Download presentation
Presentation is loading. Please wait.

1
From Motor Babbling to Planning Cornelius Weber Frankfurt Institute for Advanced Studies Goethe University Frankfurt, Germany ICN Young Investigators’ Colloquium 26 th June 2008, Frankfurt am Main

2
Reinforcement Learning valueactor units fixed reactive system that always strives for the same goal Trained Weights

3
reinforcement learning does not use the exploration phase to learn a general model of the environment that would allow the agent to plan a route to any goal so let’s do this

4
Learning actor state space randomly move around the state space learn world models: ● associative model ● inverse model ● forward model variables: ► action ► current state ► next state

5
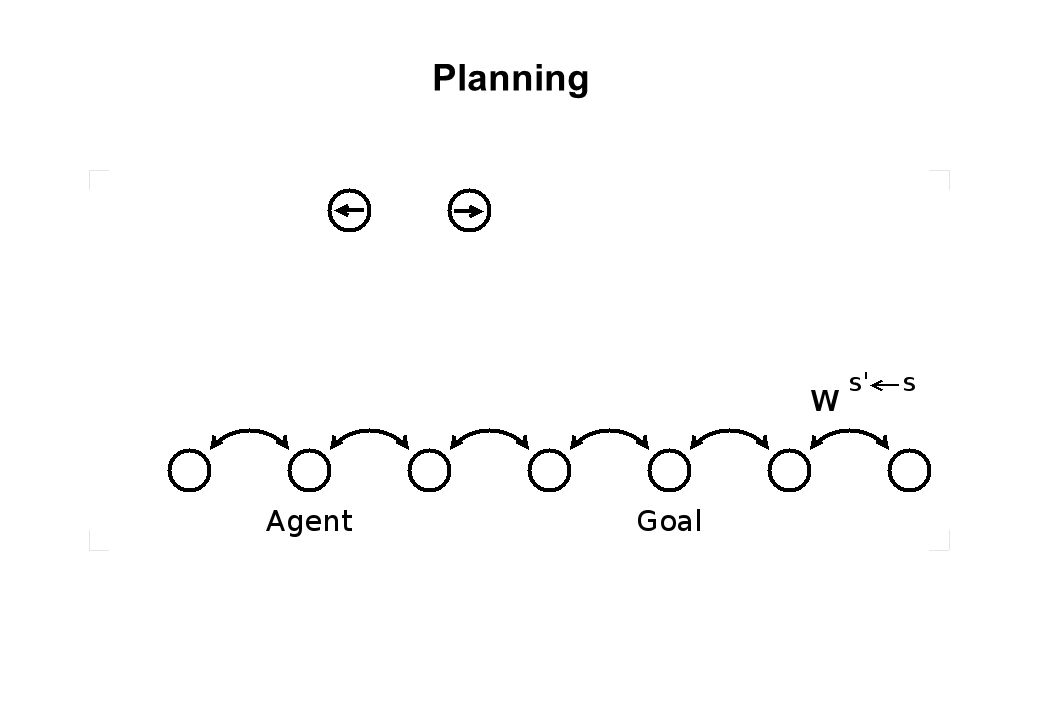
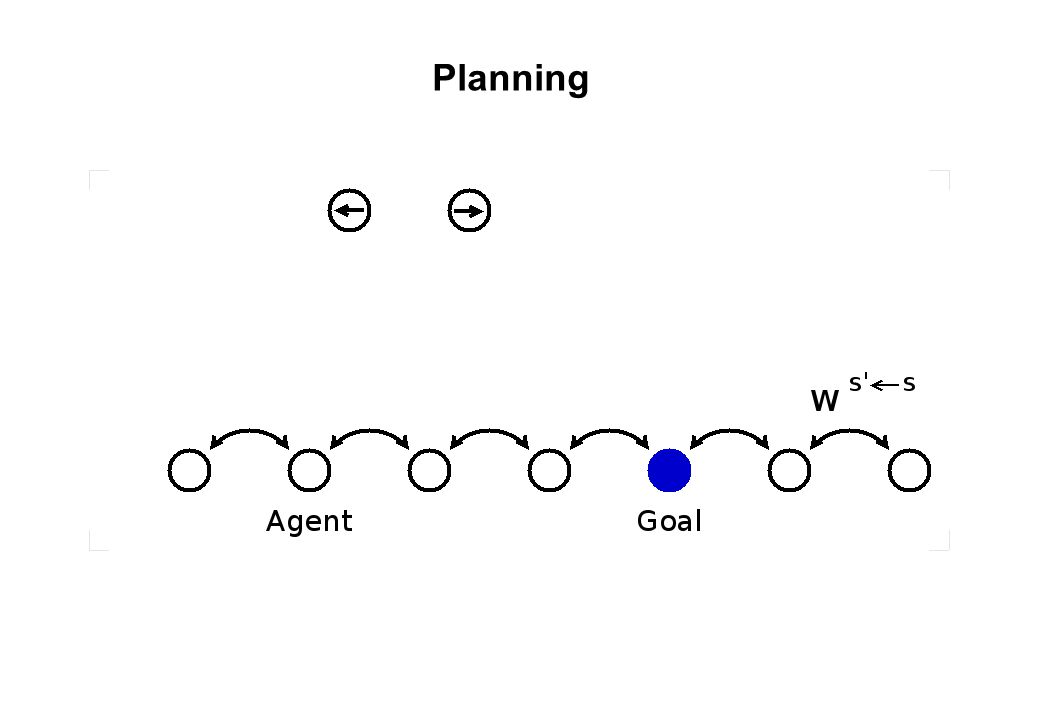
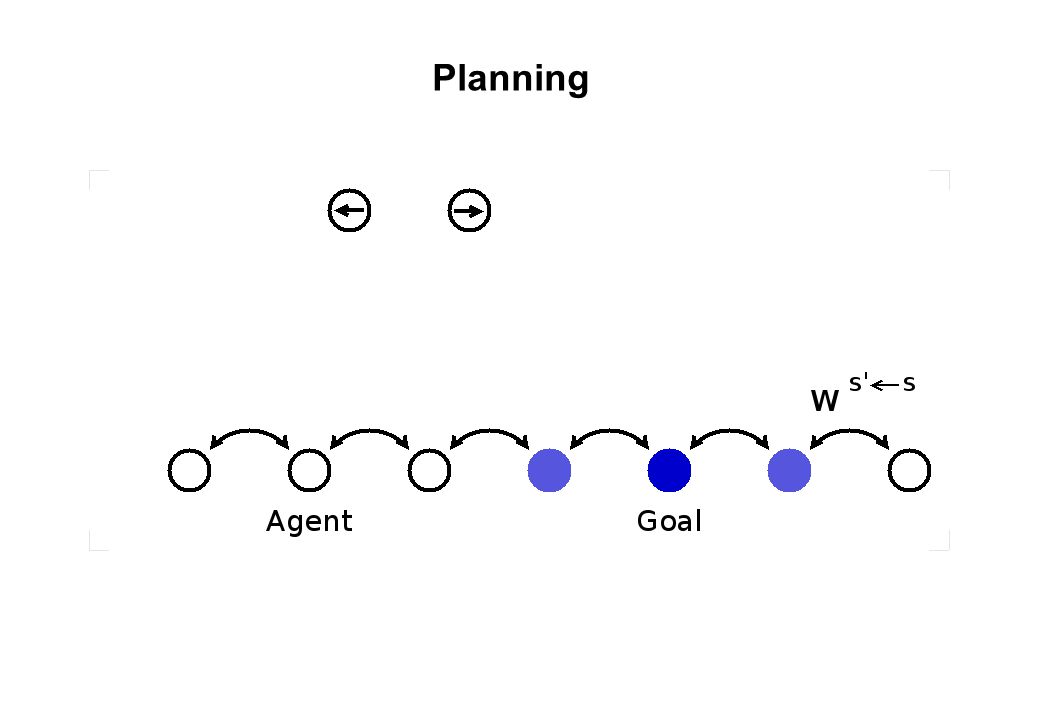
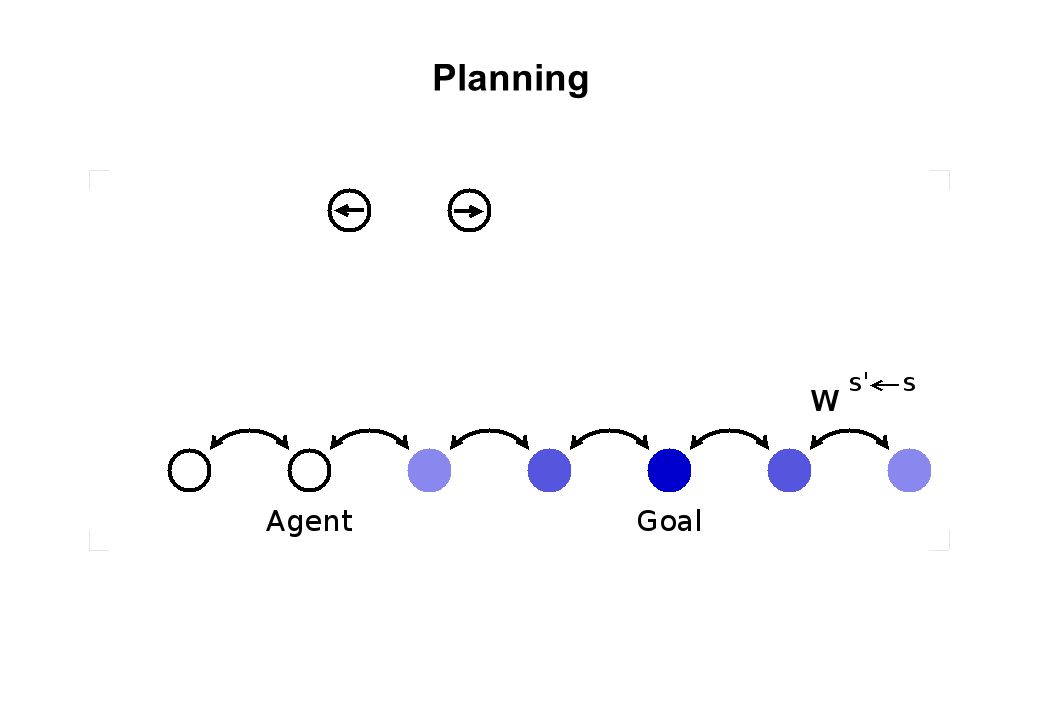
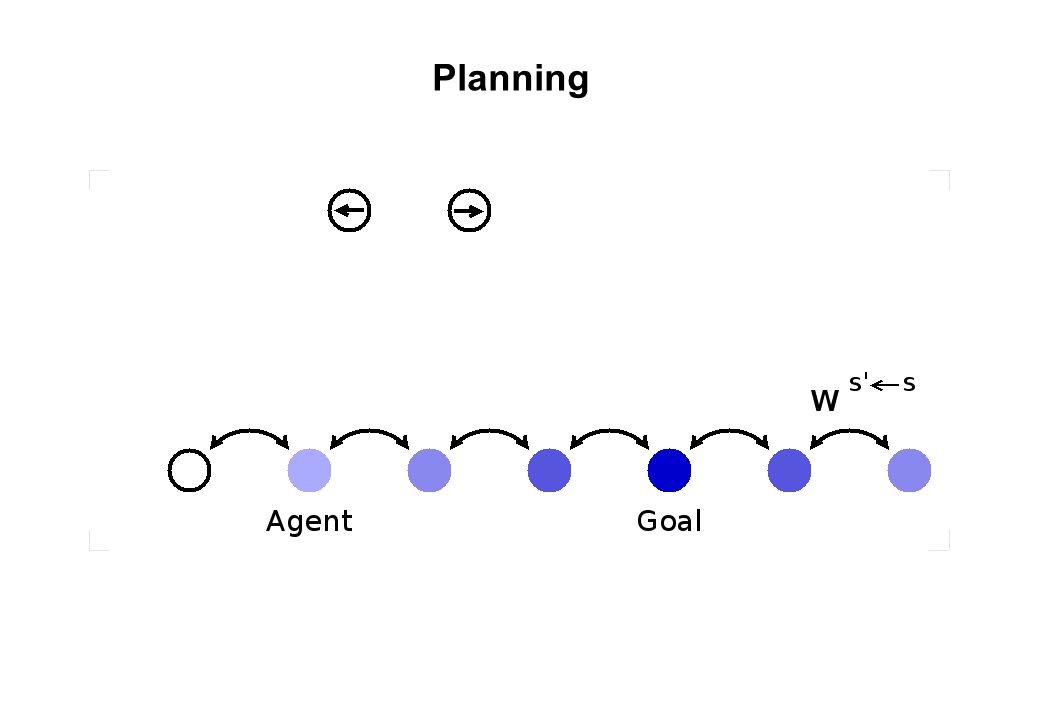
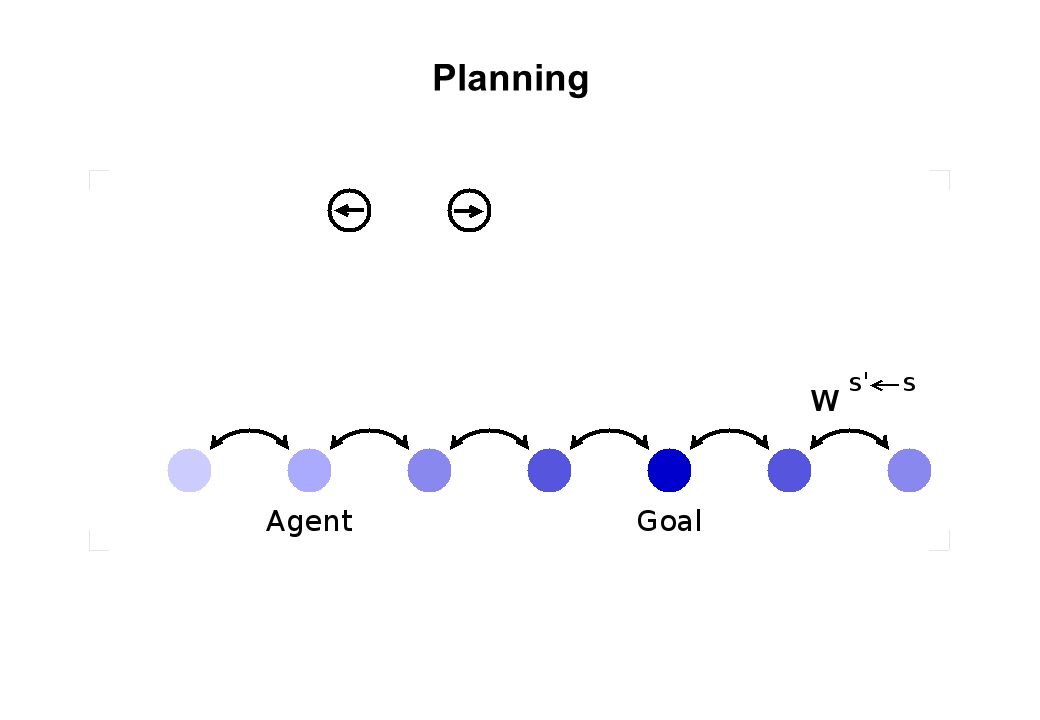
Learning: Associative Model weights to associate neighbouring states use these to find any possible routes between agent and goal

