Download presentation
Presentation is loading. Please wait.

1
CPSC 452 Inverse Kinematics Prof. Oussama Khatib, Stanford University Prof. Dezhen Song, Texas A&M University

4
X

10
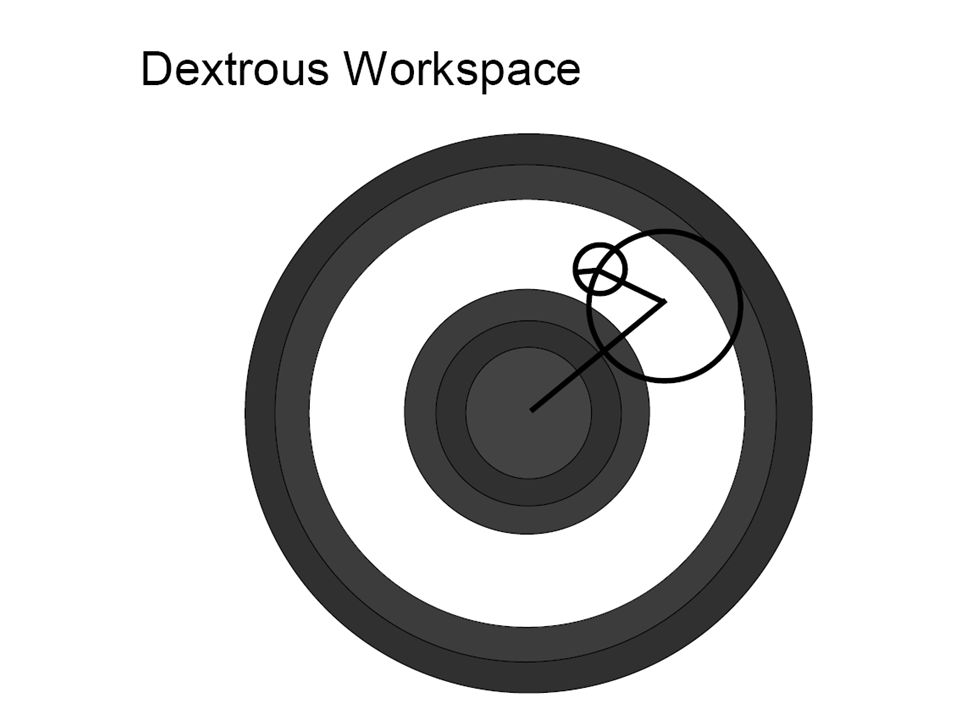
Workspace Reachable Workspace Dexterous Workspace

