: Accuracy: We may need to enforce geometric constraints to ensure the intended accuracy. Thus, we need a morphing technique that can be combined with other geometric constraints. Robustness: The morphing process has to be robust, with no in- between invalid morphs. Local control: Compatibility with feature-based design.

4
A novel editing paradigm
Issues that arise: Support user-defined constraints: Feasible. In some cases we have managed to incorporate in the morphing process. Work in progress. Efficiency: Needs to be addressed more carefully to support interactivity.

5
Introduction Goal: unsupervised robust 3D morphing of arbitrary genus-0 polyhedral objects. Based on a sphere mapping process that maintains the correspondence among the initial polygons and the mapped ones while preserving topology and connectivity. A fully automated feature-based technique that matches surface areas (feature regions) with similar morphological characteristics between the two morphed objects and performs morphing according to this feature region correspondence list. 5
 with similar morphological characteristics between the two morphed objects and. performs morphing according to this feature region correspondence list. 5.")
6
Talk Overview Feature Based Morphing for CAD Introduction
Topology preserving mapping on the 3D sphere Surface correspondence and interpolation Feature detection, matching, mapping and morphing Examples and performance evaluation

7
Morphing Overview An initial bijective mapping is computed for each object on the unit sphere with either thermal conduction or laplacian smoothing. The Initial mapping optimized by using constraints and a target function. The projections are combined and a merged topology is computed. The merged topology is mapped back to the original models with the use of barycentric coordinates. The models are interpolated on the GPU (linear interpolation may be used).
.")
8
Topology Preserving Mapping on the 3D Sphere
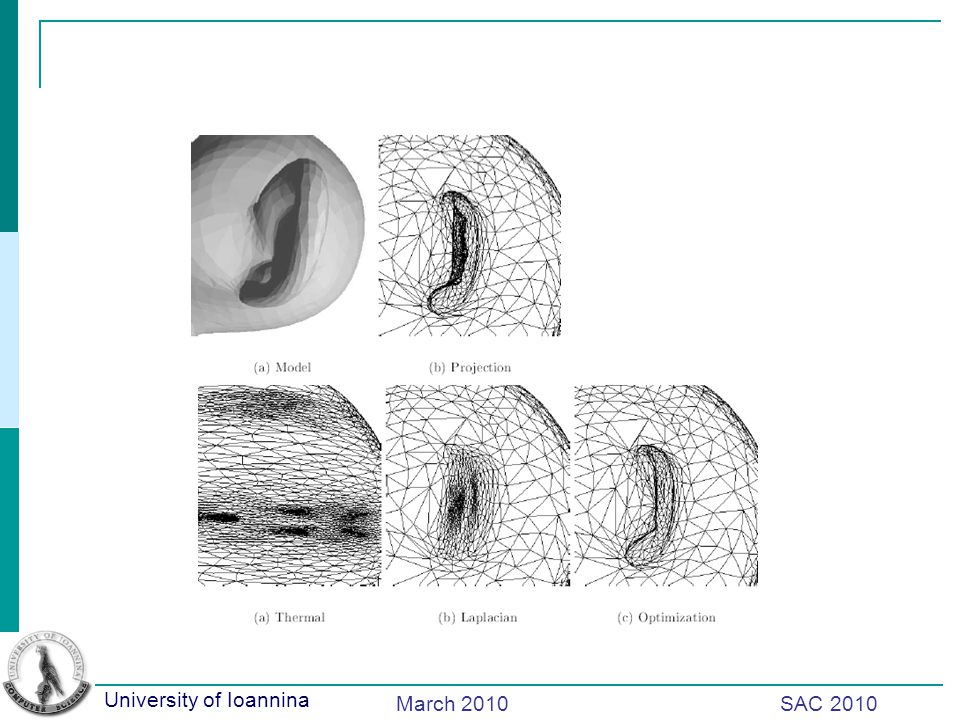
Initial mapping using (i) thermal conduction (ii) laplacian smoothing Initial mapping optimized by using constraints and a target function.
 thermal conduction (ii) laplacian smoothing. Initial mapping optimized by using constraints and a target function.")
9
Initial Mapping by Laplacian Smoothing
Map each vertex on the unit sphere: Use iteratively the following area weighted version of laplacian smoothing on the unit sphere: 5 Iteration intervals 9

10
Sphere Mapping Optimization
Constraints: keep on unit sphere maintain topology Target function for optimization:

11
Sphere Mapping Optimization
Final result of mapping the Blender monkey. Initial characteristics are preserved

12
Talk Overview Feature Based Morphing for CAD Introduction
Topology preserving mapping on the 3D sphere Surface correspondence and interpolation Feature detection, matching, mapping and morphing Examples and performance evaluation

13
Surface Correspondence and Interpolation
Deriving the merged topology Linear or other more appropriate interpolation. Implementation of the GPU for real time morph animation. The user may easily select the appropriate morph.

