Download presentation
Presentation is loading. Please wait.

1
Immagini e filtri lineari

2
Image Filtering Modifying the pixels in an image based on some function of a local neighborhood of the pixels 103010 201120 1191 p N(p) 5.7
 5.7")
3
Linear Filtering The output is the linear combination of the neighborhood pixels The coefficients of this linear combination combine to form the “filter-kernel” 130 2102 411 Image 10 10.1 10 Kernel = 5 Filter Output

4
Convolution H7H7 H8H8 H9H9 H4H4 H5H5 H6H6 H1H1 H2H2 H3H3 H9H9 H8H8 H7H7 H6H6 H5H5 H4H4 H3H3 H2H2 H1H1 H1H1 H2H2 H3H3 H4H4 H5H5 H6H6 H7H7 H8H8 H9H9 I1I1 I2I2 I3I3 I4I4 I5I5 I6I6 I7I7 I8I8 I9I9

5
Linear Filtering 000 010 000

6
000 001 000
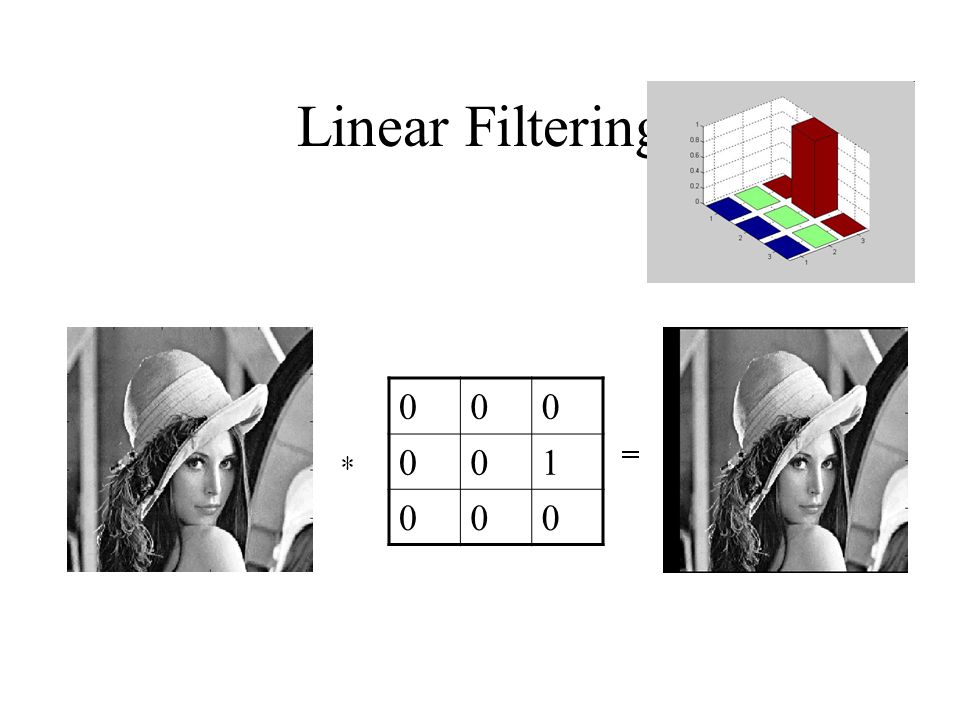
7
111 111 111

8
11111 11111 11111 11111 11111

10
Gaussian Filter

11
Linear Filtering(Gaussian Filter)
")
12
Gaussian Vs Average Gaussian Smoothing Smoothing by Averaging

13
Noise Filtering Gaussian Noise After Gaussian Smoothing After Averaging

14
Noise Filtering Salt & Pepper Noise After Gaussian Smoothing After Averaging

15
Shift Invariant Linear Systems Superposition Scaling Shift Invariance

18
Fourier Transform

19
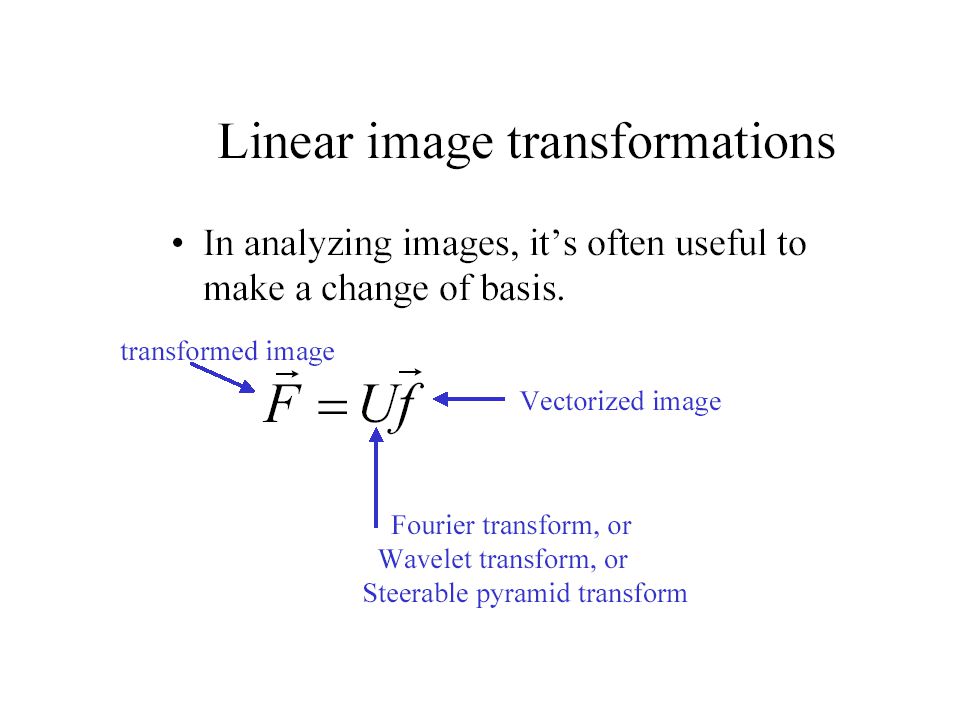
The Fourier Transform Represent function on a new basis –Think of functions as vectors, with many components –We now apply a linear transformation to transform the basis dot product with each basis element In the expression, u and v select the basis element, so a function of x and y becomes a function of u and v basis elements have the form