20
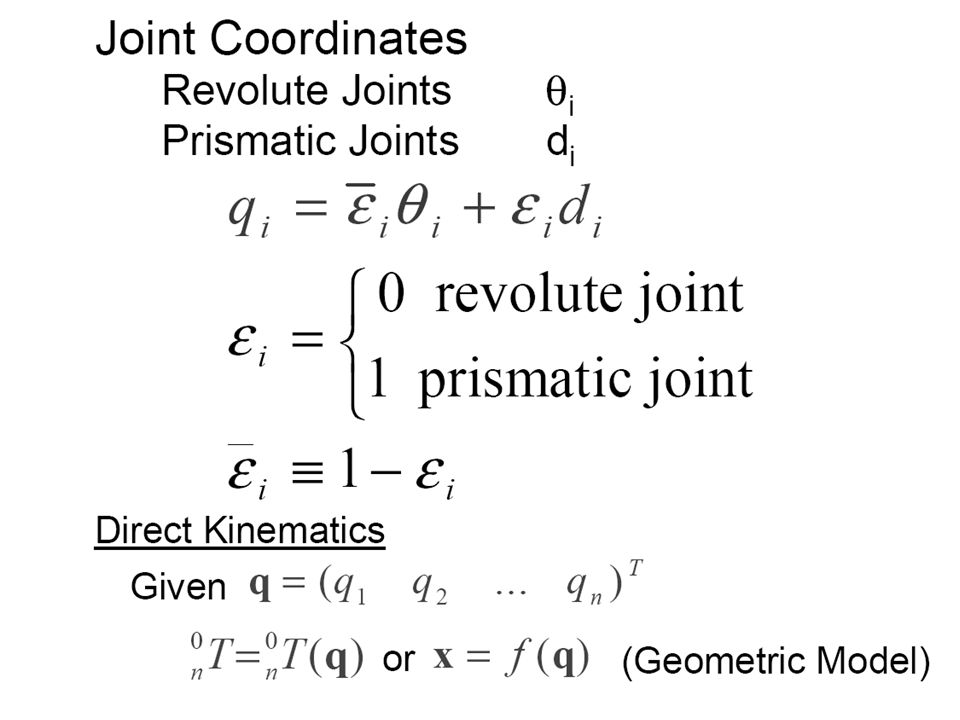
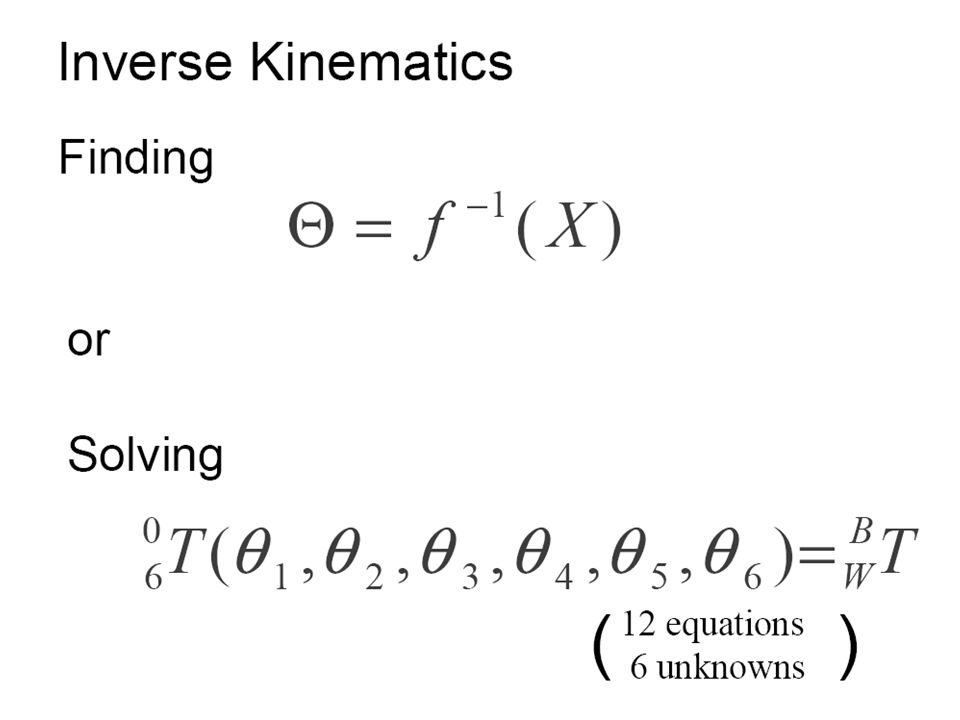
X Given X Find q=( 1, 2, 3 )
")
21
Algebraic Solution The kinematics of the example seen before are: Assume goal point is specified by 3 numbers:

