Download presentation
Presentation is loading. Please wait.

1
Tutorial 6: Mechanism Fundermentals
Zhengjian, XU Oct 15, 2008

2
Fundermentals: Design of Mechinary
Mobility: Degree of Freedom (DOF), In 2D mechanism every rigid body has 3 DOF. Link: A Rigid body in the mechinary system Joint (Kinematic Pair) Connect between different Links, the joints can restrain some DOF of the links.
, In 2D mechanism every rigid body has 3 DOF. Link: A Rigid body in the mechinary system. Joint (Kinematic Pair) Connect between different Links, the joints can restrain some DOF of the links.")
3
Analysis of the mobility (DOF)
2D mechanism Where: M is the DOF of the mechanism N is number of links including the ground J1 is number of 1 DOF joints J2 is number of 2 DOF joints 3D mechanism

4
Examples N=6 J1=7 J2=1 M=0 (b) N=3 J1=2 J2=1 M= 1 (c) N=4 J1=4 J2=0
(d) N=7 J1=7 J2= 1 M=3
 N=7. J1=7. J2= 1. M=3.")
5
Classification of four-bar linkage
Grashof condition Where: L: length of shortest link S: length of longest link P: length of one remaining link Q: the length of another remaining link

6
Classification of four-bar linkage

7
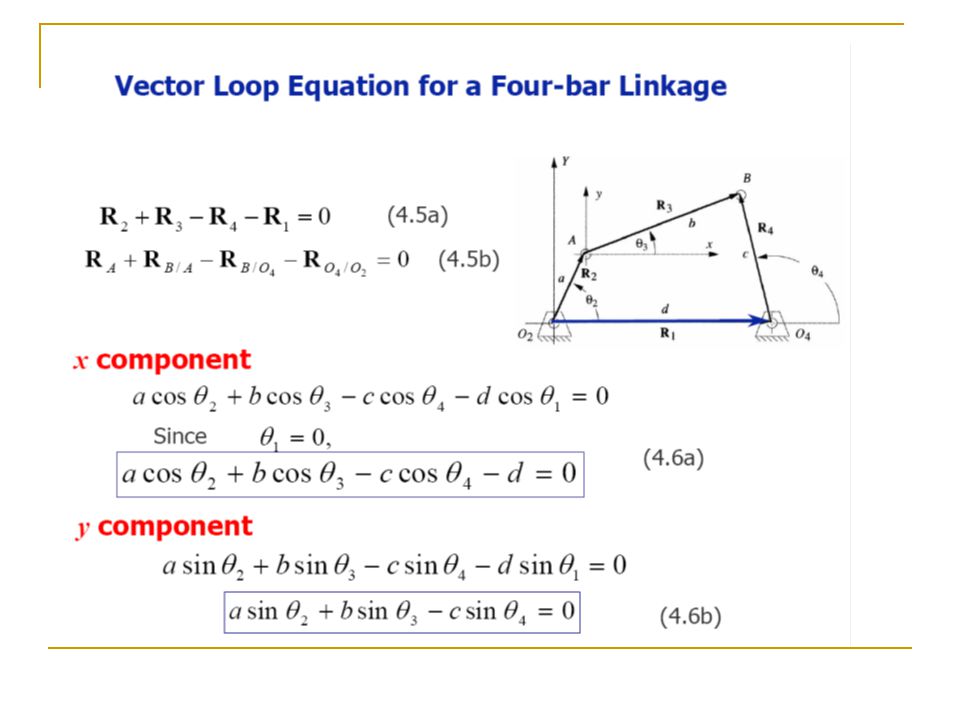
Position analysis of 4-bar linkage: graphical method
2=45° A 3 4 O4 O2 B2

8
Position analysis of 4-bar linkage: graphical method
2=45° A O2 4 3 B2

10
Position analysis for Crank-Rocker mechanism
The calculation of out-put angle

11
Transmission angle

13
Example Given L1=12 ,L2=4, L3=8, L4=9;
(1) Calculate range of output angle (2) Calculate range of the transmission angle
 Calculate range of output angle. (2) Calculate range of the transmission angle.")
14
(1) , S=4, L=11, Q=9, P=8; therefore S+L<Q+P
(2) a=4, b=9, c=8, d=11 B b c O1 (2.1) a O2 A B (2.2) b A c a d O1 O2
 a=4, b=9, c=8, d=11. B. b. c. O1. (2.1) a. O2. A. B. (2.2) b. A. c. a. d. O1. O2.")
15
Transmission angle (3.1) (3.2) Two limited status: B b A a O1 O2 B b c
 (3.2) Two limited status: B b A a O1 O2 B b c")
17
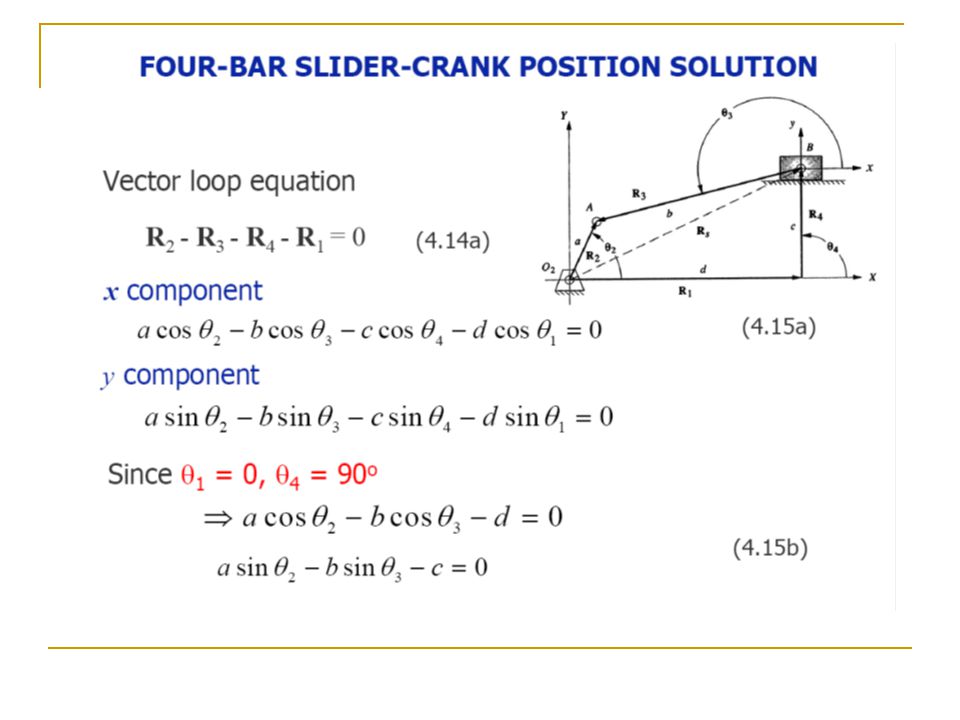
Four-Bar slider-crank mechanism
The output range:

18
Inverted slider-crank mechanism

Similar presentations










 An instant center.>")