14
Talk Overview Feature Based Morphing for CAD Introduction
Topology preserving mapping on the 3D sphere Surface correspondence and interpolation Feature detection, matching, mapping and morphing Examples and performance evaluation

15
Feature-based Morphing
Use user defined CAD features or detect feature regions of potential interest For automatic detection we use concavity intensity variations and normal vector rapid changes.

16
Feature-based Morphing
We build an adjacency graph for the feature regions, the edges are labeled by the geodesic distances of the centroids of the feature regions. Then we eliminate edges with large geodesic distances. Small regions that can contribute to noise are merged.

17
Feature-based Morphing
Original graph of first head mesh Reduced graph

18
Feature-based Morphing
Original graph of first head mesh Reduced graph

19
An example of detecting feature regions in two dead meshes.
Feature-based Morphing Match the three highest degree nodes and align the models. The remaining graph nodes are matched based on their degree, distance and covered area similarity: A list of feature point pairs is extracted Feature region matching Feature point matching An example of detecting feature regions in two dead meshes.

20
Feature-based Morphing
Optimized mapping for one object is performed as before, for the other we go on as follows: Constraints: keep on unit sphere maintain topology preserve edge length Target function for optimization:

21
Feature-based Morphing Algorithm Overview
Initial Projection of the first model Initial Projection of the second model NL Optimization NL Optimization Feature NL Optimization Merged Topology perform material, normals etc calculations in the GPU each frame

22
Talk Overview Feature Based Morphing for CAD Introduction
Topology preserving mapping on the 3D sphere Surface correspondence and interpolation Feature detection, matching, mapping and morphing Examples and performance evaluation

23
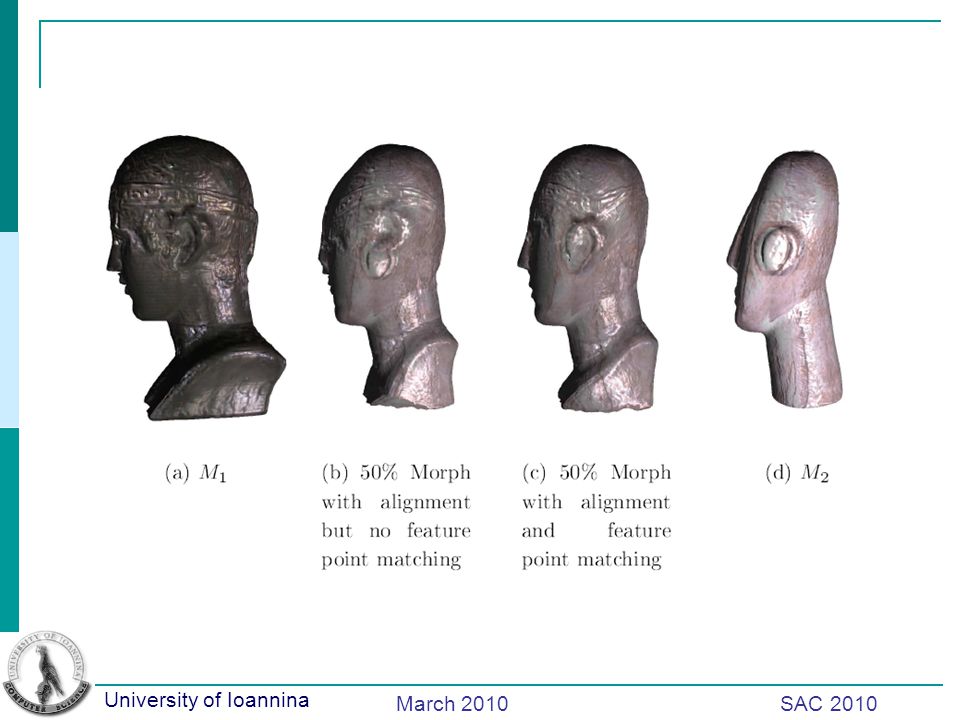
Simple Morphing vs. Feature-based Morphing

