Download presentation
Presentation is loading. Please wait.

1
Interprocedural Analysis Noam Rinetzky Mooly Sagiv

2
Bibliography Textbook 2.5 Patrick Cousot & Radhia Cousot. Static determination of dynamic properties of recursive procedures In IFIP Conference on Formal Description of Programming Concepts, E.J. Neuhold, (Ed.), pages 237- 277, St-Andrews, N.B., Canada, 1977. North-Holland Publishing Company (1978). Two Approaches to interprocedural analysis by Micha Sharir and Amir Pnueli IDFS Interprocedural Distributive Finite Subset Precise interprocedural dataflow analysis via graph reachability. Reps, Horowitz, and Sagiv, POPL’95 IDE Interprocedural Distributive Environment Precise interprocedural dataflow analysis with applications to constant propagation. Sagiv, Reps, Horowitz, and TCS’96
, pages , St-Andrews, N.B., Canada, North-Holland Publishing Company (1978). Two Approaches to interprocedural analysis by Micha Sharir and Amir Pnueli IDFS Interprocedural Distributive Finite Subset Precise interprocedural dataflow analysis via graph reachability. Reps, Horowitz, and Sagiv, POPL’95 IDE Interprocedural Distributive Environment Precise interprocedural dataflow analysis with applications to constant propagation. Sagiv, Reps, Horowitz, and TCS’96.")
3
Challenges in Interprocedural Analysis Respect call-return mechanism Handling recursion Local variables Parameter passing mechanisms The called procedure is not always known The source code of the called procedure is not always available Concurrency

4
Stack regime P() { … R(); … } R(){ … } Q() { … R(); … } call return call return P R
 { … R(); … } R(){ … } Q() { … R(); … } call return call return P R")
5
Guiding light Exploit stack regime Precision Efficiency

6
Simplifying Assumptions Parameter passed by value No OO No nesting No concurrency Recursion is supported

7
Topics Covered The trivial approach Procedure Inlining The naive approach The call string approach Functional Approach Valid paths Interprocedural Analysis via Graph Reachability Beyond reachability [Demand analysis] [Advanced Topics] –Karr’s analysis –Backward –MOPED
![Topics Covered The trivial approach Procedure Inlining The naive approach The call string approach Functional Approach Valid paths Interprocedural Analysis via Graph Reachability Beyond reachability [Demand analysis] [Advanced Topics] –Karr’s analysis –Backward –MOPED](http://images.slideplayer.com/16/4969737/slides/slide_7.jpg "Topics Covered The trivial approach Procedure Inlining The naive approach The call string approach Functional Approach Valid paths Interprocedural Analysis via Graph Reachability Beyond reachability [Demand analysis] [Advanced Topics] –Karr’s analysis –Backward –MOPED")
8
Undecidability Issues It is undecidable if a program point is reachable in some execution Some static analysis problems are undecidable even if the program conditions are ignored

9
The Constant Propagation Example while (...) { if (...) x_1 = x_1 + 1; if (...) x_2 = x_2 + 1;... if (...) x_n = x_n + 1; } y = truncate (1/ (1 + p 2 (x_1, x_2,..., x_n)) /* Is y=0 here? */
 x_n = x_n + 1; } y = truncate (1/ (1 + p 2 (x_1, x_2,..., x_n)) /* Is y=0 here. */.")
10
Conservative Solution Every detected constant is indeed constant –But may fail to identify some constants Every potential impact is identified –Superfluous impacts

11
The extra cost of procedures Call return complicates the analysis Unbounded stack memory Increases asymptotic complexity But can be tolerable in practice Sometimes even cheaper/more precise than intraprocedural analysis

12
A trivial treatment of procedure Analyze a single procedure After every call continue with conservative information –Global variables and local variables which “may be modified by the call” have unknown values Can be easily implemented Procedures can be written in different languages Procedure inline can help

13
Disadvantages of the trivial solution Modular (object oriented and functional) programming encourages small frequently called procedures Almost all information is lost
 programming encourages small frequently called procedures Almost all information is lost")
14
Procedure Inlining Inline called procedures Simple Does not handle recursion Exponential blow up p1 { call p2 … call p2 } p2 { call p3 … call p3 } p3{ }

15
A Naive Interprocedural solution Treat procedure calls as gotos Abstract call/return correlations Obtain a conservative solution Use chaotic iterations Usually fast