6
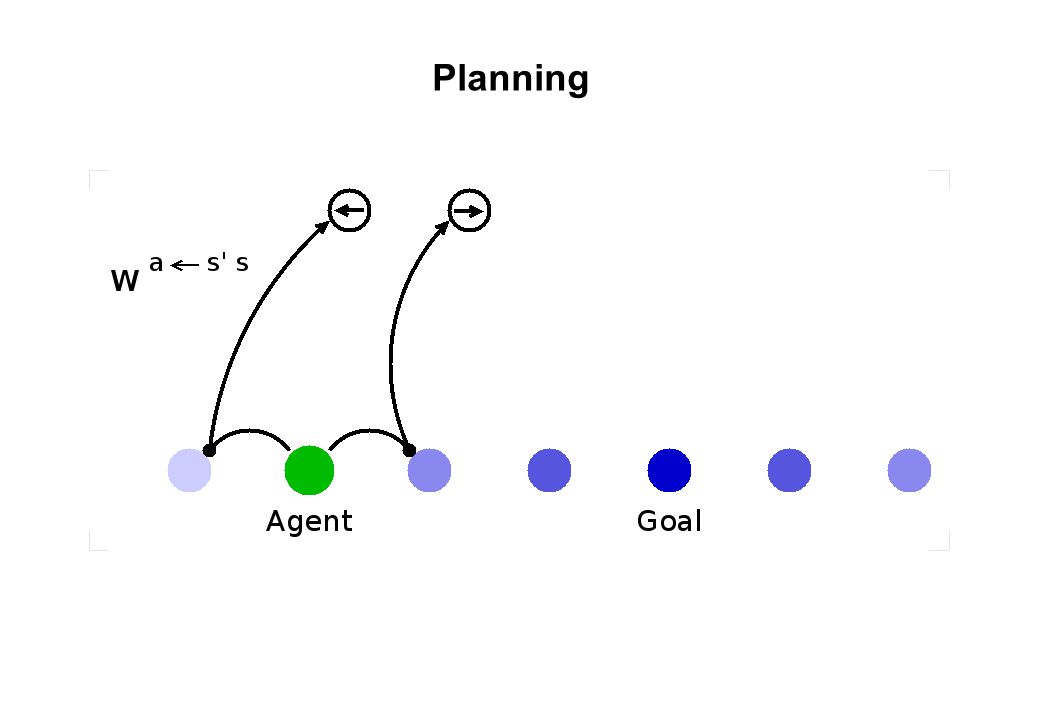
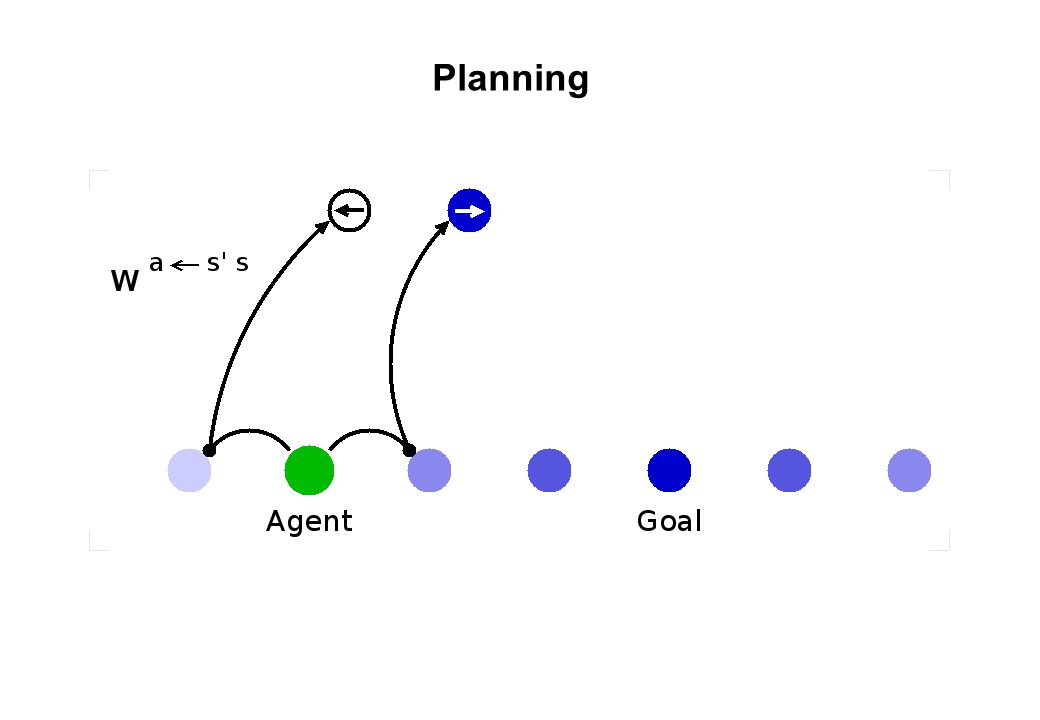
Learning: Inverse Model weights to “postdict” action given state pair use these to identify the action that leads to a desired state Sigma-Pi neuron model