24
Examples and Performance Evaluation
Morphing with 3D alignment and feature point matching.

25
Examples and Performance Evaluation
Morphing with alignment but no feature point matching: fish (4994 faces) to duck (1926 faces), merged topology has faces. Morphing with alignment and feature point matching: fish (4994 faces) to duck (1926 faces), merged topology has faces.
 to duck (1926 faces), merged topology has faces. Morphing with alignment and feature point matching: fish (4994 faces) to duck (1926 faces), merged topology has faces.")
27
Demo Video: Morphing

28
Examples and Performance Evaluation
Optimization is too slow. Solutions: GPU implementation (open) Simple morphing is ok, since mapping may be part of the representation. In feature-based morphing it has to be computed for each pair of objects.
 Simple morphing is ok, since mapping may be part of the representation. In feature-based morphing it has to be computed for each pair of objects.")
29
Conclusions Novel approach to morphing that provides a robust, universal, easy to implement method for structural 3D morphing between genus-0 polyhedra. Can be generalized to non genus-0 objects (previous approaches are applicable to our technique). Slow mapping optimization phase. Method is compatible with feature-based CAD models. Allows for editing of free form CAD models. Work in progress: combine with user define constraints (intra feature constraints), use user defined constraints to perform matching among features of different CAD models, utilize feature hierarchy.
. Slow mapping optimization phase. Method is compatible with feature-based CAD models. Allows for editing of free form CAD models. Work in progress: combine with user define constraints (intra feature constraints), use user defined constraints to perform matching among features of different CAD models, utilize feature hierarchy.")
30
Thank you

31
The town of Ioannina For more,

32
University of Ioannina
University of Ioannina, Greece, Department of Computer Science, Distributed Management of Data Lab,

33
Research group (Computer Graphics and CAD)
Vicky Stamati, PhD Postdoc, Reverse engineering, CAD Methods for Jewelry Design Ioannis Kyriazis, PhD student, Reverse Engineering, Collaborative Graphics Systems Theodoros Athanasiadis, PhD student, Feature-based Morphing for CAD Dimitris Markouzis, PhD student, Geometric Constraints for VLSI Design Andreas Vasilakis, PhD Student, Animation, Rigid Skinning, Skeleton Extraction George Antonopoulos, MSc student, CAD Methods for Jewelry Reconstruction and Editing. The group is part of Distributed Management of Data Lab,

34
Collaborators Christoforos Nikou, Computer Vision
Leonidas Palios, Computational Geometry G. Tsiatouhas, VLSI Testing K. Chrysovalantis, VLSI Design and Testing Apostolos Zarras, Middleware Evaggelia Pitoura, Distributed Data Management

35
Level of Detail with Morphing
Motivation : Morphing techniques can be used to do linear interpolation between the two closest level of details (like trilinear filtering for textures). Advantages Each level of detail can have a completely different geometric structure. Additionally remeshing techniques can be used to further cut down the number of polygons. The next lod can be a totally different shape. For example, a high poly house model can be just a box in the lowest level of detail. This can be used to achieve interesting visual effects. The level of details can greatly differ, making a vast difference in the poly count by the use of an inferior level of detail. Fully accelerated by GPU techniques. Drawbacks The morphed mesh usually has more polygons (less than 25% increase) Only closed Genus-0 objects can be handled currently (possibility of extension with additional cost)
. Advantages. Each level of detail can have a completely different geometric structure. Additionally remeshing techniques can be used to further cut down the number of polygons. The next lod can be a totally different shape. For example, a high poly house model can be just a box in the lowest level of detail. This can be used to achieve interesting visual effects. The level of details can greatly differ, making a vast difference in the poly count by the use of an inferior level of detail. Fully accelerated by GPU techniques. Drawbacks. The morphed mesh usually has more polygons (less than 25% increase) Only closed Genus-0 objects can be handled currently (possibility of extension with additional cost)")
36
Lod Example Level 0 t = 0.33 t = 0.66 Level 1
A high poly mesh (12 K triangles) left, and a low poly mesh (500 triangles) right. The middle model is the linear blend computed automatically with t = 0.5. Original models produced with blender software. Real time morphing in the vertex shader, left and right images are the original models. Level t = t = Level 1
 left, and a low poly mesh (500 triangles) right. The middle model is the linear blend computed automatically with t = 0.5. Original models produced with blender software. Real time morphing in the vertex shader, left and right images are the original models. Level 0 t = 0.33 t = 0.66 Level 1.")
37
Lod Example Detail Level 0 t = 0.33 t = 0.66 Level 1
Close up of the morphing sequence reveals the smooth transition from the high polygon model to the low polygon one. Level t = t = Level 1

Similar presentations


 and g() such that the images are best.>")









 Hugues Hoppe (Microsoft Research)>")




 Damian Schofield.>")