16
Simple Example int p(int a) { return a + 1; } void main() { int x ; x = p(7); x = p(9) ; }
 { return a + 1; } void main() { int x ; x = p(7); x = p(9) ; }")
17
Simple Example int p(int a) { [a 7] return a + 1; } void main() { int x ; x = p(7); x = p(9) ; }
![Simple Example int p(int a) { [a 7] return a + 1; } void main() { int x ; x = p(7); x = p(9) ; }](http://images.slideplayer.com/16/4969737/slides/slide_17.jpg "Simple Example int p(int a) { [a 7] return a + 1; } void main() { int x ; x = p(7); x = p(9) ; }")
18
Simple Example int p(int a) { [a 7] return a + 1; [a 7, $$ 8] } void main() { int x ; x = p(7); x = p(9) ; }
![Simple Example int p(int a) { [a 7] return a + 1; [a 7, $$ 8] } void main() { int x ; x = p(7); x = p(9) ; }](http://images.slideplayer.com/16/4969737/slides/slide_18.jpg "Simple Example int p(int a) { [a 7] return a + 1; [a 7, $$ 8] } void main() { int x ; x = p(7); x = p(9) ; }")
19
Simple Example int p(int a) { [a 7] return a + 1; [a 7, $$ 8] } void main() { int x ; x = p(7); [x 8] x = p(9) ; [x 8] }
![Simple Example int p(int a) { [a 7] return a + 1; [a 7, $$ 8] } void main() { int x ; x = p(7); [x 8] x = p(9) ; [x 8] }](http://images.slideplayer.com/16/4969737/slides/slide_19.jpg "Simple Example int p(int a) { [a 7] return a + 1; [a 7, $$ 8] } void main() { int x ; x = p(7); [x 8] x = p(9) ; [x 8] }")
20
Simple Example int p(int a) { [a 7] return a + 1; [a 7, $$ 8] } void main() { int x ; x =l p(7); [x 8] x = p(9) ; [x 8] }
![Simple Example int p(int a) { [a 7] return a + 1; [a 7, $$ 8] } void main() { int x ; x =l p(7); [x 8] x = p(9) ; [x 8] }](http://images.slideplayer.com/16/4969737/slides/slide_20.jpg "Simple Example int p(int a) { [a 7] return a + 1; [a 7, $$ 8] } void main() { int x ; x =l p(7); [x 8] x = p(9) ; [x 8] }")
21
Simple Example int p(int a) { [a ] return a + 1; [a 7, $$ 8] } void main() { int x ; x = p(7); [x 8] x = p(9) ; [x 8] }
![Simple Example int p(int a) { [a ] return a + 1; [a 7, $$ 8] } void main() { int x ; x = p(7); [x 8] x = p(9) ; [x 8] }](http://images.slideplayer.com/16/4969737/slides/slide_21.jpg "Simple Example int p(int a) { [a ] return a + 1; [a 7, $$ 8] } void main() { int x ; x = p(7); [x 8] x = p(9) ; [x 8] }")
22
Simple Example int p(int a) { [a ] return a + 1; [a , $$ ] } void main() { int x ; x = p(7); [x 8] x = p(9); [x 8] }
![Simple Example int p(int a) { [a ] return a + 1; [a , $$ ] } void main() { int x ; x = p(7); [x 8] x = p(9); [x 8] }](http://images.slideplayer.com/16/4969737/slides/slide_22.jpg "Simple Example int p(int a) { [a ] return a + 1; [a , $$ ] } void main() { int x ; x = p(7); [x 8] x = p(9); [x 8] }")
23
Simple Example int p(int a) { [a ] return a + 1; [a , $$ ] } void main() { int x ; x = p(7) ; [x ] x = p(9) ; [x ] }
![Simple Example int p(int a) { [a ] return a + 1; [a , $$ ] } void main() { int x ; x = p(7) ; [x ] x = p(9) ; [x ] }](http://images.slideplayer.com/16/4969737/slides/slide_23.jpg "Simple Example int p(int a) { [a ] return a + 1; [a , $$ ] } void main() { int x ; x = p(7) ; [x ] x = p(9) ; [x ] }")
24
The Call String Approach The data flow value is associated with sequences of calls (call string) Use Chaotic iterations To guarantee termination limit the size of call string (typically 1 or 2) –Represents tails of calls Abstract inline
 Use Chaotic iterations To guarantee termination limit the size of call string (typically 1 or 2) –Represents tails of calls Abstract inline")
25
Simple Example int p(int a) { return a + 1; } void main() { int x ; c1: x = p(7); c2: x = p(9) ; }
 { return a + 1; } void main() { int x ; c1: x = p(7); c2: x = p(9) ; }")
26
Simple Example int p(int a) { c1: [a 7] return a + 1; } void main() { int x ; c1: x = p(7); c2: x = p(9) ; }
![Simple Example int p(int a) { c1: [a 7] return a + 1; } void main() { int x ; c1: x = p(7); c2: x = p(9) ; }](http://images.slideplayer.com/16/4969737/slides/slide_26.jpg "Simple Example int p(int a) { c1: [a 7] return a + 1; } void main() { int x ; c1: x = p(7); c2: x = p(9) ; }")
27
Simple Example int p(int a) { c1: [a 7] return a + 1; c1:[a 7, $$ 8] } void main() { int x ; c1: x = p(7); c2: x = p(9) ; }
![Simple Example int p(int a) { c1: [a 7] return a + 1; c1:[a 7, $$ 8] } void main() { int x ; c1: x = p(7); c2: x = p(9) ; }](http://images.slideplayer.com/16/4969737/slides/slide_27.jpg "Simple Example int p(int a) { c1: [a 7] return a + 1; c1:[a 7, $$ 8] } void main() { int x ; c1: x = p(7); c2: x = p(9) ; }")
28
Simple Example int p(int a) { c1: [a 7] return a + 1; c1:[a 7, $$ 8] } void main() { int x ; c1: x = p(7); : x 8 c2: x = p(9) ; }
![Simple Example int p(int a) { c1: [a 7] return a + 1; c1:[a 7, $$ 8] } void main() { int x ; c1: x = p(7); : x 8 c2: x = p(9) ; }](http://images.slideplayer.com/16/4969737/slides/slide_28.jpg "Simple Example int p(int a) { c1: [a 7] return a + 1; c1:[a 7, $$ 8] } void main() { int x ; c1: x = p(7); : x 8 c2: x = p(9) ; }")
29
Simple Example int p(int a) { c1:[a 7] return a + 1; c1:[a 7, $$ 8] } void main() { int x ; c1: x = p(7); : [x 8] c2: x = p(9) ; }
![Simple Example int p(int a) { c1:[a 7] return a + 1; c1:[a 7, $$ 8] } void main() { int x ; c1: x = p(7); : [x 8] c2: x = p(9) ; }](http://images.slideplayer.com/16/4969737/slides/slide_29.jpg "Simple Example int p(int a) { c1:[a 7] return a + 1; c1:[a 7, $$ 8] } void main() { int x ; c1: x = p(7); : [x 8] c2: x = p(9) ; }")
30