7
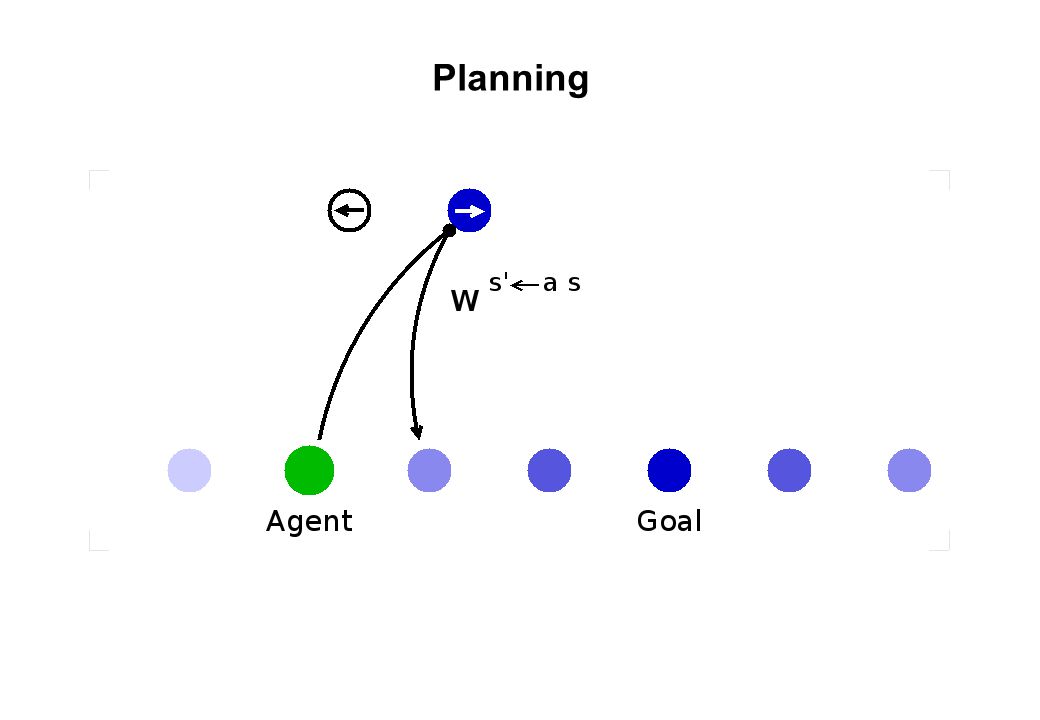
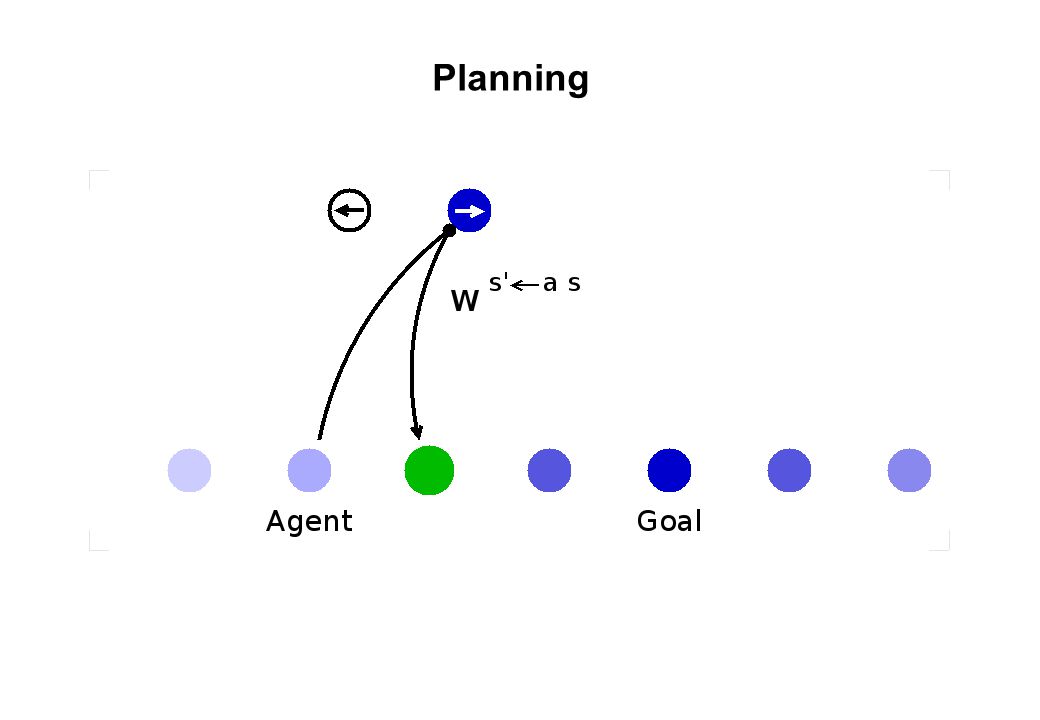
Learning: Forward Model weights to predict state given state-action pair use these to predict the next state given the chosen action

