Download presentation
Presentation is loading. Please wait.

1
Control of Human Posture during Quiet Standing Motor Command of Proportional and Derivative (PD) Controller can Match Physiological Ankle Torque Modulation during Quiet Stance Albert H. Vette 1,2, Kei Masani 1,2, John F. Tan 1,2, Kimitaka Nakazawa 3, and Milos R. Popovic 1,2 June 19, 2007 1 IBBME, University of Toronto 2 Lyndhurst Centre, Toronto Rehab 3 National Rehabilitation Center for Persons with Disabilities, Tokorozawa, Japan

2
1. Motivation Complex system Much simpler than other related systems To extract key control features of the system Use the knowledge for rehabilitation purposes Why do we study the “Control of Human Posture during Quiet Standing”?

3
What do we actually know about the control of posture during quiet standing? Passive Torque Components: - result from intrinsic mechanical properties of the joints and muscles (stiffness and viscosity) (Loram, 2002; Casadio, 2005; Winter, 1998) Active Torque Components: - provided by muscle activity - regulated by higher or lower centers of the central nervous system (?) (Fitzpatrick, 1996; Morrasso, 1998; Peterka, 2000; Loram, 2002) 2. Background
 (Loram, 2002; Casadio, 2005; Winter, 1998) Active Torque Components: - provided by muscle activity - regulated by higher or lower centers of the central nervous system ( ) (Fitzpatrick, 1996; Morrasso, 1998; Peterka, 2000; Loram, 2002) 2. Background.")
4
Focus on anterior-posterior body sway -quiet standing can be approximated by an inverted pendulum model (Gage, 2004) -body is stabilized via ankle torque modulation In this study: COM Focus on active torque components only -for now, passive components are ignored
 -body is stabilized via ankle torque modulation In this study: COM Focus on active torque components only -for now, passive components are ignored")
5
Feedback time delay (τ F = ~40 ms) Motor command time delay (τ M = ~40 ms) Torque generation delay (τ E > 100 ms) 2. Background = delay of more than 180 ms Phase lead compensates delay Input: Angular body position (P) and velocity (D) Controlled variable: Body angle Controlling variable: Ankle torque PD Control Strategy: Sensory-Motor Time Delay: > 180 ms
 and velocity (D) Controlled variable: Body angle Controlling variable: Ankle torque PD Control Strategy: Sensory-Motor Time Delay: > 180 ms.")
6
3. Hypothesis “Modulation of PD Controlled Ankle Torque can Match Physiological Ankle Torque Modulation during Quiet Stance”

7
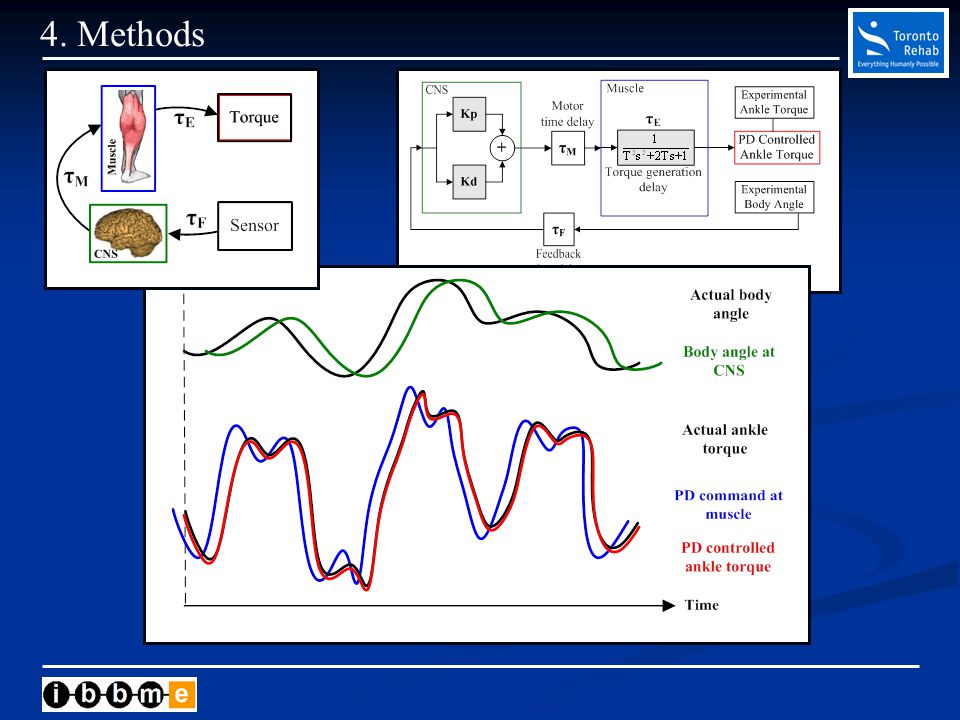
4. Methods PD Controlled Feedback Model Optimized parameters: 1) PD gains, i.e., Kp [Nm/rad] and Kd [Nm s/rad]; 2) Twitch contraction time T [ms].
 PD gains, i.e., Kp [Nm/rad] and Kd [Nm s/rad]; 2) Twitch contraction time T [ms]..")
8
Modeled as 2 nd order, critically damped system (low pass) Characteristics of muscle (Milner-Brown, 1973; Tani, 1996): 4. Methods