Simple Example int p(int a) { c1:[a 7] c2:[a 9] return a + 1; c1:[a 7, $$ 8] } void main() { int x ; c1: x = p(7); : [x 8] c2: x = p(9) ; }
![Simple Example int p(int a) { c1:[a 7] c2:[a 9] return a + 1; c1:[a 7, $$ 8] } void main() { int x ; c1: x = p(7); : [x 8] c2: x = p(9) ; }](http://images.slideplayer.com/16/4969737/slides/slide_30.jpg "Simple Example int p(int a) { c1:[a 7] c2:[a 9] return a + 1; c1:[a 7, $$ 8] } void main() { int x ; c1: x = p(7); : [x 8] c2: x = p(9) ; }")
31
Simple Example int p(int a) { c1:[a 7] c2:[a 9] return a + 1; c1:[a 7, $$ 8] c2:[a 9, $$ 10] } void main() { int x ; c1: x = p(7); : [x 8] c2: x = p(9) ; }
![Simple Example int p(int a) { c1:[a 7] c2:[a 9] return a + 1; c1:[a 7, $$ 8] c2:[a 9, $$ 10] } void main() { int x ; c1: x = p(7); : [x 8] c2: x = p(9) ; }](http://images.slideplayer.com/16/4969737/slides/slide_31.jpg "Simple Example int p(int a) { c1:[a 7] c2:[a 9] return a + 1; c1:[a 7, $$ 8] c2:[a 9, $$ 10] } void main() { int x ; c1: x = p(7); : [x 8] c2: x = p(9) ; }")
32
Simple Example int p(int a) { c1:[a 7] c2:[a 9] return a + 1; c1:[a 7, $$ 8] c2:[a 9, $$ 10] } void main() { int x ; c1: x = p(7); : [x 8] c2: x = p(9) ; : [x 10] }
![Simple Example int p(int a) { c1:[a 7] c2:[a 9] return a + 1; c1:[a 7, $$ 8] c2:[a 9, $$ 10] } void main() { int x ; c1: x = p(7); : [x 8] c2: x = p(9) ; : [x 10] }](http://images.slideplayer.com/16/4969737/slides/slide_32.jpg "Simple Example int p(int a) { c1:[a 7] c2:[a 9] return a + 1; c1:[a 7, $$ 8] c2:[a 9, $$ 10] } void main() { int x ; c1: x = p(7); : [x 8] c2: x = p(9) ; : [x 10] }")
33
Another Example int p(int a) { c1:[a 7] c2:[a 9] return c3: p1(a + 1); c1:[a 7, $$ ] c2:[a 9, $$ ] } void main() { int x ; c1: x = p(7); : [x 8] c2: x = p(9) ; : [x 10] } int p1(int b) { (c1|c2)c3:[b ] return 2 * b; (c1|c2)c3:[b , $$ ] }
![Another Example int p(int a) { c1:[a 7] c2:[a 9] return c3: p1(a + 1); c1:[a 7, $$ ] c2:[a 9, $$ ] } void main() { int x ; c1: x = p(7); : [x 8] c2: x = p(9) ; : [x 10] } int p1(int b) { (c1|c2)c3:[b ] return 2 * b; (c1|c2)c3:[b , $$ ] }](http://images.slideplayer.com/16/4969737/slides/slide_33.jpg "Another Example int p(int a) { c1:[a 7] c2:[a 9] return c3: p1(a + 1); c1:[a 7, $$ ] c2:[a 9, $$ ] } void main() { int x ; c1: x = p(7); : [x 8] c2: x = p(9) ; : [x 10] } int p1(int b) { (c1|c2)c3:[b ] return 2 * b; (c1|c2)c3:[b , $$ ] }")
34
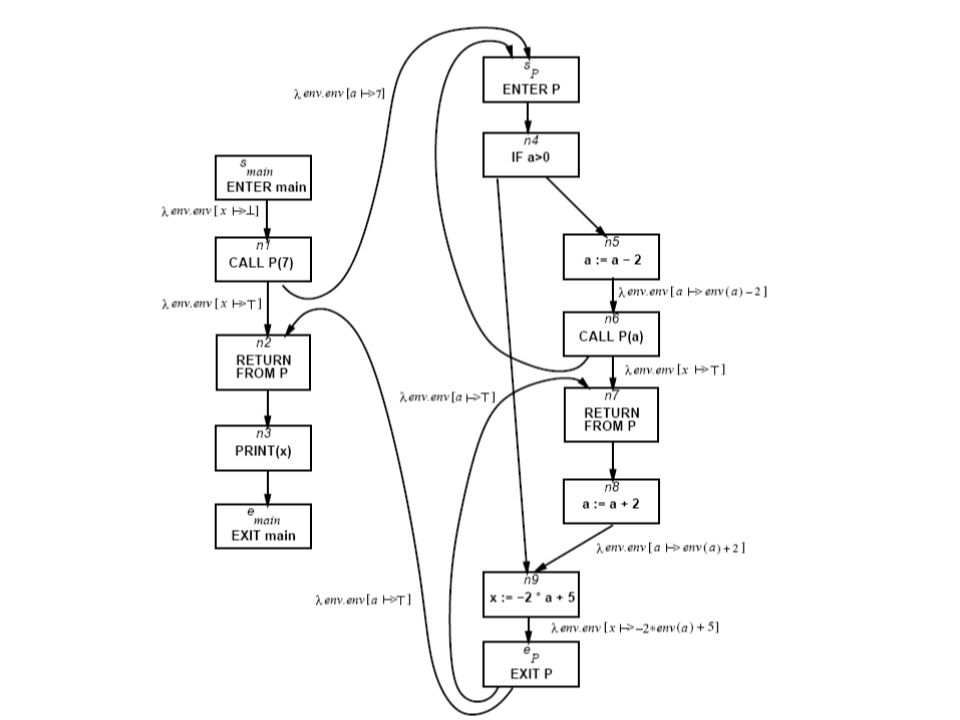
Recursion int p(int a) { c1: [a 7] if (…) { c1: [a 7] a = a -1 ; c1: [a 6] c2: p (a); a = a + 1;{ x = -2*a + 5; } void main() { c1: x = p(7); }
![Recursion int p(int a) { c1: [a 7] if (…) { c1: [a 7] a = a -1 ; c1: [a 6] c2: p (a); a = a + 1;{ x = -2*a + 5; } void main() { c1: x = p(7); }](http://images.slideplayer.com/16/4969737/slides/slide_34.jpg "Recursion int p(int a) { c1: [a 7] if (…) { c1: [a 7] a = a -1 ; c1: [a 6] c2: p (a); a = a + 1;{ x = -2*a + 5; } void main() { c1: x = p(7); }")
35
Recursion int p(int a) { c1: [a 7] c1.c2: [a 6] if (…) { c1: [a 7] a = a -1 ; c1: [a 6] c2: p (a); a = a + 1;} x = -2*a + 5; } void main() { c1: x = p(7); }
![Recursion int p(int a) { c1: [a 7] c1.c2: [a 6] if (…) { c1: [a 7] a = a -1 ; c1: [a 6] c2: p (a); a = a + 1;} x = -2*a + 5; } void main() { c1: x = p(7); }](http://images.slideplayer.com/16/4969737/slides/slide_35.jpg "Recursion int p(int a) { c1: [a 7] c1.c2: [a 6] if (…) { c1: [a 7] a = a -1 ; c1: [a 6] c2: p (a); a = a + 1;} x = -2*a + 5; } void main() { c1: x = p(7); }")
36
Recursion int p(int a) { c1: [a 7] c1.c2: [a 6] if (…) { c1: [a 7] c1.c2: [a 6] a = a -1 ; c1: [a 6] c2: p (a); a = a + 1;} x = -2*a + 5; } void main() { c1: x = p(7); }
![Recursion int p(int a) { c1: [a 7] c1.c2: [a 6] if (…) { c1: [a 7] c1.c2: [a 6] a = a -1 ; c1: [a 6] c2: p (a); a = a + 1;} x = -2*a + 5; } void main() { c1: x = p(7); }](http://images.slideplayer.com/16/4969737/slides/slide_36.jpg "Recursion int p(int a) { c1: [a 7] c1.c2: [a 6] if (…) { c1: [a 7] c1.c2: [a 6] a = a -1 ; c1: [a 6] c2: p (a); a = a + 1;} x = -2*a + 5; } void main() { c1: x = p(7); }")
37
Recursion int p(int a) { c1: [a 7] c1.c2: [a 6] if (…) { c1: [a 7] c1.c2: [a 6] a = a -1 ; c1: [a 6] c1.c2: [a 5] c2: p (a); a = a + 1;} x = -2*a + 5; } void main() { c1: x = p(7); }
![Recursion int p(int a) { c1: [a 7] c1.c2: [a 6] if (…) { c1: [a 7] c1.c2: [a 6] a = a -1 ; c1: [a 6] c1.c2: [a 5] c2: p (a); a = a + 1;} x = -2*a + 5; } void main() { c1: x = p(7); }](http://images.slideplayer.com/16/4969737/slides/slide_37.jpg "Recursion int p(int a) { c1: [a 7] c1.c2: [a 6] if (…) { c1: [a 7] c1.c2: [a 6] a = a -1 ; c1: [a 6] c1.c2: [a 5] c2: p (a); a = a + 1;} x = -2*a + 5; } void main() { c1: x = p(7); }")
38
Recursion int p(int a) { c1: [a 7] c1.c2+: [a ] if (…) { c1: [a 7] c1.c2: [a 6] a = a -1 ; c1: [a 6] c1.c2: [a 5] c2: p (a); a = a + 1;} x = -2*a + 5; } void main() { c1: x = p(7); }
![Recursion int p(int a) { c1: [a 7] c1.c2+: [a ] if (…) { c1: [a 7] c1.c2: [a 6] a = a -1 ; c1: [a 6] c1.c2: [a 5] c2: p (a); a = a + 1;} x = -2*a + 5; } void main() { c1: x = p(7); }](http://images.slideplayer.com/16/4969737/slides/slide_38.jpg "Recursion int p(int a) { c1: [a 7] c1.c2+: [a ] if (…) { c1: [a 7] c1.c2: [a 6] a = a -1 ; c1: [a 6] c1.c2: [a 5] c2: p (a); a = a + 1;} x = -2*a + 5; } void main() { c1: x = p(7); }")
39
Recursion int p(int a) { c1: [a 7] c1.c2: [a ] if (…) { c1: [a 7] c1.c2+: [a ] a = a -1 ; c1: [a 6] c1.c2: [a 5] c2: p (a); a = a + 1;} x = -2*a + 5; } void main() { c1: x = p(7); }
