Download presentation
Presentation is loading. Please wait.

1
Chapter 13 Embedded Systems Patricia Roy Manatee Community College, Venice, FL ©2008, Prentice Hall Operating Systems: Internals and Design Principles, 6/E William Stallings

2
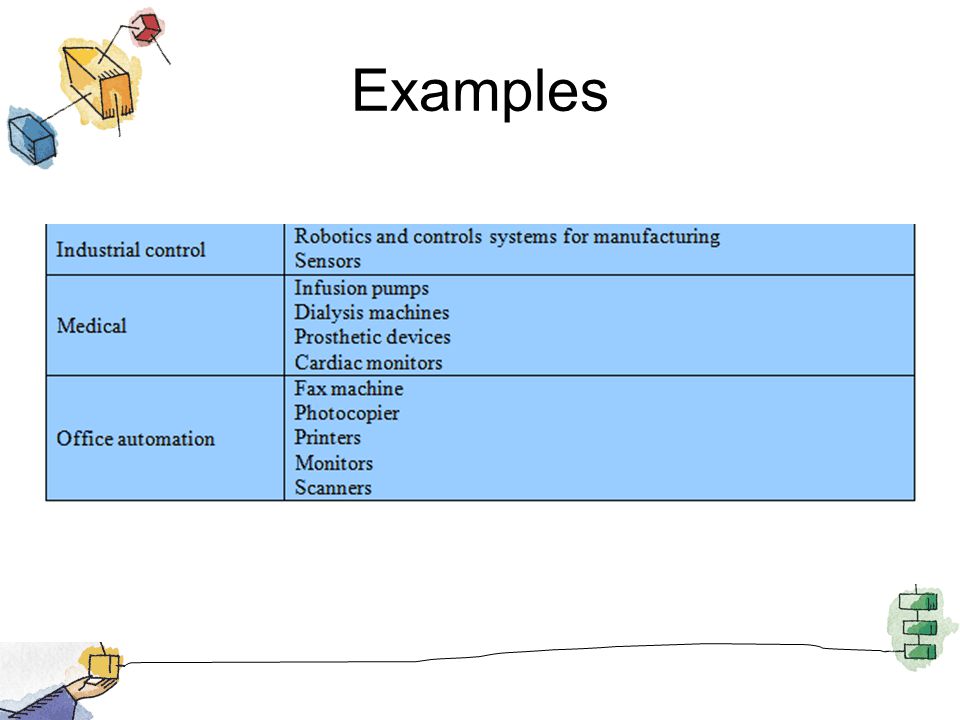
Embedded System Hardware and software designed to perform a dedicated function Tightly coupled to their environmnet

3
Examples

5
Embedded System Organization

6
Characteristics of Embedded Operating System Real-time operation Reactive operation –Respond to external events Configurability –Large variation in systems so need flexible configuration

7
Characteristics of Embedded Operating System I/O device flexibility Streamlined protection mechanisms Direct use of interrupts

8
Adapting an Existing OS Add real-time capability Streamlining operation Add necessary functionality

9
eCos Embedded Configurable Operating Systems Open source Royalty-free Real-time OS Most widely used embedded OS

10
eCos Configuration Tool

12
Loading an eCos Configuration

13
eCos Layered Structure

14
Hardware Abstraction Layer Presents consistent API to upper layers Different for each hardware platform

15
HAL

16
HAL Modules Architecture –Processor family type Variant –Support features of specific processor Platform –Support of tightly coupled peripherals

17
eCos Kernel Low interrupt latency Low task switching latency Small memory footprint Deterministic behavior

18
Not in eCos Kernel Memory allocation Device driver

19
eCos I/O System Framework for supporting device drivers

20
eCos Scheduler Bitmap scheduler –Efficient for small number of threads active –Each thread has different priority

21
Bitmap Scheduler

22
eCos Scheduler Multilevel queue scheduler –Appropriate when number of threads is dynamic –Multiple threads at each priority –Time slicing

23
Multilevel Queue Scheduler

24
eCos Thread Synchronization Mutexes Semaphores Condition variables

25
eCos Thread Synchronization Event flags Mailboxes Spinlocks –Useful in SMP (symmetric multiprocessing)
")
26
Mutexes

27
Mutexes and Condition Variables

29
TinyOS 400 bytes of code Not a real-time OS No kernel No memory protection

30
Tiny OS Component-based OS No processes No memory allocation Interrupt and exception handling dependent on peripheral Nonblocking

31
Wireless Sensor Network Topology

32
TinyOS Goals Allow high concurrency Operate with limited resources Adapt to hardware evolution

33
TinyOS Goals Support a wide range of applications Support a diverse set of platforms Be robust

34
TinyOS Components Single-hop networking Ad-hoc routing Power management Times Nonvolatile storage control

35
TimerM Component

36
TimerM Configuration

37
TinyOS Scheduler Operates across all components Only one task executes at one time Simple FIFO queue

38
Example TinyOS Appliction

40
TinyOS Resource Interface Dedicated Virtualized Shared

41
Shared Resource Configuration

Similar presentations