Download presentation
Presentation is loading. Please wait.

1
Multiple View Geometry
Marc Pollefeys University of North Carolina at Chapel Hill Modified by Philippos Mordohai

2
Tutorial outline Image formation
2-D and 3-D projective geometry and transformations Finite perspective camera model Parameter estimation and RANSAC Epipolar geometry and the fundamental matrix 3-D reconstruction (stratification) Image rectification Feature matching Self-calibration
 Image rectification. Feature matching. Self-calibration.")
3
Outline Perspective projection 3D projective geometry
Parameter estimation Epipolar geometry and the fundamental matrix 3D reconstruction and self-calibration

4
Visual 3D models from images and video
What can be achieved? unknown scene unknown camera Scene (static) camera unknown motion automatic modelling Visual model
 camera. unknown. motion. automatic. modelling. Visual model.")
5
(Pollefeys et al. ICCV’98;
… Pollefeys et al.’IJCV04)
")
6
Perspective projection
Linear equations (in homogeneous coordinates)
")
7
Homogeneous coordinates
2-D points represented as 3-D vectors (x y 1)T 3-D points represented as 4-D vectors (X Y Z 1)T Equality defined up to scale (X Y Z 1)T ~ (WX WY WZ W)T Useful for perspective projection makes equations linear C m M1 M2
T. 3-D points represented as 4-D vectors (X Y Z 1)T. Equality defined up to scale. (X Y Z 1)T ~ (WX WY WZ W)T. Useful for perspective projection makes equations linear. C. m. M1. M2.")
8
The pinhole camera

9
Effects of perspective projection
Colinearity is invariant Parallelism is not preserved

10
Intrinsic parameters Camera deviates from pinhole Usually: or s: skew
fx ≠ fy: different magnification in x and y (cx cy): optical axis does not pierce image plane exactly at the center Usually: rectangular pixels: square pixels: principal point known:
: optical axis does not pierce image plane exactly at the center. Usually: rectangular pixels: square pixels: principal point known:")
11
Extrinsic parameters Scene motion Camera motion

12
Projection matrix Mapping from 2-D to 3-D is a function of internal and external parameters

13
Ideal points and the line at infinity
Intersections of parallel lines Example tangent vector normal direction WEEK move camera stuff after this Ideal points Line at infinity Note that in P2 there is no distinction between ideal points and others

14
Duality in 2D Duality principle:
To any theorem of 2-dimensional projective geometry there corresponds a dual theorem, which may be derived by interchanging the role of points and lines in the original theorem

15
Outline Perspective projection 3D projective geometry
Parameter estimation Epipolar geometry and the fundamental matrix 3D reconstruction and self-calibration

16
3D Projective Geometry Points, lines, planes and quadrics
Transformations П∞, ω∞ and Ω ∞

17
3D points 3D point in R3 in P3 projective transformation
(4x4-1=15 dof)
")
18
Planes 3D plane Transformation Euclidean representation
Dual: points ↔ planes, lines ↔ lines

19
Planes from points Or implicitly from coplanarity condition
(solve as right nullspace of ) Or implicitly from coplanarity condition
 Or implicitly from coplanarity condition.")
20
Hierarchy of transformations
Projective 15dof Intersection and tangency Parallellism of planes, Volume ratios, centroids, The plane at infinity π∞ Affine 12dof Similarity 7dof The absolute conic Ω∞ Euclidean 6dof Volume

21
The plane at infinity The plane at infinity π is a fixed plane under a projective transformation H iff H is an affinity canical position contains directions two planes are parallel line of intersection in π∞ line // line (or plane) point of intersection in π∞
 point of intersection in π∞")
22
The absolute conic The absolute conic Ω∞ is a (point) conic on π. In a metric frame: or conic for directions: (with no real points) The absolute conic Ω∞ is a fixed conic under the projective transformation H iff H is a similarity Ω∞ is only fixed as a set Circles intersect Ω∞ in two points Spheres intersect π∞ in Ω∞
 The absolute conic Ω∞ is a fixed conic under the projective transformation H iff H is a similarity. Ω∞ is only fixed as a set. Circles intersect Ω∞ in two points. Spheres intersect π∞ in Ω∞")
23
Transformation of lines and conics
For a point transformation Transformation for lines Transformation for conics Transformation for dual conics