![Recursion int p(int a) { c1: [a 7] c1.c2: [a ] if (…) { c1: [a 7] c1.c2+: [a ] a = a -1 ; c1: [a 6] c1.c2: [a 5] c2: p (a); a = a + 1;} x = -2*a + 5; } void main() { c1: x = p(7); }](http://images.slideplayer.com/16/4969737/slides/slide_39.jpg "Recursion int p(int a) { c1: [a 7] c1.c2: [a ] if (…) { c1: [a 7] c1.c2+: [a ] a = a -1 ; c1: [a 6] c1.c2: [a 5] c2: p (a); a = a + 1;} x = -2*a + 5; } void main() { c1: x = p(7); }")
40
Recursion int p(int a) { c1: [a 7] c1.c2+: [a ] if (…) { c1: [a 7] c1.c2+: [a ] a = a -1 ; c1: [a 6] c1.c2+: [a ] c2: p (a); a = a + 1; x = -2*a + 5; } void main() { c1: x = p(7); }
![Recursion int p(int a) { c1: [a 7] c1.c2+: [a ] if (…) { c1: [a 7] c1.c2+: [a ] a = a -1 ; c1: [a 6] c1.c2+: [a ] c2: p (a); a = a + 1; x = -2*a + 5; } void main() { c1: x = p(7); }](http://images.slideplayer.com/16/4969737/slides/slide_40.jpg "Recursion int p(int a) { c1: [a 7] c1.c2+: [a ] if (…) { c1: [a 7] c1.c2+: [a ] a = a -1 ; c1: [a 6] c1.c2+: [a ] c2: p (a); a = a + 1; x = -2*a + 5; } void main() { c1: x = p(7); }")
41
int p(int a) { c1: [a 7] c1.c2+: [a ] if (…) { c1: [a 7] c1.c2+: [a ] a = a -1 ; c1: [a 6] c1.c2+: [a ] c2: p (a); a = a + 1;} c1: [a 7] c1.c2+: [a ] x = -2*a + 5; c1: [a 7, x -9] c1.c2+: [a , x ] } void main() { c1: x = p(7); }
![int p(int a) { c1: [a 7] c1.c2+: [a ] if (…) { c1: [a 7] c1.c2+: [a ] a = a -1 ; c1: [a 6] c1.c2+: [a ] c2: p (a); a = a + 1;} c1: [a 7] c1.c2+: [a ] x = -2*a + 5; c1: [a 7, x -9] c1.c2+: [a , x ] } void main() { c1: x = p(7); }](http://images.slideplayer.com/16/4969737/slides/slide_41.jpg "int p(int a) { c1: [a 7] c1.c2+: [a ] if (…) { c1: [a 7] c1.c2+: [a ] a = a -1 ; c1: [a 6] c1.c2+: [a ] c2: p (a); a = a + 1;} c1: [a 7] c1.c2+: [a ] x = -2*a + 5; c1: [a 7, x -9] c1.c2+: [a , x ] } void main() { c1: x = p(7); }")
42
int p(int a) { c1: [a 7] c1.c2+: [a ] if (…) { c1: [a 7] c1.c2+: [a ] a = a -1 ; c1: [a 6] c1.c2+: [a ] c2: p (a); c1.c2+: [a , x ] a = a + 1; } c1: [a 7] c1.c2+: [a ] x = -2*a + 5; c1: [a 7, x -9] c1.c2+: [a , x ] } void main() { c1: x = p(7); }
![int p(int a) { c1: [a 7] c1.c2+: [a ] if (…) { c1: [a 7] c1.c2+: [a ] a = a -1 ; c1: [a 6] c1.c2+: [a ] c2: p (a); c1.c2+: [a , x ] a = a + 1; } c1: [a 7] c1.c2+: [a ] x = -2*a + 5; c1: [a 7, x -9] c1.c2+: [a , x ] } void main() { c1: x = p(7); }](http://images.slideplayer.com/16/4969737/slides/slide_42.jpg "int p(int a) { c1: [a 7] c1.c2+: [a ] if (…) { c1: [a 7] c1.c2+: [a ] a = a -1 ; c1: [a 6] c1.c2+: [a ] c2: p (a); c1.c2+: [a , x ] a = a + 1; } c1: [a 7] c1.c2+: [a ] x = -2*a + 5; c1: [a 7, x -9] c1.c2+: [a , x ] } void main() { c1: x = p(7); }")
43
int p(int a) { c1: [a 7] c1.c2+: [a ] if (…) { c1: [a 7] c1.c2+: [a ] a = a -1 ; c1: [a 6] c1.c2+: [a ] c2: p (a); c1.c2+: [a , x ] a = a + 1; c1.c2+: [a , x ] } c1: [a 7] c1.c2+: [a ] x = -2*a + 5; c1: [a 7, x -9] c1.c2+: [a , x ] } void main() { c1: x = p(7); }
![int p(int a) { c1: [a 7] c1.c2+: [a ] if (…) { c1: [a 7] c1.c2+: [a ] a = a -1 ; c1: [a 6] c1.c2+: [a ] c2: p (a); c1.c2+: [a , x ] a = a + 1; c1.c2+: [a , x ] } c1: [a 7] c1.c2+: [a ] x = -2*a + 5; c1: [a 7, x -9] c1.c2+: [a , x ] } void main() { c1: x = p(7); }](http://images.slideplayer.com/16/4969737/slides/slide_43.jpg "int p(int a) { c1: [a 7] c1.c2+: [a ] if (…) { c1: [a 7] c1.c2+: [a ] a = a -1 ; c1: [a 6] c1.c2+: [a ] c2: p (a); c1.c2+: [a , x ] a = a + 1; c1.c2+: [a , x ] } c1: [a 7] c1.c2+: [a ] x = -2*a + 5; c1: [a 7, x -9] c1.c2+: [a , x ] } void main() { c1: x = p(7); }")
44
int p(int a) { c1: [a 7] c1.c2+: [a ] if (…) { c1: [a 7] c1.c2+: [a ] a = a -1 ; c1: [a 6] c1.c2+: [a ] c2: p (a); c1: [a , x ] a = a + 1; c1.c2+: [a , x ] c1: [a , x ] } c1: [a 7] c1.c2+: [a ] x = -2*a + 5; c1: [a , x ] c1.c2+: [a , x ] } void main() { c1: x = p(7); }
![int p(int a) { c1: [a 7] c1.c2+: [a ] if (…) { c1: [a 7] c1.c2+: [a ] a = a -1 ; c1: [a 6] c1.c2+: [a ] c2: p (a); c1: [a , x ] a = a + 1; c1.c2+: [a , x ] c1: [a , x ] } c1: [a 7] c1.c2+: [a ] x = -2*a + 5; c1: [a , x ] c1.c2+: [a , x ] } void main() { c1: x = p(7); }](http://images.slideplayer.com/16/4969737/slides/slide_44.jpg "int p(int a) { c1: [a 7] c1.c2+: [a ] if (…) { c1: [a 7] c1.c2+: [a ] a = a -1 ; c1: [a 6] c1.c2+: [a ] c2: p (a); c1: [a , x ] a = a + 1; c1.c2+: [a , x ] c1: [a , x ] } c1: [a 7] c1.c2+: [a ] x = -2*a + 5; c1: [a , x ] c1.c2+: [a , x ] } void main() { c1: x = p(7); }")
45
int p(int a) { c1: [a 7] c1.c2+: [a ] if (…) { c1: [a 7] c1.c2+: [a ] a = a -1 ; c1: [a 6] c1.c2+: [a ] c2: p (a); c1.c2*: [a ] a = a + 1; c1.c2*: [a ] } c1.c2*: [a ] x = -2*a + 5; c1.c2*: [a , x ] } void main() { c1: p(7); : [x ] }
![int p(int a) { c1: [a 7] c1.c2+: [a ] if (…) { c1: [a 7] c1.c2+: [a ] a = a -1 ; c1: [a 6] c1.c2+: [a ] c2: p (a); c1.c2*: [a ] a = a + 1; c1.c2*: [a ] } c1.c2*: [a ] x = -2*a + 5; c1.c2*: [a , x ] } void main() { c1: p(7); : [x ] }](http://images.slideplayer.com/16/4969737/slides/slide_45.jpg "int p(int a) { c1: [a 7] c1.c2+: [a ] if (…) { c1: [a 7] c1.c2+: [a ] a = a -1 ; c1: [a 6] c1.c2+: [a ] c2: p (a); c1.c2*: [a ] a = a + 1; c1.c2*: [a ] } c1.c2*: [a ] x = -2*a + 5; c1.c2*: [a , x ] } void main() { c1: p(7); : [x ] }")
46
Summary Call String Easy to implement Efficient for very small call strings Too expensive even for call strings of length 3 For finite domains can be precise even with recursion Limited precision Order of calls can be abstracted Related method: procedure cloning

