Download presentation
Presentation is loading. Please wait.

1
Communication Networks A Second Course Jean Walrand Department of EECS University of California at Berkeley

2
Stability Motivation Overview of results Linear Systems Nyquist Functional Differential Equations

3
Motivation Network is a controlled system Controls: MAC, Routing,Transport, … The system is nonlinear and has delays; the stability of the control system is non-trivial Many examples of instability of routing and transport We review key concepts and results on the stability of systems and we apply them to the transport protocols

4
Overview of Results Linear System Poles: x(n+1) = ax(n) + u(n) … |a| < 1 bibo Nyquist: feedback system, L(s) = K(s)G(s). Stable if L(j ) does not encircle – 1. (If L(j 0 ) = - 1 – < - 1, then input at 0 blows up.)
 does not encircle – 1. (If L(j 0 ) = - 1 – < - 1, then input at 0 blows up.).")
5
Overview of Results Nonlinear system Linearize around equilibrium x 0. If linearized system is stable, then x 0 is locally stable for original system Nonlinear system: Lyapunov Assume V(x(t)) decreases and level curves shrink Then the system is stable
) decreases and level curves shrink Then the system is stable.")
6
Overview of Results Markov Chain: Lyapunov Let x(t) be an irreducible Markov chain Assume V(x(t)) decreases by at least – < 0, on average, when x(t) is outside of a finite set A Then x(t) is positive recurrent
 be an irreducible Markov chain Assume V(x(t)) decreases by at least – < 0, on average, when x(t) is outside of a finite set A Then x(t) is positive recurrent")
7
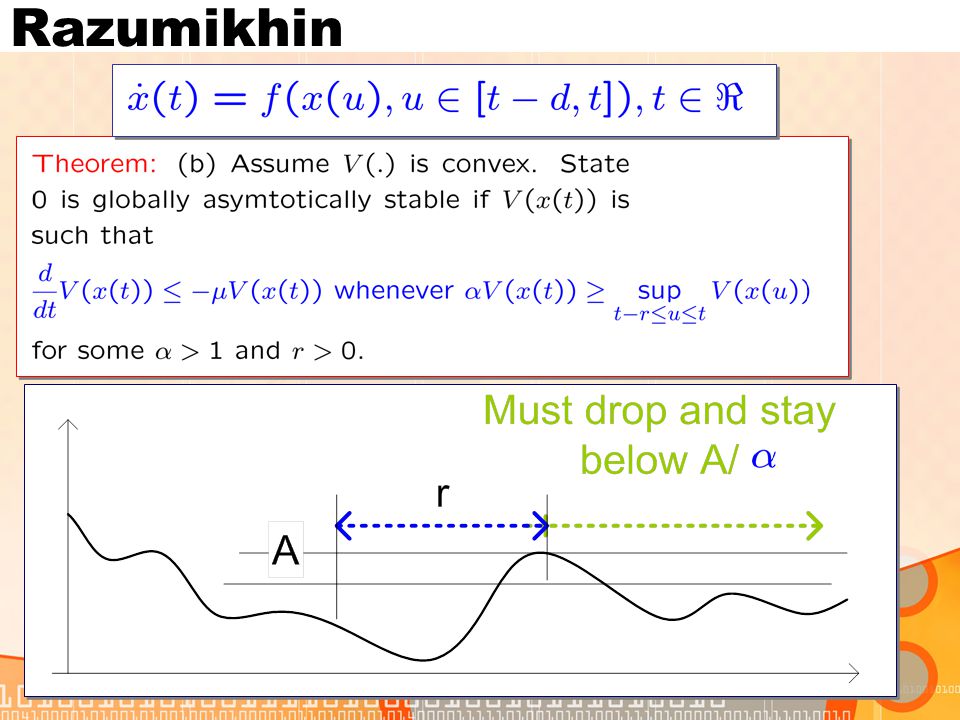
Overview of Results Functional Differential Equation: Assume V(x(t)) decreases whenever it reaches a maximum value over the last r seconds, then the system is stable…. [Razumikhin]

8
Linear Systems Laplace Transform

9
Linear Systems

10
Example

11
Linear Systems Example

12
Linear Systems Observation

13
Nyquist Slide from a tak by Glenn Vinnicombe

14
Nyquist

15
Slide from a tak by Glenn Vinnicombe

16
Nyquist MIMO Case:

17
Nyquist Example 1 Closed-Loop is stable

18
Nyquist Example 2

19
Nyquist Example 2 … Stable if T < 1.35s

20
Nyquist and Transport: 1 G. Vinnicombe, “On the stability of end-to-end control for the Internet.”

21
Nyquist and Transport: 2 F. Paganini, J. Doyle, S. Low, “Scalable Laws for Stable Network Congestion Control,” Proceedings of the 2001 CDC, Orlando,FL, 2001. Linearized System: Theorem:

22
Functional Differential Equations Consider the following nonlinear system with delay: We want a sufficient condition for stability of x(t) = x*. FDE

23
FDE: Example

24
FDE

25
Lyapunov Approach:

26
Razumikhin

28
FDE

29
FDE and Transport Z. Wang and F. Paganini, “Global Stability with Time-Delay in Network Congestion Control.” Recall linearized: Theorem: Nonlinear: Proof: Razumikhin ….

Similar presentations








 Richard Boucherie Stochastische Operations Research -- TW wwwhome.math.utwente.nl/~boucherierj/onderwijs/158052/158052.html.>")