22
Algebraic Solution (cont.) By comparison, we get the four equations: Summing the square of the last 2 equations: From here we get an expression for c 2
 By comparison, we get the four equations: Summing the square of the last 2 equations: From here we get an expression for c 2")
23
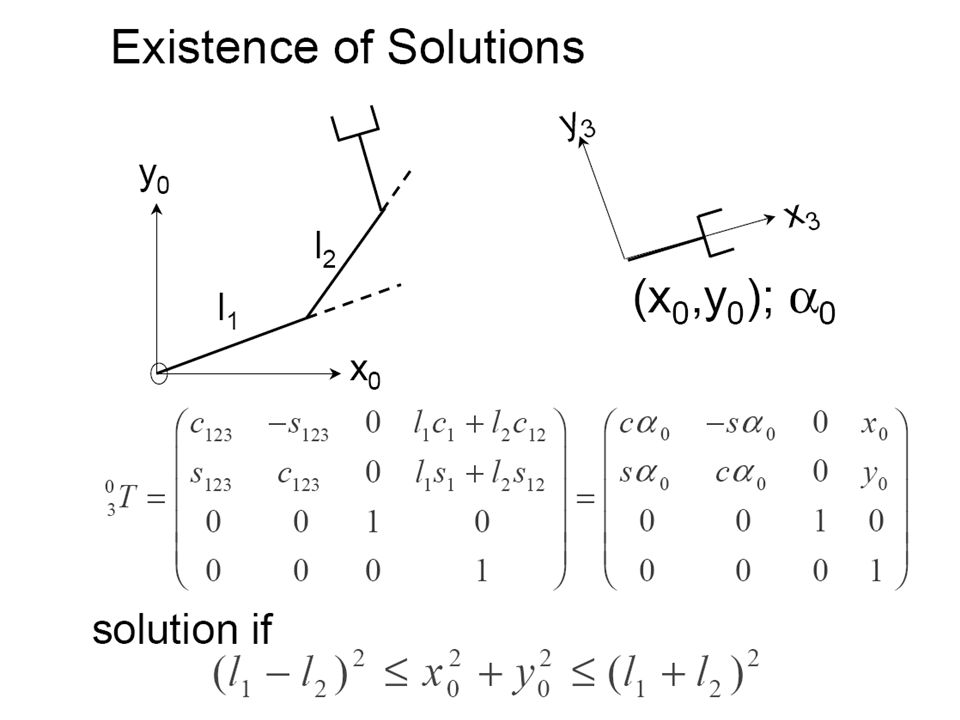
Algebraic Solution (III) When does a solution exist? What is the physical meaning if no solution exists? Two solutions for 2 are possible. Why? Using c 12 =c 1 c 2 -s 1 s 2 and s 12 = c 1 s 2 -c 2 s 1 : where k 1 =l 1 +l 2 c 2 and k 2 =l 2 s 2. To solve these eq s, set r=+ k 1 2 +k 2 2 and =Atan2(k 2,k 1 ).
..")
24
Algebraic Solution (IV) k1k1 k2k2 22 l1l1 l2l2 Then: k 1 =r cos , k 1 =r sin , and we can write: x/r= cos cos 1 - sin sin 1 y/r= cos cos 1 - sin sin 1 or: cos( + 1 ) = x/r, sin( + 1 ) =y/r
 k1k1 k2k2 22 l1l1 l2l2 Then: k 1 =r cos , k 1 =r sin , and we can write: x/r= cos cos 1 - sin sin 1 y/r= cos cos 1 - sin sin 1 or: cos( + 1 ) = x/r, sin( + 1 ) =y/r")
25
Algebraic Solution (IV) Therefore: + 1 = Atan2(y/r,x/r) = Atan2(y,x) and so: 1 = Atan2(y,x) - Atan2(k 2,k 1 ) Finally, 3 can be solved from: 1 + 2 + 3 =
 Therefore: + 1 = Atan2(y/r,x/r) = Atan2(y,x) and so: 1 = Atan2(y,x) - Atan2(k 2,k 1 ) Finally, 3 can be solved from: 1 + 2 + 3 = ")
26
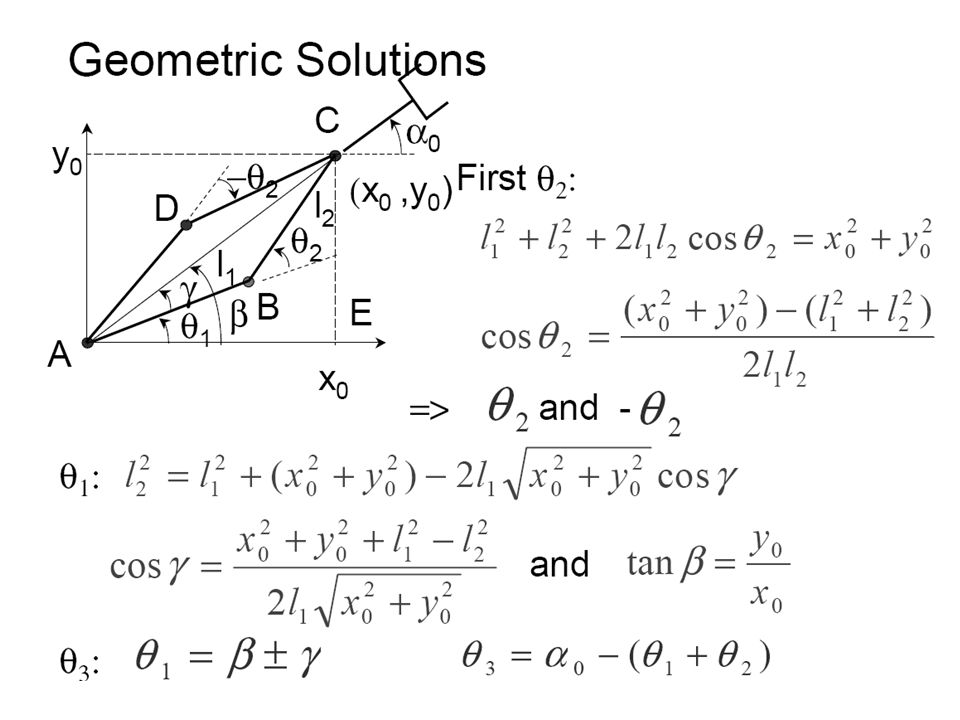
Geometric Solution IDEA: Decompose spatial geometry into several plane geometry problems x y L1L1 L2L2 Applying the “ law of cosines ” : x 2 +y 2 =l 1 2 +l 2 2 - 2l 1 l 2 cos(180+ 2 )
")
Similar presentations


























. Sum formula for cosine cos (x + π) = cos x cos π – sin x sin π Evaluate. = (cos x)(–1)>")

 3x + 7 = 32 - 2x (ii) 3x + 1 = 5x – 13 (iii) 3(5x – 2) = 4(3x + 6) (iv) 3(2x + 1) = 2x + 11 (v) 2(x + 2)>")








 Is a solution to ? B) Is a solution to cos x = sin 2x ?>")