47
Interprocedural analysis sRsR n1n1 n3n3 n2n2 f1f1 f3f3 f2f2 f1f1 eReR f3f3 sPsP n5n5 n4n4 f1f1 ePeP f5f5 P R Call Q f c2e f x2r Call node Return node Entry node Exit node sQsQ n7n7 n6n6 f1f1 eQeQ f6f6 Q Call Q Call node Return node f c2e f x2r f1f1 Supergraph

48
paths(n) the set of paths from s to n –( (s,n 1 ), (n 1,n 3 ), (n 3,n 1 ) ) Paths s n1n1 n3n3 n2n2 f1f1 f1f1 f3f3 f2f2 f1f1 e f3f3
 the set of paths from s to n –( (s,n 1 ), (n 1,n 3 ), (n 3,n 1 ) ) Paths s n1n1 n3n3 n2n2 f1f1 f1f1 f3f3 f2f2 f1f1 e f3f3")
49
Interprocedural Valid Paths () f1f1 f2f2 f k-1 fkfk f3f3 f4f4 f5f5 f k-2 f k-3 call q enter q exit q ret IVP: all paths with matching calls and returns –And prefixes
 f1f1 f2f2 f k-1 fkfk f3f3 f4f4 f5f5 f k-2 f k-3 call q enter q exit q ret IVP: all paths with matching calls and returns –And prefixes")
50
Interprocedural Valid Paths IVP set of paths –Start at program entry Only considers matching calls and returns –aka, valid Can be defined via context free grammar –matched ::= matched ( i matched ) i | ε –valid ::= valid ( i matched | matched paths can be defined by a regular expression
 i | ε –valid ::= valid ( i matched | matched paths can be defined by a regular expression")
51
Join Over All Paths (JOP) start n i JOP[v] = {[[e 1, e 2, …,e n ]]( ) | (e 1, …, e n ) paths(v)} JOP LFP –Sometimes JOP = LFP precise up to “symbolic execution” Distributive problem L L
![Join Over All Paths (JOP) start n i JOP[v] = {[[e 1, e 2, …,e n ]]( ) | (e 1, …, e n ) paths(v)} JOP LFP –Sometimes JOP = LFP precise up to symbolic execution Distributive problem L L](http://images.slideplayer.com/16/4969737/slides/slide_51.jpg "Join Over All Paths (JOP) start n i JOP[v] = {[[e 1, e 2, …,e n ]]( ) | (e 1, …, e n ) paths(v)} JOP LFP –Sometimes JOP = LFP precise up to symbolic execution Distributive problem L L")
52
The Join-Over-Valid-Paths (JVP) vpaths(n) all valid paths from program start to n JVP[n] = {[[e 1, e 2, …, e]]( ) (e 1, e 2, …, e) vpaths(n)} JVP JFP –In some cases the JVP can be computed –(Distributive problem)
![The Join-Over-Valid-Paths (JVP) vpaths(n) all valid paths from program start to n JVP[n] = {[[e 1, e 2, …, e]]( ) (e 1, e 2, …, e) vpaths(n)} JVP JFP –In some cases the JVP can be computed –(Distributive problem)](http://images.slideplayer.com/16/4969737/slides/slide_52.jpg "The Join-Over-Valid-Paths (JVP) vpaths(n) all valid paths from program start to n JVP[n] = {[[e 1, e 2, …, e]]( ) (e 1, e 2, …, e) vpaths(n)} JVP JFP –In some cases the JVP can be computed –(Distributive problem)")
53
The Functional Approach The meaning of a procedure is mapping from states into states The abstract meaning of a procedure is function from an abstract state to abstract states Relation between input and output In certain cases can compute JVP

