Download presentation
Presentation is loading. Please wait.

1
Tracking a moving object with real-time obstacle avoidance Chung-Hao Chen, Chang Cheng, David Page, Andreas Koschan and Mongi Abidi Imaging, Robotics and Intelligent Systems Lab, Department of Electrical and Computer Engineering, The University of Tennessee, Knoxville, Tennessee, USA International Journal of Industrial Robot, Special Issue on Robot Control and Programming, Vol. 33, No. 6, pp. 460-468, 2006. Presented by : 曹憲中

2
Outline Introduction System architecture Image Input Phase Object Tracking Phase Robot Control Phase Obstacle Detection Phase Obstacle Avoidance Phase Experimental Results Conclusion

3
Introduction The contributions of this paper are to present a mobile robotic system which can simultaneously track a moving object and avoid obstacles in real-time.

4
Outline Introduction System architecture Image Input Phase Object Tracking Phase Robot Control Phase Obstacle Detection Phase Obstacle Avoidance Phase Experimental Results Conclusion

5
System architecture

7
Outline Introduction System architecture Image Input Phase Object Tracking Phase Robot Control Phase Obstacle Detection Phase Obstacle Avoidance Phase Experimental Results Conclusion

8
Image Input Phase The Logitech Web Camera has a fixed view and is attached to the robotic platform. It is used to acquire color 320x240 images.

9
Outline Introduction System architecture Image Input Phase Object Tracking Phase Robot Control Phase Obstacle Detection Phase Obstacle Avoidance Phase Experimental Results Conclusion

10
Object Tracking Phase Lucas and Kanade's algorithm M represents the mass motion vector of the tracked object (in 1x2 matrix form). X i represents each motion vector of the tracked object (in 1x2 matrixform). N represents amount of total motion vector.
. N represents amount of total motion vector..")
11
Object Tracking Phase Conversion from image to 2D world coordinate system.

12
Outline Introduction System architecture Image Input Phase Object Tracking Phase Robot Control Phase Obstacle Detection Phase Obstacle Avoidance Phase Experimental Results Conclusion

13
Robot Control Phase Conversion from image to 2D world coordinate system.

14
Outline Introduction System architecture Image Input Phase Object Tracking Phase Robot Control Phase Obstacle Detection Phase Obstacle Avoidance Phase Experimental Results Conclusion

15
Obstacle Detection Phase It uses a range scanner to sense if there is any obstacle in its projected path. If no obstacle is detected, the robot mobility phase is activated. Subsequently, the control of the system returns back to the image input phase. Otherwise, the system uses the obstacle avoidance phase for generating another robot control command in order to avoid the obstacle.

16
Outline Introduction System architecture Image Input Phase Object Tracking Phase Robot Control Phase Obstacle Detection Phase Obstacle Avoidance Phase Experimental Results Conclusion

17
Obstacle Avoidance Phase They propose a new algorithm called dynamic goal potential fields (DGPF) which is based on the traditional Potential Fields methods to solve this type of problems.
 which is based on the traditional Potential Fields methods to solve this type of problems.")
18
The DGPF algorithm is based on the following: 1. Using the current configuration, goal configuration and sensor data, it runs a basic potential fields algorithm to predict a path; 2. If the goal configuration does not change too much, then the robot follows this path to avoid any obstacle; 3. If the goal configuration moves to a new position which has a big change from the old position, the algorithm randomly chooses some points in the predicted path and runs the basic Potential Fields method to compute several paths starting from these points based on current sensor data; 4. The path with the lowest cost is selected (based on Euclidian distance). The robot is now using the new path to move to the new goal configuration.
. The robot is now using the new path to move to the new goal configuration..")
19
Obstacle Avoidance Phase

20
The speed of the object is 2 m/s, and the robot step size is 12 cm.

21
Obstacle Avoidance Phase The speed of the object is 2 m/s, and the robot step size is 50 cm.

22
Obstacle Avoidance Phase A better solution is to use a dynamic step size. When the object is moving slowly, a large step size is chosen to let the robot avoid the obstacle quickly. Conversely, a relatively small step size is set to allow the robot to choose a better adjusted path to move towards a new position when the object is moving quickly.