8
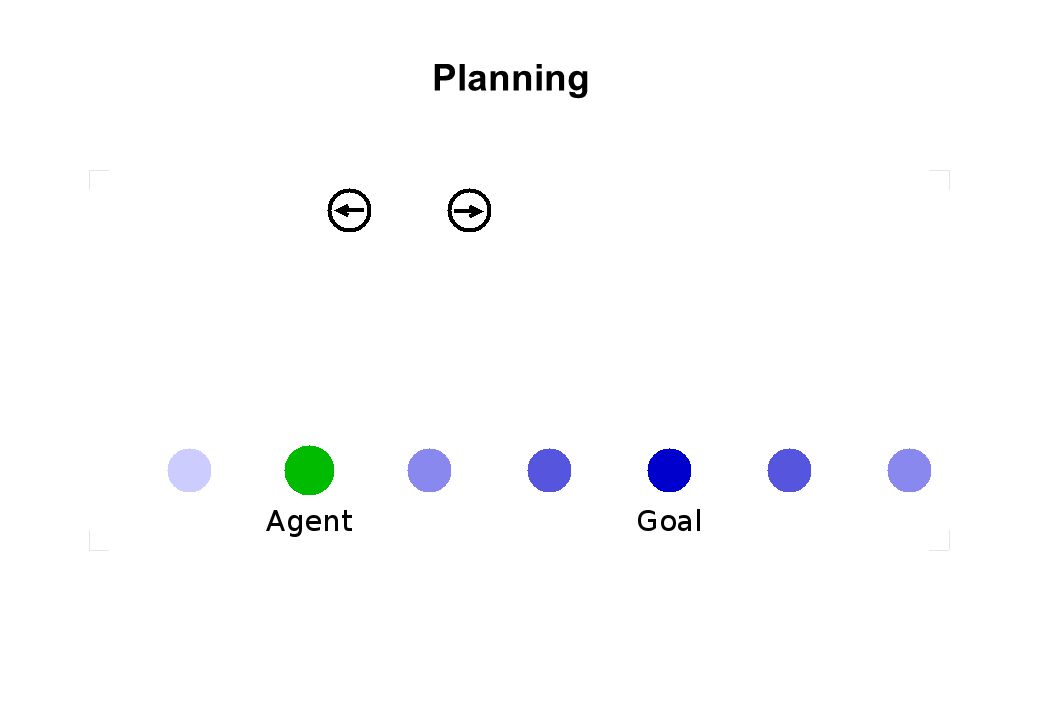
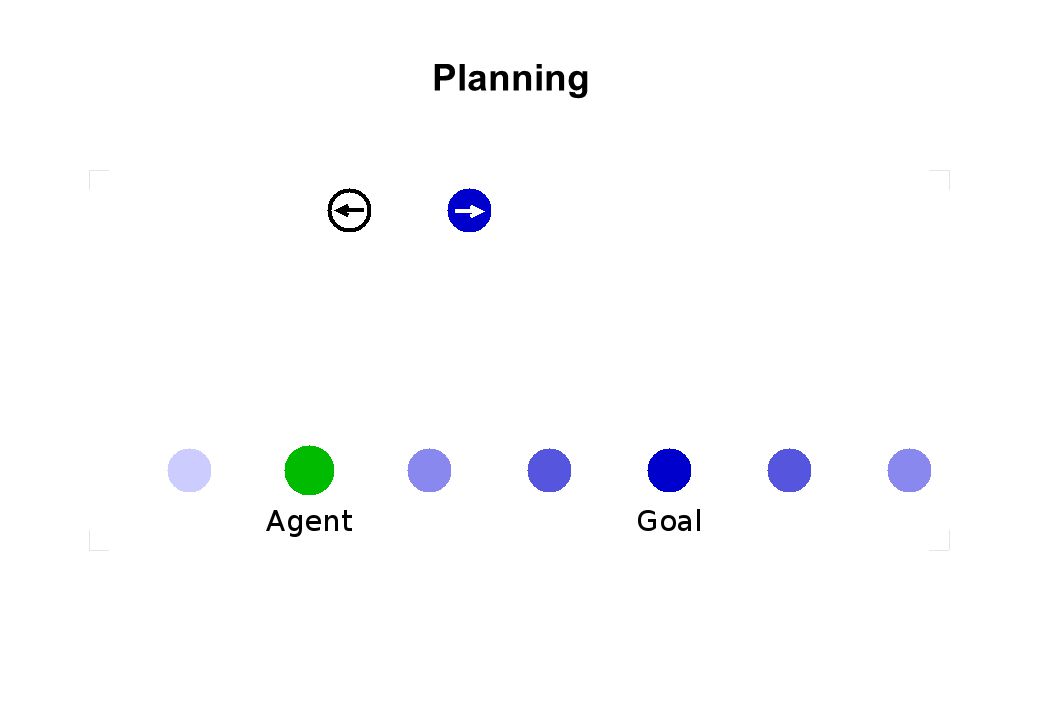