54
The Functional Approach Two phase algorithm –Compute the dataflow solution at the exit of a procedure as a function of the initial values at the procedure entry (functional values) –Compute the dataflow values at every point using the functional values
 –Compute the dataflow values at every point using the functional values")
55
Phase 1 int p(int a) { [a a 0, x x 0 ] if (…) { a = a -1 ; p (a); a = a + 1; { x = -2*a + 5; [a a 0, x -2a 0 + 5] } void main() { p(7); }
![Phase 1 int p(int a) { [a a 0, x x 0 ] if (…) { a = a -1 ; p (a); a = a + 1; { x = -2*a + 5; [a a 0, x -2a 0 + 5] } void main() { p(7); }](http://images.slideplayer.com/16/4969737/slides/slide_55.jpg "Phase 1 int p(int a) { [a a 0, x x 0 ] if (…) { a = a -1 ; p (a); a = a + 1; { x = -2*a + 5; [a a 0, x -2a 0 + 5] } void main() { p(7); }")
56
Phase 1 int p(int a) { [a a 0, x x 0 ] if (…) { a = a -1 ; p (a); a = a + 1; { [a a 0, x x 0 ] x = -2*a + 5; } void main() { p(7); }
![Phase 1 int p(int a) { [a a 0, x x 0 ] if (…) { a = a -1 ; p (a); a = a + 1; { [a a 0, x x 0 ] x = -2*a + 5; } void main() { p(7); }](http://images.slideplayer.com/16/4969737/slides/slide_56.jpg "Phase 1 int p(int a) { [a a 0, x x 0 ] if (…) { a = a -1 ; p (a); a = a + 1; { [a a 0, x x 0 ] x = -2*a + 5; } void main() { p(7); }")
57
Phase 1 int p(int a) { [a a 0, x x 0 ] if (…) { a = a -1 ; p (a); a = a + 1; { [a a 0, x x 0 ] x = -2*a + 5; [a a 0, x -2a 0 + 5] } void main() { p(7); }
![Phase 1 int p(int a) { [a a 0, x x 0 ] if (…) { a = a -1 ; p (a); a = a + 1; { [a a 0, x x 0 ] x = -2*a + 5; [a a 0, x -2a 0 + 5] } void main() { p(7); }](http://images.slideplayer.com/16/4969737/slides/slide_57.jpg "Phase 1 int p(int a) { [a a 0, x x 0 ] if (…) { a = a -1 ; p (a); a = a + 1; { [a a 0, x x 0 ] x = -2*a + 5; [a a 0, x -2a 0 + 5] } void main() { p(7); }")
58
Phase 1 int p(int a) { [a a 0, x x 0 ] if (…) { a = a -1 ; [a a 0 -1, x x 0 ] p (a); a = a + 1; { [a a 0, x x 0 ] x = -2*a + 5; [a a 0, x -2a 0 + 5] } void main() { p(7); }
![Phase 1 int p(int a) { [a a 0, x x 0 ] if (…) { a = a -1 ; [a a 0 -1, x x 0 ] p (a); a = a + 1; { [a a 0, x x 0 ] x = -2*a + 5; [a a 0, x -2a 0 + 5] } void main() { p(7); }](http://images.slideplayer.com/16/4969737/slides/slide_58.jpg "Phase 1 int p(int a) { [a a 0, x x 0 ] if (…) { a = a -1 ; [a a 0 -1, x x 0 ] p (a); a = a + 1; { [a a 0, x x 0 ] x = -2*a + 5; [a a 0, x -2a 0 + 5] } void main() { p(7); }")
59
Phase 1 int p(int a) { [a a 0, x x 0 ] if (…) { a = a -1 ; [a a 0 -1, x x 0 ] p (a); [a a 0 -1, x -2a 0 +7] a = a + 1; { [a a 0, x x 0 ] x = -2*a + 5; [a a 0, x -2a 0 + 5] } void main() { p(7); }
![Phase 1 int p(int a) { [a a 0, x x 0 ] if (…) { a = a -1 ; [a a 0 -1, x x 0 ] p (a); [a a 0 -1, x -2a 0 +7] a = a + 1; { [a a 0, x x 0 ] x = -2*a + 5; [a a 0, x -2a 0 + 5] } void main() { p(7); }](http://images.slideplayer.com/16/4969737/slides/slide_59.jpg "Phase 1 int p(int a) { [a a 0, x x 0 ] if (…) { a = a -1 ; [a a 0 -1, x x 0 ] p (a); [a a 0 -1, x -2a 0 +7] a = a + 1; { [a a 0, x x 0 ] x = -2*a + 5; [a a 0, x -2a 0 + 5] } void main() { p(7); }")
60
Phase 1 int p(int a) { [a a 0, x x 0 ] if (…) { a = a -1 ; [a a 0 -1, x x 0 ] p (a); [a a 0 -1, x -2a 0 +7] a = a + 1; [a a 0, x -2a 0 +7] { [a a 0, x x 0 ] x = -2*a + 5; [a a 0, x -2a 0 + 5] } void main() { p(7); }
![Phase 1 int p(int a) { [a a 0, x x 0 ] if (…) { a = a -1 ; [a a 0 -1, x x 0 ] p (a); [a a 0 -1, x -2a 0 +7] a = a + 1; [a a 0, x -2a 0 +7] { [a a 0, x x 0 ] x = -2*a + 5; [a a 0, x -2a 0 + 5] } void main() { p(7); }](http://images.slideplayer.com/16/4969737/slides/slide_60.jpg "Phase 1 int p(int a) { [a a 0, x x 0 ] if (…) { a = a -1 ; [a a 0 -1, x x 0 ] p (a); [a a 0 -1, x -2a 0 +7] a = a + 1; [a a 0, x -2a 0 +7] { [a a 0, x x 0 ] x = -2*a + 5; [a a 0, x -2a 0 + 5] } void main() { p(7); }")
61
Phase 1 int p(int a) { [a a 0, x x 0 ] if (…) { a = a -1 ; [a a 0 -1, x x 0 ] p (a); [a a 0 -1, x -2a 0 +7] a = a + 1; [a a 0, x -2a 0 +7] { [a a 0, x ] x = -2*a + 5; [a a 0, x -2a 0 + 5] } void main() { p(7); }
![Phase 1 int p(int a) { [a a 0, x x 0 ] if (…) { a = a -1 ; [a a 0 -1, x x 0 ] p (a); [a a 0 -1, x -2a 0 +7] a = a + 1; [a a 0, x -2a 0 +7] { [a a 0, x ] x = -2*a + 5; [a a 0, x -2a 0 + 5] } void main() { p(7); }](http://images.slideplayer.com/16/4969737/slides/slide_61.jpg "Phase 1 int p(int a) { [a a 0, x x 0 ] if (…) { a = a -1 ; [a a 0 -1, x x 0 ] p (a); [a a 0 -1, x -2a 0 +7] a = a + 1; [a a 0, x -2a 0 +7] { [a a 0, x ] x = -2*a + 5; [a a 0, x -2a 0 + 5] } void main() { p(7); }")
62
Phase 1 int p(int a) { [a a 0, x x 0 ] if (…) { a = a -1 ; [a a 0 -1, x x 0 ] p (a); [a a 0 -1, x -2a 0 +7] a = a + 1; [a a 0, x -2a 0 +7] { [a a 0, x ] x = -2*a + 5; [a a 0, x -2a 0 + 5] } void main() { p(7); }
![Phase 1 int p(int a) { [a a 0, x x 0 ] if (…) { a = a -1 ; [a a 0 -1, x x 0 ] p (a); [a a 0 -1, x -2a 0 +7] a = a + 1; [a a 0, x -2a 0 +7] { [a a 0, x ] x = -2*a + 5; [a a 0, x -2a 0 + 5] } void main() { p(7); }](http://images.slideplayer.com/16/4969737/slides/slide_62.jpg "Phase 1 int p(int a) { [a a 0, x x 0 ] if (…) { a = a -1 ; [a a 0 -1, x x 0 ] p (a); [a a 0 -1, x -2a 0 +7] a = a + 1; [a a 0, x -2a 0 +7] { [a a 0, x ] x = -2*a + 5; [a a 0, x -2a 0 + 5] } void main() { p(7); }")
63
Phase 2 int p(int a) { [a 7, x 0] if (…) { a = a -1 ; p (a); a = a + 1; { x = -2*a + 5; } void main() { p(7); [x -9] } p(a 0,x 0 ) = [a a 0, x -2a 0 + 5]
![Phase 2 int p(int a) { [a 7, x 0] if (…) { a = a -1 ; p (a); a = a + 1; { x = -2*a + 5; } void main() { p(7); [x -9] } p(a 0,x 0 ) = [a a 0, x -2a 0 + 5]](http://images.slideplayer.com/16/4969737/slides/slide_63.jpg "Phase 2 int p(int a) { [a 7, x 0] if (…) { a = a -1 ; p (a); a = a + 1; { x = -2*a + 5; } void main() { p(7); [x -9] } p(a 0,x 0 ) = [a a 0, x -2a 0 + 5]")
64
Phase 2 int p(int a) { [a 7, x 0] if (…) { a = a -1 ; p (a); a = a + 1; { [a 7, x 0] x = -2*a + 5; } void main() { p(7); [x -9] } p(a 0,x 0 ) = [a a 0, x -2a 0 + 5]
![Phase 2 int p(int a) { [a 7, x 0] if (…) { a = a -1 ; p (a); a = a + 1; { [a 7, x 0] x = -2*a + 5; } void main() { p(7); [x -9] } p(a 0,x 0 ) = [a a 0, x -2a 0 + 5]](http://images.slideplayer.com/16/4969737/slides/slide_64.jpg "Phase 2 int p(int a) { [a 7, x 0] if (…) { a = a -1 ; p (a); a = a + 1; { [a 7, x 0] x = -2*a + 5; } void main() { p(7); [x -9] } p(a 0,x 0 ) = [a a 0, x -2a 0 + 5]")
65
Phase 2 int p(int a) { [a 7, x 0] if (…) { a = a -1 ; p (a); a = a + 1; { [a 7, x 0] x = -2*a + 5; [a 7, x -9] } void main() { p(7); [x -9] } p(a 0,x 0 ) = [a a 0, x -2a 0 + 5]
![Phase 2 int p(int a) { [a 7, x 0] if (…) { a = a -1 ; p (a); a = a + 1; { [a 7, x 0] x = -2*a + 5; [a 7, x -9] } void main() { p(7); [x -9] } p(a 0,x 0 ) = [a a 0, x -2a 0 + 5]](http://images.slideplayer.com/16/4969737/slides/slide_65.jpg "Phase 2 int p(int a) { [a 7, x 0] if (…) { a = a -1 ; p (a); a = a + 1; { [a 7, x 0] x = -2*a + 5; [a 7, x -9] } void main() { p(7); [x -9] } p(a 0,x 0 ) = [a a 0, x -2a 0 + 5]")
66
Phase 2 int p(int a) { [a 7, x 0] if (…) { a = a -1 ; [a 6, x 0] p (a); a = a + 1; { [a 7, x 0] x = -2*a + 5; [a 7, x -9] } void main() { p(7); [x -9] } p(a 0,x 0 ) = [a a 0, x -2a 0 + 5]
![Phase 2 int p(int a) { [a 7, x 0] if (…) { a = a -1 ; [a 6, x 0] p (a); a = a + 1; { [a 7, x 0] x = -2*a + 5; [a 7, x -9] } void main() { p(7); [x -9] } p(a 0,x 0 ) = [a a 0, x -2a 0 + 5]](http://images.slideplayer.com/16/4969737/slides/slide_66.jpg "Phase 2 int p(int a) { [a 7, x 0] if (…) { a = a -1 ; [a 6, x 0] p (a); a = a + 1; { [a 7, x 0] x = -2*a + 5; [a 7, x -9] } void main() { p(7); [x -9] } p(a 0,x 0 ) = [a a 0, x -2a 0 + 5]")
67
Phase 2 int p(int a) { [a 7, x 0] if (…) { a = a -1 ; [a 6, x 0] p (a); [a 6, x -9] a = a + 1; { [a 7, x 0] x = -2*a + 5; [a 7, x -9] } void main() { p(7); [x -9] } p(a 0,x 0 ) = [a a 0, x -2a 0 + 5]
