Download presentation
Presentation is loading. Please wait.

1
Presented by David Stavens

2
Manipulation Planning Before: Want to move the robot from one configuration to another, around obstacles. Now: Want to robot to grasp some object and move it to a new location. If this is the only slide you see: – Key ideas very similar. Almost consider object to be another DOF in the configuration space.

3
Why is this hard? Example. Consider the robot on the left. Want to remove the bar from the “cage”. Cannot be done in one motion! (Also this paper operates in continuous spaces.) Bar Cage
 Bar Cage.")
4
Key Terms CP = Stable Placements of the Object CG = Valid Grasps of the Object by the Robot

5
Transit Paths A transit path is a path of the robot when it is NOT grasping the object. A transit path is in CP (recall: CP is the set of stable placements) – BUT not all paths in CP are transit paths. – Path must correspond to static object placement. A set of transit paths forms a manifold given a fixed object position.
 – BUT not all paths in CP are transit paths. – Path must correspond to static object placement. A set of transit paths forms a manifold given a fixed object position..")
6
Transfer Paths Analogously: – A path when the robot IS grasping the object. – Transfer paths are in CG (recall: valid grasps). As before, not all paths in CG are transfer paths. Paths must correspond to a static grasp. – Set of transfer paths forms a manifold for fixed grasp.
. As before, not all paths in CG are transfer paths. Paths must correspond to a static grasp. – Set of transfer paths forms a manifold for fixed grasp..")
7
Key Idea of the Paper Consider the intersection of CG and CP. – Corresponds to the configurations that are valid grasps paired with valid placements of the object. Essentially, the manipulator may “pick up” or “release” the object at these intersections. So: Connect CG CP components by transit and transfer paths. U

8
The Algorithm 1.Randomly generate a configuration. 2.Decide at random whether configuration will be used to expand within CG CP connected components OR connect components with transfer/transit paths. 3.Keep configuration if it links two or more components – Determine this by using more basic planner, as usual. U

9
C-Space Example CP = Valid Placements CG = Valid Grasps Transfer Path Transit Path U CP CG (Not exhaustively labeled.)
")
10
Example We connect these CG CP connected components via transfer or transit paths. Connected Components 2 and 3 (Can’t Rotate the Board) Connected component 1 Connected Component 4 U
 Connected component 1 Connected Component 4 U.")
11
Transfer/Transit Paths for Example Transfer Path Transit Path

12
Planning in CG CP Topology “Virtual Joint” between last link and object. Hard to sample into CG CP directly. Paper uses planner from prior work. U U

13
Paths in CG CP Technically these paths are NOT realizable since they correspond to a change in grasp and a change in object placement all at once. – Unless you’re throwing the object ;-) Paper shows these paths can always be decomposed into transfer and transit paths. – The “reduction property”. (Proved in different paper.) – Notice that reduction property is similar to the transformation process in the PRM Kinodynamics paper: ignore constraints and then transform to obey. U
 Paper shows these paths can always be decomposed into transfer and transit paths. – The reduction property . (Proved in different paper.) – Notice that reduction property is similar to the transformation process in the PRM Kinodynamics paper: ignore constraints and then transform to obey. U.")
14
Planning Transit/Transfer Paths Step 1 – Ignore dynamic object, compute roadmap. Step 2 – Remove edges blocked by object’s position. Step 3 – Search the roadmap with the following caveats:

15
Possible Search Outcomes Initial Roadmap No path regardless of the obstacle. Path exists regardless of the obstacle. Use Rapidly-exploring Random Trees (RRTs) to bypass obstacle.
 to bypass obstacle..")
16
Important Caveat (From Kris) Let C1 and C2 be two components. Let G1 and G2 be all grasps in C1 and C2. Let P1 and P2 be all placements in C1 and C2. If G1 and G2 disjoint: can’t use transfer paths. If P1 and P2 disjoint: can’t use transit paths. (I believe algorithm simply fails to find a connection in this case.)
.")
17
1, 2, 3 4, 5, 6 7, 8, 9

18
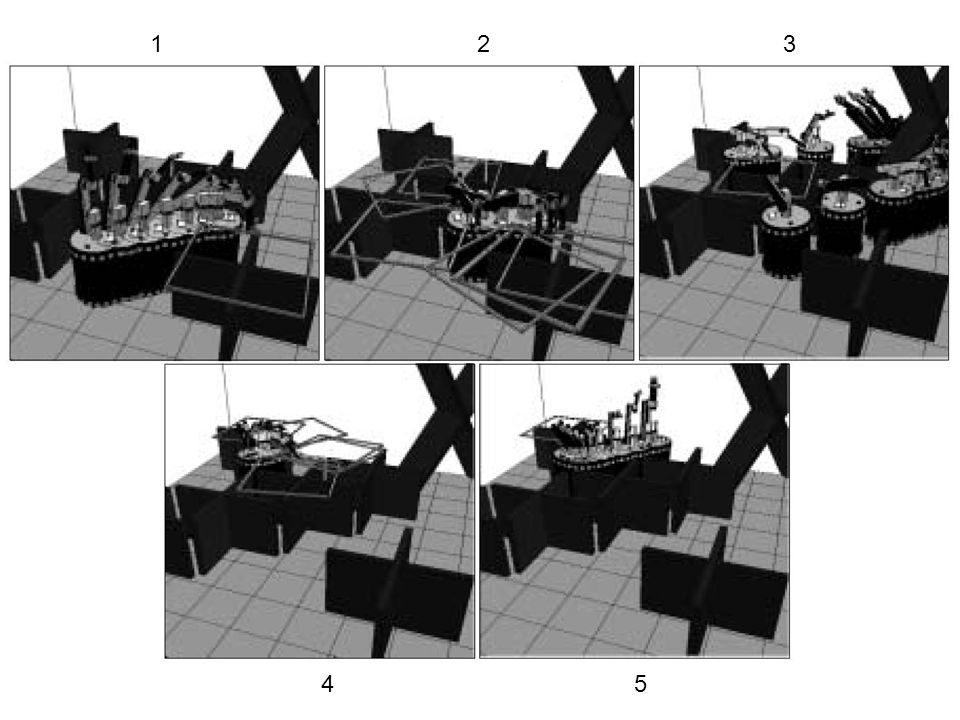
1 2 3 4 5
19
Random Choice of Connectivity Recall algorithm selects randomly whether it will use a generated configuration to expand within the CG CP connected components or to expand the inter-connectivity of those components. Probability of the former: – α ( 1 – estimated_coverage_ratio ) How they determine estimated coverage is cited. Perhaps like PRMs. U
 How they determine estimated coverage is cited. Perhaps like PRMs. U.")
20
Effect of α

21
Limitations How does this scale to multiple objects/robots? – (Does reduction property even work?) Maybe hierarchical planning is better: – Symbolic Task Planning – Geometric Manipulation Planning Assumes “pick and place”.
 Maybe hierarchical planning is better: – Symbolic Task Planning – Geometric Manipulation Planning Assumes pick and place ..")
22
A Note on Uncertainty What about uncertainty? – Object position is uncertain. – Robot motion is uncertain. – Proper locations to grasp object is uncertain. Paper assumes perception will handle this? – Hard problem in general, cluttered environments. Perhaps joint approach is needed that uses some manipulation and some perception.

23
Learning Valid Grasps (CG) Grasping Previously Unknown Objects More At: http://www.cs.stanford.edu/group/stair/multimedia.php STAIR Robot. Prof. Andrew Ng’s group.

Similar presentations









>")