24
Outline Perspective projection 3D projective geometry
Parameter estimation Epipolar geometry and the fundamental matrix 3D reconstruction and self-calibration

25
Parameter estimation 2D homography 3D to 2D camera projection
Given a set of (xi,xi’), compute H (xi’=Hxi) 3D to 2D camera projection Given a set of (Xi,xi), compute P (xi=PXi) Fundamental matrix Given a set of (xi,xi’), compute F (xi’TFxi=0) Trifocal tensor Given a set of (xi,xi’,xi”), compute T
, compute H (xi’=Hxi) 3D to 2D camera projection. Given a set of (Xi,xi), compute P (xi=PXi) Fundamental matrix. Given a set of (xi,xi’), compute F (xi’TFxi=0) Trifocal tensor. Given a set of (xi,xi’,xi ), compute T.")
26
Number of measurements required
At least as many independent equations as degrees of freedom required Example: 2 independent equations / point 8 degrees of freedom 4x2≥8

27
Algebraic distance DLT minimizes residual vector
partial vector for each (xi↔xi’) algebraic error vector algebraic distance Not geometrically/statistically meaningfull, but given good normalization it works fine and is very fast (use for initialization)
 algebraic error vector. algebraic distance. Not geometrically/statistically meaningfull, but given good normalization it works fine and is very fast (use for initialization)")
28
Geometric distance d(.,.) Euclidean distance (in image)
measured coordinates estimated coordinates true coordinates d(.,.) Euclidean distance (in image) Error in one image e.g. calibration pattern Symmetric transfer error Reprojection error
 Euclidean distance (in image) Error in one image. e.g. calibration pattern. Symmetric transfer error. Reprojection error.")
29
Sampson error between algebraic and geometric error
Vector that minimizes the geometric error is the closest point on the variety to the measurement Sampson error: 1st order approximation of Find the vector that minimizes subject to (Sampson error)
")
30
RANSAC Objective Robust fit of model to data set S which contains outliers Algorithm Randomly select a sample of s data points from S and instantiate the model from this subset. Determine the set of data points Si which are within a distance threshold t of the model. The set Si is the consensus set of samples and defines the inliers of S. If the subset of Si is greater than some threshold T, re-estimate the model using all the points in Si and terminate If the size of Si is less than T, select a new subset and repeat the above. After N trials the largest consensus set Si is selected, and the model is re-estimated using all the points in the subset Si

31
proportion of outliers e
How many samples? Choose t so probability for inlier is α (e.g. 0.95) Or empirically Choose N so that, with probability p, at least one random sample is free from outliers. e.g. p =0.99 proportion of outliers e s 5% 10% 20% 25% 30% 40% 50% 2 3 5 6 7 11 17 4 9 19 35 13 34 72 12 26 57 146 16 24 37 97 293 8 20 33 54 163 588 44 78 272 1177
 Or empirically. Choose N so that, with probability p, at least one random sample is free from outliers. e.g. p =0.99. proportion of outliers e. s. 5% 10% 20% 25% 30% 40% 50%")
32
Outline Perspective projection 3D projective geometry
Parameter estimation Epipolar geometry and the fundamental matrix 3D reconstruction and self-calibration