![Phase 2 int p(int a) { [a 7, x 0] if (…) { a = a -1 ; [a 6, x 0] p (a); [a 6, x -9] a = a + 1; { [a 7, x 0] x = -2*a + 5; [a 7, x -9] } void main() { p(7); [x -9] } p(a 0,x 0 ) = [a a 0, x -2a 0 + 5]](http://images.slideplayer.com/16/4969737/slides/slide_67.jpg "Phase 2 int p(int a) { [a 7, x 0] if (…) { a = a -1 ; [a 6, x 0] p (a); [a 6, x -9] a = a + 1; { [a 7, x 0] x = -2*a + 5; [a 7, x -9] } void main() { p(7); [x -9] } p(a 0,x 0 ) = [a a 0, x -2a 0 + 5]")
68
Phase 2 int p(int a) { [a 7, x 0] if (…) { a = a -1 ; [a 6, x 0] p (a); [a 6, x -9] a = a + 1; [a 7, x -9] { [a 7, x 0] x = -2*a + 5; [a 7, x -9] } void main() { p(7); [x -9] } p(a 0,x 0 ) = [a a 0, x -2a 0 + 5]
![Phase 2 int p(int a) { [a 7, x 0] if (…) { a = a -1 ; [a 6, x 0] p (a); [a 6, x -9] a = a + 1; [a 7, x -9] { [a 7, x 0] x = -2*a + 5; [a 7, x -9] } void main() { p(7); [x -9] } p(a 0,x 0 ) = [a a 0, x -2a 0 + 5]](http://images.slideplayer.com/16/4969737/slides/slide_68.jpg "Phase 2 int p(int a) { [a 7, x 0] if (…) { a = a -1 ; [a 6, x 0] p (a); [a 6, x -9] a = a + 1; [a 7, x -9] { [a 7, x 0] x = -2*a + 5; [a 7, x -9] } void main() { p(7); [x -9] } p(a 0,x 0 ) = [a a 0, x -2a 0 + 5]")
69
Phase 2 int p(int a) { [a 7, x 0] if (…) { a = a -1 ; [a 6, x 0] p (a); [a 6, x -9] a = a + 1; [a 7, x -9] { [a 7, x ] x = -2*a + 5; [a 7, x -9] } void main() { p(7); [x -9] } p(a 0,x 0 ) = [a a 0, x -2a 0 + 5]
![Phase 2 int p(int a) { [a 7, x 0] if (…) { a = a -1 ; [a 6, x 0] p (a); [a 6, x -9] a = a + 1; [a 7, x -9] { [a 7, x ] x = -2*a + 5; [a 7, x -9] } void main() { p(7); [x -9] } p(a 0,x 0 ) = [a a 0, x -2a 0 + 5]](http://images.slideplayer.com/16/4969737/slides/slide_69.jpg "Phase 2 int p(int a) { [a 7, x 0] if (…) { a = a -1 ; [a 6, x 0] p (a); [a 6, x -9] a = a + 1; [a 7, x -9] { [a 7, x ] x = -2*a + 5; [a 7, x -9] } void main() { p(7); [x -9] } p(a 0,x 0 ) = [a a 0, x -2a 0 + 5]")
70
Phase 2 int p(int a) { [a 7, x 0] if (…) { a = a -1 ; [a 6, x 0] p (a); [a 6, x -9] a = a + 1; [a 7, x -9] { [a 7, x ] x = -2*a + 5; [a 7, x -9] } void main() { p(7); [x -9] } p(a 0,x 0 ) = [a a 0, x -2a 0 + 5]
![Phase 2 int p(int a) { [a 7, x 0] if (…) { a = a -1 ; [a 6, x 0] p (a); [a 6, x -9] a = a + 1; [a 7, x -9] { [a 7, x ] x = -2*a + 5; [a 7, x -9] } void main() { p(7); [x -9] } p(a 0,x 0 ) = [a a 0, x -2a 0 + 5]](http://images.slideplayer.com/16/4969737/slides/slide_70.jpg "Phase 2 int p(int a) { [a 7, x 0] if (…) { a = a -1 ; [a 6, x 0] p (a); [a 6, x -9] a = a + 1; [a 7, x -9] { [a 7, x ] x = -2*a + 5; [a 7, x -9] } void main() { p(7); [x -9] } p(a 0,x 0 ) = [a a 0, x -2a 0 + 5]")
71
Phase 2 int p(int a) { [a 7, x 0] [a 6, x 0] if (…) { a = a -1 ; [a 6, x 0] p (a); [a 6, x -9] a = a + 1; [a 7, x -9] { [a 7, x ] x = -2*a + 5; [a 7, x -9] } void main() { p(7); [x -9] } p(a 0,x 0 ) = [a a 0, x -2a 0 + 5]
![Phase 2 int p(int a) { [a 7, x 0] [a 6, x 0] if (…) { a = a -1 ; [a 6, x 0] p (a); [a 6, x -9] a = a + 1; [a 7, x -9] { [a 7, x ] x = -2*a + 5; [a 7, x -9] } void main() { p(7); [x -9] } p(a 0,x 0 ) = [a a 0, x -2a 0 + 5]](http://images.slideplayer.com/16/4969737/slides/slide_71.jpg "Phase 2 int p(int a) { [a 7, x 0] [a 6, x 0] if (…) { a = a -1 ; [a 6, x 0] p (a); [a 6, x -9] a = a + 1; [a 7, x -9] { [a 7, x ] x = -2*a + 5; [a 7, x -9] } void main() { p(7); [x -9] } p(a 0,x 0 ) = [a a 0, x -2a 0 + 5]")
72
Phase 2 int p(int a) { [a , x 0] if (…) { a = a -1 ; [a 6, x 0] p (a); [a 6, x -9] a = a + 1; [a 7, x -9] { [a 7, x ] x = -2*a + 5; [a 7, x -9] } void main() { p(7); [x -9] } p(a 0,x 0 ) = [a a 0, x -2a 0 + 5]
![Phase 2 int p(int a) { [a , x 0] if (…) { a = a -1 ; [a 6, x 0] p (a); [a 6, x -9] a = a + 1; [a 7, x -9] { [a 7, x ] x = -2*a + 5; [a 7, x -9] } void main() { p(7); [x -9] } p(a 0,x 0 ) = [a a 0, x -2a 0 + 5]](http://images.slideplayer.com/16/4969737/slides/slide_72.jpg "Phase 2 int p(int a) { [a , x 0] if (…) { a = a -1 ; [a 6, x 0] p (a); [a 6, x -9] a = a + 1; [a 7, x -9] { [a 7, x ] x = -2*a + 5; [a 7, x -9] } void main() { p(7); [x -9] } p(a 0,x 0 ) = [a a 0, x -2a 0 + 5]")
73
Phase 2 int p(int a) { [a , x 0] if (…) { a = a -1 ; [a , x 0] p (a); [a 6, x -9] a = a + 1; [a 7, x -9] { [a 7, x ] x = -2*a + 5; [a 7, x -9] } void main() { p(7); [x -9] } p(a 0,x 0 ) = [a a 0, x -2a 0 + 5]
![Phase 2 int p(int a) { [a , x 0] if (…) { a = a -1 ; [a , x 0] p (a); [a 6, x -9] a = a + 1; [a 7, x -9] { [a 7, x ] x = -2*a + 5; [a 7, x -9] } void main() { p(7); [x -9] } p(a 0,x 0 ) = [a a 0, x -2a 0 + 5]](http://images.slideplayer.com/16/4969737/slides/slide_73.jpg "Phase 2 int p(int a) { [a , x 0] if (…) { a = a -1 ; [a , x 0] p (a); [a 6, x -9] a = a + 1; [a 7, x -9] { [a 7, x ] x = -2*a + 5; [a 7, x -9] } void main() { p(7); [x -9] } p(a 0,x 0 ) = [a a 0, x -2a 0 + 5]")
74
Phase 2 int p(int a) { [a , x 0] if (…) { a = a -1 ; [a , x 0] p (a); [a , x ] a = a + 1; [a 7, x -9] { [a 7, x ] x = -2*a + 5; [a 7, x -9] } void main() { p(7); [x -9] } p(a 0,x 0 ) = [a a 0, x -2a 0 + 5]
![Phase 2 int p(int a) { [a , x 0] if (…) { a = a -1 ; [a , x 0] p (a); [a , x ] a = a + 1; [a 7, x -9] { [a 7, x ] x = -2*a + 5; [a 7, x -9] } void main() { p(7); [x -9] } p(a 0,x 0 ) = [a a 0, x -2a 0 + 5]](http://images.slideplayer.com/16/4969737/slides/slide_74.jpg "Phase 2 int p(int a) { [a , x 0] if (…) { a = a -1 ; [a , x 0] p (a); [a , x ] a = a + 1; [a 7, x -9] { [a 7, x ] x = -2*a + 5; [a 7, x -9] } void main() { p(7); [x -9] } p(a 0,x 0 ) = [a a 0, x -2a 0 + 5]")
75
Phase 2 int p(int a) { [a , x 0] if (…) { a = a -1 ; [a , x 0] p (a); [a , x ] a = a + 1; [a , x ] { [a 7, x ] x = -2*a + 5; [a 7, x -9] } void main() { p(7); [x -9] } p(a 0,x 0 ) = [a a 0, x -2a 0 + 5]
![Phase 2 int p(int a) { [a , x 0] if (…) { a = a -1 ; [a , x 0] p (a); [a , x ] a = a + 1; [a , x ] { [a 7, x ] x = -2*a + 5; [a 7, x -9] } void main() { p(7); [x -9] } p(a 0,x 0 ) = [a a 0, x -2a 0 + 5]](http://images.slideplayer.com/16/4969737/slides/slide_75.jpg "Phase 2 int p(int a) { [a , x 0] if (…) { a = a -1 ; [a , x 0] p (a); [a , x ] a = a + 1; [a , x ] { [a 7, x ] x = -2*a + 5; [a 7, x -9] } void main() { p(7); [x -9] } p(a 0,x 0 ) = [a a 0, x -2a 0 + 5]")
76
Phase 2 int p(int a) { [a , x 0] if (…) { a = a -1 ; [a , x 0] p (a); [a , x ] a = a + 1; [a , x ] { [a , x ] x = -2*a + 5; [a 7, x -9] } void main() { p(7); [x -9] } p(a 0,x 0 ) = [a a 0, x -2a 0 + 5]
![Phase 2 int p(int a) { [a , x 0] if (…) { a = a -1 ; [a , x 0] p (a); [a , x ] a = a + 1; [a , x ] { [a , x ] x = -2*a + 5; [a 7, x -9] } void main() { p(7); [x -9] } p(a 0,x 0 ) = [a a 0, x -2a 0 + 5]](http://images.slideplayer.com/16/4969737/slides/slide_76.jpg "Phase 2 int p(int a) { [a , x 0] if (…) { a = a -1 ; [a , x 0] p (a); [a , x ] a = a + 1; [a , x ] { [a , x ] x = -2*a + 5; [a 7, x -9] } void main() { p(7); [x -9] } p(a 0,x 0 ) = [a a 0, x -2a 0 + 5]")
77
Phase 2 int p(int a) { [a , x 0] if (…) { a = a -1 ; [a , x 0] p (a); [a , x ] a = a + 1; [a , x ] { [a , x ] x = -2*a + 5; [a , x ] } void main() { p(7); [x -9] } p(a 0,x 0 ) = [a a 0, x -2a 0 + 5]
![Phase 2 int p(int a) { [a , x 0] if (…) { a = a -1 ; [a , x 0] p (a); [a , x ] a = a + 1; [a , x ] { [a , x ] x = -2*a + 5; [a , x ] } void main() { p(7); [x -9] } p(a 0,x 0 ) = [a a 0, x -2a 0 + 5]](http://images.slideplayer.com/16/4969737/slides/slide_77.jpg "Phase 2 int p(int a) { [a , x 0] if (…) { a = a -1 ; [a , x 0] p (a); [a , x ] a = a + 1; [a , x ] { [a , x ] x = -2*a + 5; [a , x ] } void main() { p(7); [x -9] } p(a 0,x 0 ) = [a a 0, x -2a 0 + 5]")
78
Summary Functional approach Computes procedure abstraction Sharing between different contexts Rather precise Recursive procedures may be more precise/efficient than loops But requires more from the implementation –Representing relations –Composing relations