23
Outline Introduction System architecture Image Input Phase Object Tracking Phase Robot Control Phase Obstacle Detection Phase Obstacle Avoidance Phase Experimental Results Conclusion

24
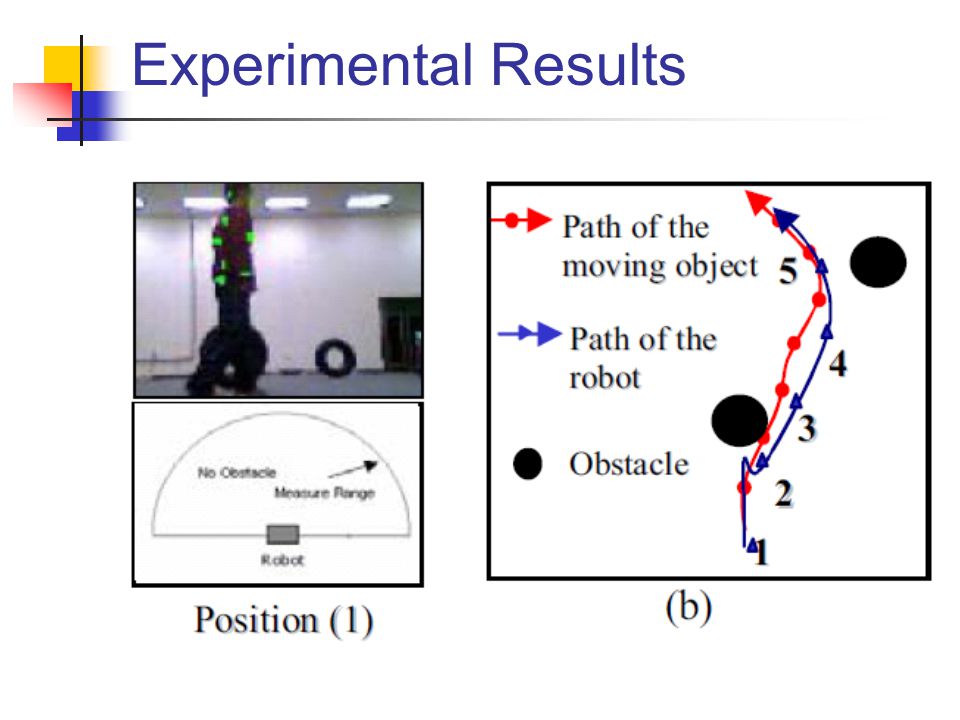
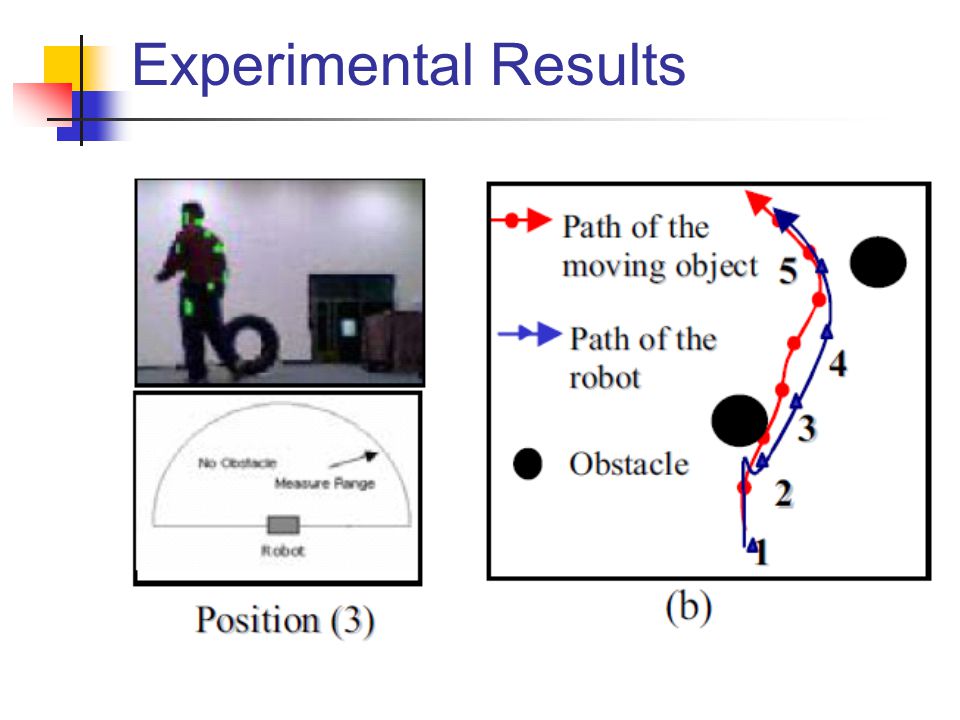
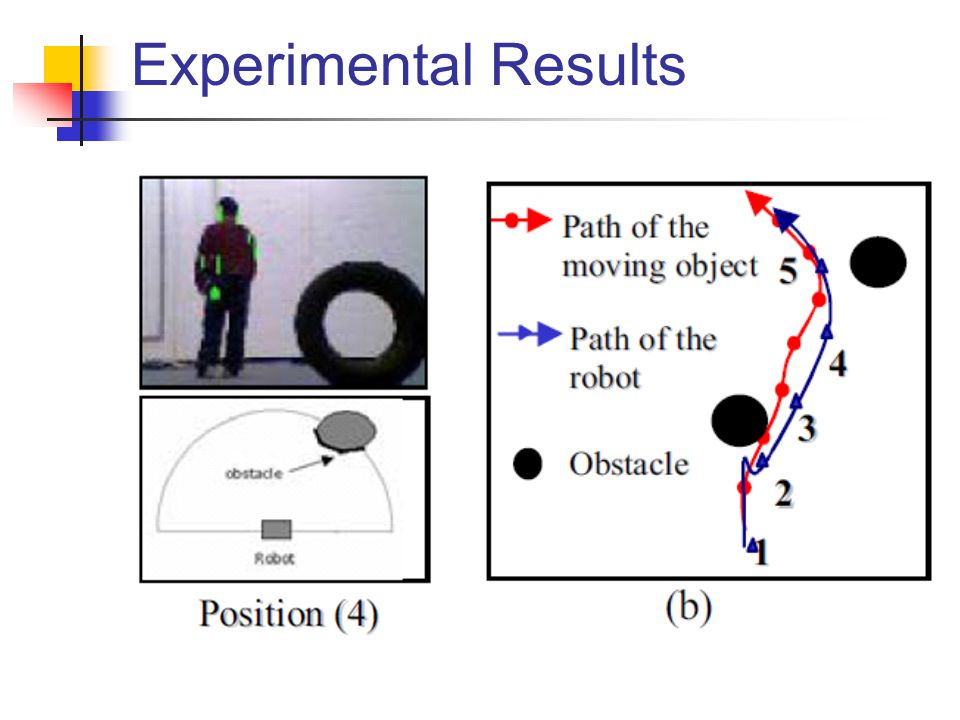
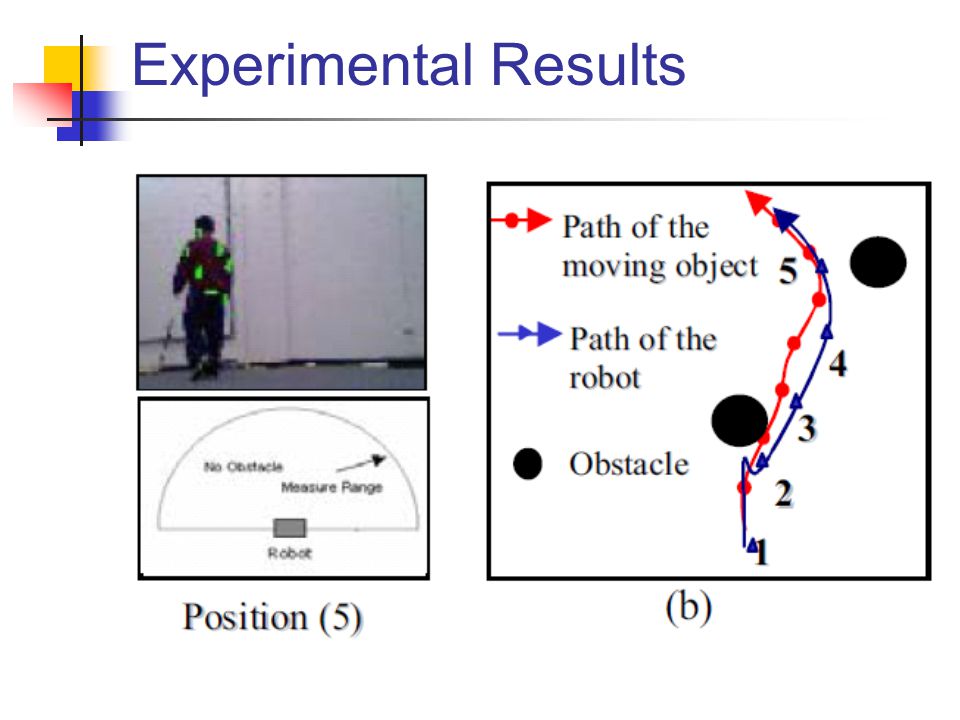
Experimental Results

31
Outline Introduction System architecture Image Input Phase Object Tracking Phase Robot Control Phase Obstacle Detection Phase Obstacle Avoidance Phase Experimental Results Conclusion

32
The system uses two sensors: a visual camera to sense the movement of any tracked object, and a range sensor to help the robot detect and then avoid obstacles in real-time while continuing to track the object. This paper also presents a modified Potential Fields method called DGPF method which is used to deal with real-time obstacle avoidance for object tracking.

33
Thank you for your attention.

Similar presentations





















 PPT : 100% 製作 International Journal.>")
>")