33
The fundamental matrix F
geometric derivation mapping from 2-D to 1-D family (rank 2)
")
34
The fundamental matrix F
(note: doesn’t work for C=C’ F=0)
")
35
The fundamental matrix F
F is the unique 3x3 rank 2 matrix that satisfies x’TFx=0 for all x↔x’ Transpose: if F is fundamental matrix for (P,P’), then FT is fundamental matrix for (P’,P) Epipolar lines: l’=Fx & l=FTx’ Epipoles: on all epipolar lines, thus e’TFx=0, x e’TF=0, similarly Fe=0 F has 7 d.o.f. , i.e. 3x3-1(homogeneous)-1(rank2) F is a correlation, projective mapping from a point x to a line l’=Fx (not a proper correlation, i.e. not invertible)
, then FT is fundamental matrix for (P’,P) Epipolar lines: l’=Fx & l=FTx’ Epipoles: on all epipolar lines, thus e’TFx=0, x e’TF=0, similarly Fe=0. F has 7 d.o.f. , i.e. 3x3-1(homogeneous)-1(rank2) F is a correlation, projective mapping from a point x to a line l’=Fx (not a proper correlation, i.e. not invertible)")
36
Projective transformation and invariance
Derivation based purely on projective concepts F invariant to transformations of projective 3-space unique not unique canonical form

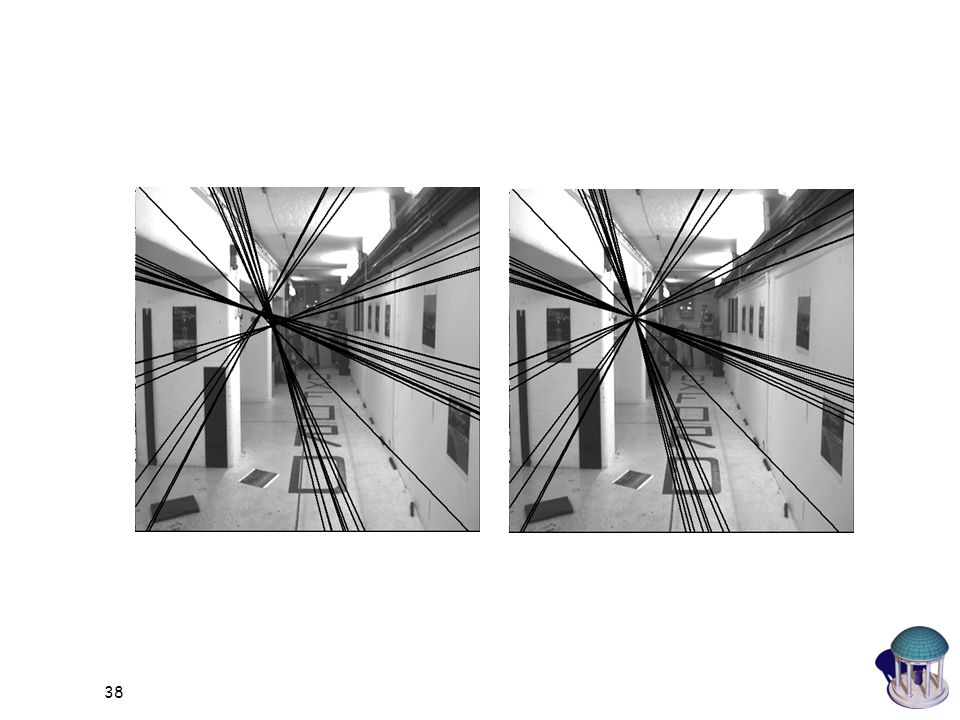
37
The singularity constraint
SVD from linearly computed F matrix (rank 3) Compute closest rank-2 approximation
 Compute closest rank-2 approximation.")
39
The NOT normalized 8-point algorithm
~10000 ~100 1 ! Orders of magnitude difference between column of data matrix least-squares yields poor results