79
Issues in Functional Approach How to guarantee that finite height for functional lattice? –It may happen that L has finite height and yet the lattice of monotonic function from L to L do not Efficiently represent functions –Functional join –Functional composition –Testing equality

80
A Complicated Example main() { a = 0; p(); print a; } p() { if (…) { a= a + 2 + sgn(a -100); p(); a – 1 ; }
 { a = 0; p(); print a; } p() { if (…) { a= a sgn(a -100); p(); a – 1 ; }")
81
CFL-Graph reachability Special cases of functional analysis Finite distributive lattices Provides more efficient analysis algorithms Reduce the interprocedural analysis problem to finding context free reachability

82
IDFS / IDE IDFS Interprocedural Distributive Finite Subset Precise interprocedural dataflow analysis via graph reachability. Reps, Horowitz, and Sagiv, POPL’95 IDE Interprocedural Distributive Environment Precise interprocedural dataflow analysis with applications to constant propagation. Reps, Horowitz, and Sagiv, FASE’95, TCS’96 –More general solutions exist

83
Possibly Uninitialized Variables Startx = 3 if... y = x y = w w = 8 printf(y) {w,x,y} {w,y} {w} {w,y} {} {w,y} {}
 {w,x,y} {w,y} {w} {w,y} {} {w,y} {}.")
84
Efficiently Representing Functions Let f:2 D 2 D be a distributive function Then: f(X) = f( ) {z X: f({z}) }
 = f( ) {z X: f({z}) }")
85
Representing Dataflow Functions Identity Function Constant Function a bc a bc

86
“Gen/Kill” Function Non-“Gen/Kill” Function a bc a bc Representing Dataflow Functions

87
x = 3 p(x,y) return from p printf(y) start main exit main start p(a,b) if... b = a p(a,b) return from p printf(b) exit p xy a b
 return from p printf(b) exit p xy a b.")
88
a bcbc a Composing Dataflow Functions bc a

89
x = 3 p(x,y) return from p start main exit main start p(a,b) if... b = a p(a,b) return from p exit p xy a b printf(y) Might b be uninitialized here? printf(b) NO! ( ] Might y be uninitialized here? YES! ( )
 return from p exit p xy a b printf(y) Might b be uninitialized here. printf(b) NO. ( ] Might y be uninitialized here. YES. ( ).")
90
Interprocedural Dataflow Analysis via CFL-Reachability Graph: Exploded control-flow graph L: L(unbalLeft) –unbalLeft = valid Fact d holds at n iff there is an L(unbalLeft)- path from
 –unbalLeft = valid Fact d holds at n iff there is an L(unbalLeft)- path from")
91
Asymptotic Running Time CFL-reachability –Exploded control-flow graph: ND nodes –Running time: O(N 3 D 3 ) Exploded control-flow graph Special structure Running time: O(ED 3 ) Typically: E l N, hence O(ED 3 ) l O(ND 3 ) “Gen/kill” problems: O(ED)
 Exploded control-flow graph Special structure Running time: O(ED 3 ) Typically: E l N, hence O(ED 3 ) l O(ND 3 ) Gen/kill problems: O(ED)")
92
a bcbc a Dataflow Flow Functions bc a

93
x = 3 p(x,y) return from p start main exit main start p(a,b) if... b = a p(a,b) return from p exit p xy a b printf(y) Might b be uninitialized here? printf(b) NO! ( ] Might y be uninitialized here? YES! ( )
 return from p exit p xy a b printf(y) Might b be uninitialized here. printf(b) NO. ( ] Might y be uninitialized here. YES. ( ).")
94
IDE Goes beyond IFDS problems –Can handle unbounded domains Requires special form of the domain Can be much more efficient than IFDS

95
Domain of environments Environments: Env(D,L) = D L –D finite set of program symbols –L finite height lattice E.g., map from variables (D) to values (L) e e’ = d.(e(d) e’(d) ) Top in Env(D,L) is d.

96
Environment transformers t: Env(D,L) Env(D,L) –t should be distributive d D: ( {t(e)|e E})(d) = (t( {(e) | e E}))(d) Must hold for inifinite sets E Env(D,L)
 Env(D,L) –t should be distributive d D: ( {t(e)|e E})(d) = (t( {(e) | e E}))(d) Must hold for inifinite sets E Env(D,L)")
97
IDE Problem IP=(G*,D,L,M) –G* supergraph –D, L as above –M assigns distributive transformers to E*
 –G* supergraph –D, L as above –M assigns distributive transformers to E*")
99
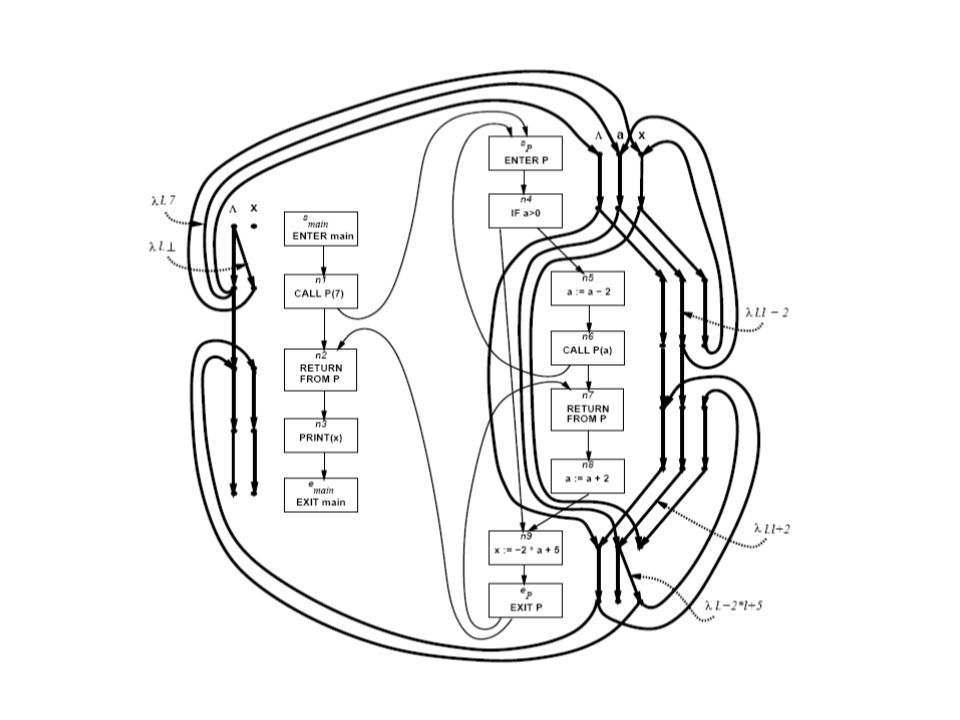
Point-wise representation of environments IFDS with “weights” Bi-partite graph –D { } D { } –R t (d’,d)= l. … t ( d. ) macro-function R t (d’,d) ( l.) micro-function a x l.l - 2 l.l x = a - 2 [[R t ]](env)(d)= f( … R t (, ) …)(d) t = [[R t ]]
 macro-function R t (d’,d) ( l.) micro-function a x l.l - 2 l.l x = a - 2 [[R t ]](env)(d)= f( … R t (, ) …)(d) t = [[R t ]].")
100
Point-wise representation of environments = top = bottom = join

101
Point-wise representation of environments [[R t ]](env)(d)=R t ( ,d)( ) ( d’ D R t (d’,d)(env(d’))) t = [[R t ]] = bottom = top
![Point-wise representation of environments [[R t ]](env)(d)=R t ( ,d)( ) ( d’ D R t (d’,d)(env(d’))) t = [[R t ]] = bottom = top](http://images.slideplayer.com/16/4969737/slides/slide_101.jpg "Point-wise representation of environments [[R t ]](env)(d)=R t ( ,d)( ) ( d’ D R t (d’,d)(env(d’))) t = [[R t ]] = bottom = top")
102
Example Linear Constant Propagation Consider the constant propagation lattice The value of every variable y at the program exit can be represented by: y = {(a x x + b x )| x Var * } c a x,c Z { , } b x Z Supports efficient composition and “functional” join –[z := a * y + b] –What about [z:=x+y]?
![Example Linear Constant Propagation Consider the constant propagation lattice The value of every variable y at the program exit can be represented by: y = {(a x x + b x )| x Var * } c a x,c Z { , } b x Z Supports efficient composition and functional join –[z := a * y + b] –What about [z:=x+y]](http://images.slideplayer.com/16/4969737/slides/slide_102.jpg "Example Linear Constant Propagation Consider the constant propagation lattice The value of every variable y at the program exit can be represented by: y = {(a x x + b x )| x Var * } c a x,c Z { , } b x Z Supports efficient composition and functional join –[z := a * y + b] –What about [z:=x+y]")
103
Linear constant propagation Point-wise representation of environment transformers

104
IDE Analysis Point-wise representation closed under composition CFL-Reachability on the exploded graph Compose functions

107
Costs O(ED 3 ) Class of value transformers F L L –id F –Finite height Representation scheme with (efficient) Application Composition Join Equality Storage
 Class of value transformers F L L –id F –Finite height Representation scheme with (efficient) Application Composition Join Equality Storage")
108
Conclusion Handling functions is crucial for abstract interpretation Virtual functions and exceptions complicate things But scalability is an issue –Small call strings –Small functional domains –Demand analysis

Similar presentations







>")




 –Unification.>")



 = (2 Vars, µ, ;,Vars, [, Å ) x := y op z in out F x := y op z (out) = out –>")