21
Here u & v are larger than the previous slide Larger than the upper example

23
Cheetah Image Fourier Magnitude (above) Fourier Phase (below)
 Fourier Phase (below)")
24
Zebra Image Fourier Magnitude (above) Fourier Phase (below)
 Fourier Phase (below)")
25
Reconstruction with Zebra phase, Cheetah Magnitude

26
Reconstruction with Cheetah phase, Zebra Magnitude

27
Various Fourier Transform Pairs Important facts –The Fourier transform is linear –There is an inverse FT –if you scale the function’s argument, then the transform’s argument scales the other way. This makes sense --- if you multiply a function’s argument by a number that is larger than one, you are stretching the function, so that high frequencies go to low frequencies –The FT of a Gaussian is a Gaussian. The convolution theorem –The Fourier transform of the convolution of two functions is the product of their Fourier transforms –The inverse Fourier transform of the product of two Fourier transforms is the convolution of the two inverse Fourier transforms

28
Various Fourier Transform Pairs

29
Aliasing Can’t shrink an image by taking every second pixel If we do, characteristic errors appear –In the next few slides –Typically, small phenomena look bigger; fast phenomena can look slower –Common phenomenon Wagon wheels rolling the wrong way in movies Checkerboards misrepresented in ray tracing Striped shirts look funny on colour television

30
Resample the checkerboard by taking one sample at each circle. In the case of the top left board, new representation is reasonable. Top right also yields a reasonable representation. Bottom left is all black (dubious) and bottom right has checks that are too big.
 and bottom right has checks that are too big..")
31
Constructing a pyramid by taking every second pixel leads to layers that badly misrepresent the top layer

32
Sampling in 1D takes a continuous function and replaces it with a vector of values, consisting of the function’s values at a set of sample points. We’ll assume that these sample points are on a regular grid, and can place one at each integer for convenience. Sampling in 1D

33
Sampling in 2D does the same thing, only in 2D. We’ll assume that these sample points are on a regular grid, and can place one at each integer point for convenience. Sampling in 2D

34
Convolution 000 010 000

35
000 001 000

38
Nyquist Theorem In order for a band-limited (i.e., one with a zero power spectrum for frequencies f > B) baseband ( f > 0) signal to be reconstructed fully, it must be sampled at a rate f 2B. A signal sampled at f = 2B is said to be Nyquist sampled, and f =2B is called the Nyquist frequency. No information is lost if a signal is sampled at the Nyquist frequency, and no additional information is gained by sampling faster than this rate.

39
Smoothing as low-pass filtering The message of the NT is that high frequencies lead to trouble with sampling. Solution: suppress high frequencies before sampling –multiply the FT of the signal with something that suppresses high frequencies –or convolve with a low- pass filter A filter whose FT is a box is bad, because the filter kernel has infinite support Common solution: use a Gaussian –multiplying FT by Gaussian is equivalent to convolving image with Gaussian.

40
Sampling without smoothing. Top row shows the images, sampled at every second pixel to get the next; bottom row shows the magnitude spectrum of these images.

41
Gaussian Filter

42
Sampling with smoothing. Top row shows the images. We get the next image by smoothing the image with a Gaussian with sigma 1 pixel, then sampling at every second pixel to get the next; bottom row shows the magnitude spectrum of these images.

43
Sampling with smoothing. Top row shows the images. We get the next image by smoothing the image with a Gaussian with sigma 1.4 pixels, then sampling at every second pixel to get the next; bottom row shows the magnitude spectrum of these images.

44
Approximate Gaussian

45
What about 2D? Separability of Gaussian Requires n 2 k 2 multiplications for n by n image and k by k kernel. Requires 2kn 2 multiplications for n by n image and k by k kernel.

46
Algorithm Apply 1D mask to alternate pixels along each row of image. Apply 1D mask to alternate pixels along each colum of resultant image from previous step.

Similar presentations











>")




 all frequencies: F( ) is the spectrum of the function.>")


 and little.>")

 Inverse Transform.>")



 + C = A + (B + C) –given A, B, A + X = B for only.>")