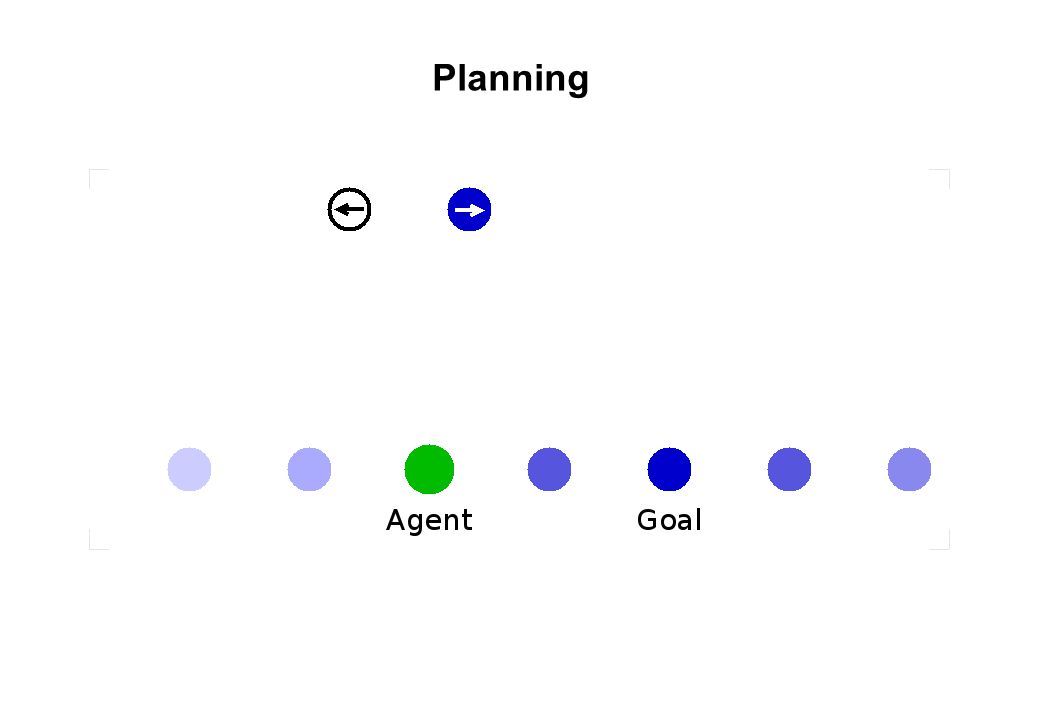
Planning