40
The normalized 8-point algorithm
Transform image to ~[-1,1]x[-1,1] (0,500) (1,-1) (0,0) (1,1) (-1,1) (-1,-1) normalized least squares yields good results (Hartley, PAMI´97) (700,500) (0,0) (700,0)
 (1,-1) (0,0) (1,1) (-1,1) (-1,-1) normalized least squares yields good results (Hartley, PAMI´97) (700,500) (0,0) (700,0)")
41
(overparametrized F=[t]xM)
Gold standard Maximum Likelihood Estimation (= least-squares for Gaussian noise) Initialize: normalized 8-point, (P,P‘) from F, reconstruct Xi Parameterize: (overparametrized F=[t]xM) Minimize cost using Levenberg-Marquardt (preferably sparse LM, see book)
![(overparametrized F=[t]xM)](http://slideplayer.com/slide/5103580/16/images/41/%28overparametrized+F%3D%5Bt%5DxM%29.jpg "Gold standard. Maximum Likelihood Estimation. (= least-squares for Gaussian noise) Initialize: normalized 8-point, (P,P‘) from F, reconstruct Xi. Parameterize: (overparametrized F=[t]xM) Minimize cost using Levenberg-Marquardt. (preferably sparse LM, see book)")
42
Automatic computation of F
Interest points Putative correspondences RANSAC (iv) Non-linear re-estimation of F Guided matching (repeat (iv) and (v) until stable)
 Non-linear re-estimation of F. Guided matching. (repeat (iv) and (v) until stable)")
43
Image pair rectification
simplify stereo matching by warping the images Apply projective transformation so that epipolar lines correspond to horizontal scanlines e e map epipole e to (1,0,0) try to minimize image distortion problem when epipole in (or close to) the image
 try to minimize image distortion. problem when epipole in (or close to) the image.")
44
Planar rectification (standard approach) (calibrated) Bring two views
~ image size (calibrated) Distortion minimization (uncalibrated) Bring two views to standard stereo setup (moves epipole to ) (not possible when in/close to image)
 Distortion minimization. (uncalibrated) Bring two views. to standard stereo setup. (moves epipole to ) (not possible when in/close to image)")
45
Polar rectification Polar re-parameterization around epipoles
(Pollefeys et al. ICCV’99) Polar re-parameterization around epipoles Requires only (oriented) epipolar geometry Preserve length of epipolar lines Choose so that no pixels are compressed original image rectified image Works for all relative motions Guarantees minimal image size
 Polar re-parameterization around epipoles. Requires only (oriented) epipolar geometry. Preserve length of epipolar lines. Choose so that no pixels are compressed. original image. rectified image. Works for all relative motions. Guarantees minimal image size.")
46
Polar rectification: example

47
polar rectification: example

48
Outline Perspective projection 3D projective geometry
Parameter estimation Epipolar geometry and the fundamental matrix 3D reconstruction and self-calibration

49
Reconstruction problem
given xi↔x‘i , compute P,P‘ and Xi for all i without additional information possible up to projective ambiguity

50
Outline of reconstruction
Compute F from correspondences Compute camera matrices from F Compute 3D point for each pair of corresponding points computation of F use x‘iFxi=0 equations, linear in coeff. F 8 points (linear), 7 points (non-linear), 8+ (least-squares) (more on this next class) computation of camera matrices use triangulation compute intersection of two backprojected rays
, 7 points (non-linear), 8+ (least-squares) (more on this next class) computation of camera matrices. use. triangulation. compute intersection of two backprojected rays.")
51
Reconstruction ambiguity: similarity

52
Reconstruction ambiguity: projective

53
The projective reconstruction theorem
If a set of point correspondences in two views determine the fundamental matrix uniquely, then the scene and cameras may be reconstructed from these correspondences alone, and any two such reconstructions from these correspondences are projectively equivalent along same ray of P2, idem for P‘2 two possibilities: X2i=HX1i, or points along baseline key result: allows reconstruction from pair of uncalibrated images

54
Stratified reconstruction
Projective reconstruction Affine reconstruction Metric reconstruction

55
Projective to affine theorem says up to projective transformation,
(if D≠0) theorem says up to projective transformation, but projective with fixed p∞ is affine transformation can be sufficient depending on application, e.g. mid-point, centroid, parallellism
 theorem says up to projective transformation, but projective with fixed p∞ is affine transformation. can be sufficient depending on application, e.g. mid-point, centroid, parallellism.")
56
Scene constraints Parallel lines parallel lines intersect at infinity
reconstruction of corresponding vanishing point yields point on plane at infinity 3 sets of parallel lines allow to uniquely determine p∞ remark: in presence of noise determining the intersection of parallel lines is a delicate problem remark: obtaining vanishing point in one image can be sufficient

57
Affine to metric identify absolute conic transform so that
then projective transformation relating original and reconstruction is a similarity transformation in practice, find image of W∞ image w∞ back-projects to cone that intersects p∞ in W∞ * * projection constraints note that image is independent of particular reconstruction

58
vanishing points corresponding to orthogonal directions
Orthogonality vanishing points corresponding to orthogonal directions vanishing line and vanishing point corresponding to plane and normal direction

59
Known internal parameters
rectangular pixels square pixels

60
Same camera for all images
same intrinsics same image of the absolute conic e.g. moving camera given sufficient images there is in general only one conic that projects to the same image in all images, i.e. the absolute conic This approach is called self-calibration transfer of IAC: provides 4 constraints, one more needed

61
Constraints for Reconstruction
Scene constraints Parallellism, vanishing points, horizon, ... Distances, positions, angles, ... Unknown scene no constraints Camera extrinsics constraints Pose, orientation, ... Unknown camera motion no constraints Camera intrinsics constraints Focal length, principal point, aspect ratio & skew Perspective camera model too general some constraints

62
Constraints on intrinsic parameters
Constant e.g. fixed camera: Known e.g. rectangular pixels: square pixels: principal point known:

63
Self-calibration Upgrade from projective structure to metric structure using constraints on intrinsic camera parameters Constant intrinsics Some known intrinsics, others varying Constraints on intrincs and restricted motion (e.g. pure translation, pure rotation, planar motion) (Faugeras et al. ECCV´92, Hartley´93, Triggs´97, Pollefeys et al. PAMI´99, ...) (Heyden&Astrom CVPR´97, Pollefeys et al. ICCV´98,...) (Moons et al.´94, Hartley ´94, Armstrong ECCV´96, ...)
 (Faugeras et al. ECCV´92, Hartley´93, Triggs´97, Pollefeys et al. PAMI´99, ...) (Heyden&Astrom CVPR´97, Pollefeys et al. ICCV´98,...) (Moons et al.´94, Hartley ´94, Armstrong ECCV´96, ...)")
64
The Absolute Conic is a specific imaginary conic on ,
for metric frame or Remember, the absolute conic is fixed under H if, and only if, H is a similarity transformation Image related to intrinsics

65
The Absolute Dual Quadric
(Triggs CVPR´97) Degenerate dual quadric * Encodes both absolute conic and * for metric frame:
 Degenerate dual quadric * Encodes both absolute conic and * for metric frame:")
66
Absolute Dual Quadric and Self-calibration
Eliminate extrinsics from equation Equivalent to projection of dual quadric Abs.Dual Quadric also exists in projective world Transforming world so that reduces ambiguity to metric

67
Constraints on * condition constraint type #constraints m 2m m-1
Zero skew quadratic m Principal point linear 2m Zero skew (& p.p.) Fixed aspect ratio (& p.p.& Skew) m-1 Known aspect ratio (& p.p.& Skew) Focal length (& p.p. & Skew)
 Fixed aspect ratio (& p.p.& Skew) m-1. Known aspect ratio (& p.p.& Skew) Focal length. (& p.p. & Skew)")
68
(Pollefeys et al.,ICCV´98/IJCV´99)
Linear algorithm (Pollefeys et al.,ICCV´98/IJCV´99) Assume everything known, except focal length Yields 4 constraint per image Note that rank-3 constraint is not enforced
 Assume everything known, except focal length. Yields 4 constraint per image. Note that rank-3 constraint is not enforced.")
69
Linear algorithm revisited
(Pollefeys et al., ECCV‘02) Weighted linear equations assumptions
 Weighted linear equations. assumptions.")
70
Projective to metric Compute T from using eigenvalue decomposition of
and then obtain metric reconstruction as

Similar presentations



















 1.Computable from corresponding points.>")