22
goal actor units agent

23
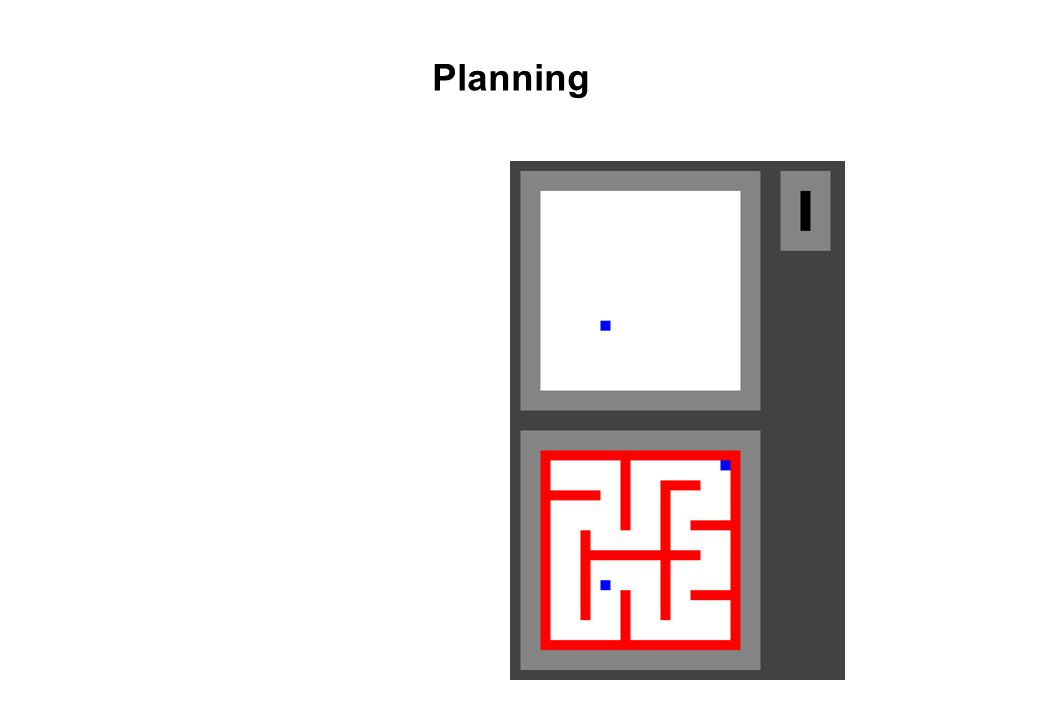
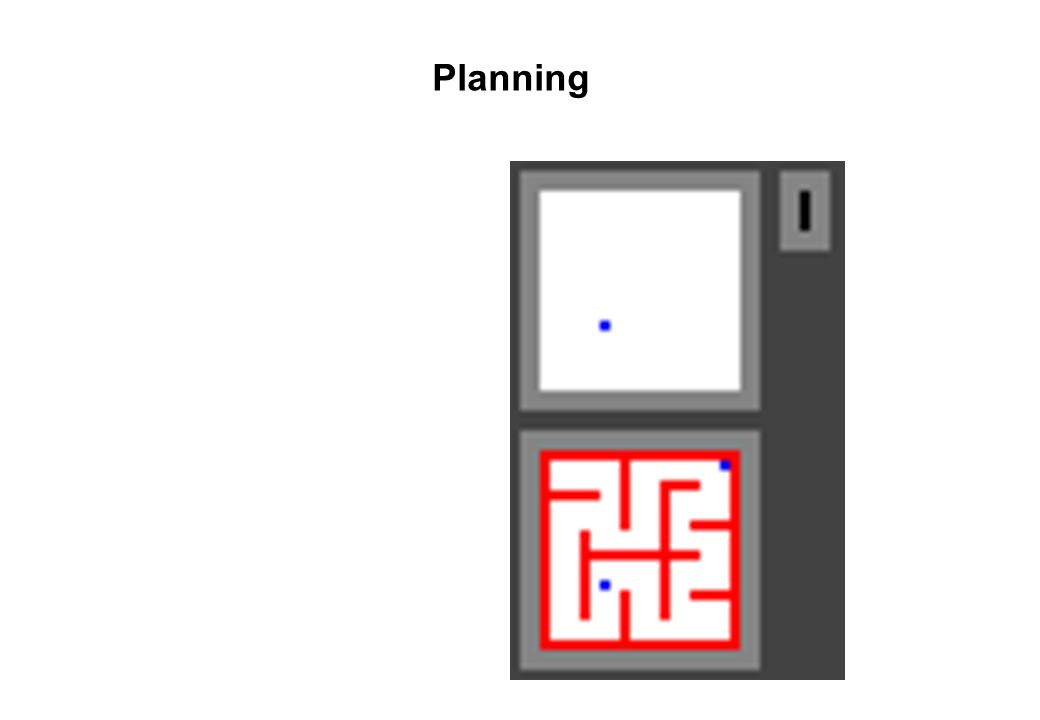
Planning

26
Discussion - AI context... assumed links explained by learning - reinforcement learning... if no access to full state space - noise... wide “goal hills” will have flat slopes - shortest path... not taken; how to define? - biological plausibility... Sigma-Pi neurons; winner-take-all - to do: embedding... learn state space from sensor input - to do: embedding... let the goal be assigned naturally - to do: embedding... hand-designed planning phases

27
Acknowledgments Collaborators: Jochen Triesch FIAS J-W-Goethe University Frankfurt Stefan Wermter University of Sunderland Mark Elshaw University of Sheffield

Similar presentations
RL Lecture, Slide 1 Reinforcement Learning (RL) Consider an “agent” embedded.>")


, where |V| = N. Each processor has unique ID between 1 and N.>")








Reduce error variance. 2)Remove sources of bias from experiment. 3)Obtain adjusted estimates of population means.>")