10
Quiet Standing Experiments (10 healthy subjects): Measurements: - Ground reaction forces (Kistler force plate) - Body angle (Keyence laser sensor) Tasks: - Quiet standing with eyes open (two trials of 60 s each) - Quiet standing with eyes closed (two trials of 60 s each) 4. Methods

11
Optimization: Optimization Technique - DIRECT algorithm (Perttunen, 1993) Optimization Procedure - First 30 seconds of experimental body angle and ankle torque data - Initial parameters: Kp = 350 Nm/rad, Kd = 750 Nm s/rad (Masani, 2006) T = 116 ms (Bellemare, 1983) Validation Procedure - Last 30 seconds of experimental body angle and ankle torque data - Optimized values for Kp, Kd, and T - Identification of error torque and matching percentage 4. Methods

12
5. Results Black: Experimental ankle torque; Red: PD controlled ankle torque (validation data)
")
13
5. Results Optimized Parameters PD Matching Capability

14
6. Conclusions PD controller can match ankle torque modulation during quiet stance - even true for large sensory-motor time delay of more than 180 ms Optimized PD gains agree with our previous findings (Masani, 2006) Optimized twitch contraction time is physiologically reasonable Present Findings: PD controller can at least mimic the sensory-motor control task during quiet standing (Masani, 2006; Vette, 2007) Control strategy may be used as part of a closed-loop FES system - rehabilitation (Thrasher, 2006) - assistive technology (Kim, 2006) With Previous Findings:
 Optimized twitch contraction time is physiologically reasonable Present Findings: PD controller can at least mimic the sensory-motor control task during quiet standing (Masani, 2006; Vette, 2007) Control strategy may be used as part of a closed-loop FES system - rehabilitation (Thrasher, 2006) - assistive technology (Kim, 2006) With Previous Findings:.")
15
S tanding approximated as inverted pendulum with active torque components only Limited to anterior-posterior stability Implementation in a 3D model with 12 degrees of freedom and passive torque components (Kim, 2006) Feed-forward control (internal model) contributes to human balance as well Implementation of PD controller in Smith’s predictor (Morasso, 1999) 7. Limitations and Future Work Limitations: Integration and re-weighting of sensory information omitted Body kinematics provided by weighted sensory input (Peterka, 2002)
.")
16
7. Limitations and Future Work Next Step: Implementation of passive torque components as well To be optimized: Kp, Kd, T, and passive stiffness K [Nm/rad] Range of K: 60 – 90 % of load stiffness (m*g*COM height) (Casadio, 2003) Passive viscosity B set to 5 Nm s/rad (Loram, 2002)
 (Casadio, 2003) Passive viscosity B set to 5 Nm s/rad (Loram, 2002).")
17
7. Limitations and Future Work Initial Results are Promising! Improvement of Torque Matching! Optimized parameters: Kp = ~ 150-250 Nm/radK = ~ 70-80% of load stiffness Kd = ~ 100-200 Nm s/radT = ~ 100 – 150 ms Kp and Kd naturally decrease – but neural controller still necessary! eyes open

18
Acknowledgments National Rehabilitation Center for Persons for Disabilities, Tokorozawa, Japan Dr. Milos Popovic and Dr. Kimitaka Nakazawa Masaki O. Abe, Dimitry Sayenko, and Alan Morris Funding Agencies: Thank You! Japan Society for the Promotion of Science German Academic Exchange Service

19
Any Questions? Control of Human Posture during Quiet Standing

20
Winter (1998): passive torque component are sufficient to stabilize the body during quiet standing. Morasso (2002): intrinsic ankle stiffness is too low to oppose the toppling effect of gravity. Loram (2002): passive torque components can only provide up to 91% of the necessary stiffness needed for minimal stabilization. ➔ additional active torque components are required – but how are they generated? 2. Background How do we actually control our body posture during quiet standing?
: intrinsic ankle stiffness is too low to oppose the toppling effect of gravity. Loram (2002): passive torque components can only provide up to 91% of the necessary stiffness needed for minimal stabilization. ➔ additional active torque components are required – but how are they generated. 2. Background How do we actually control our body posture during quiet standing .")
21
Feedback versus Feed-Forward Control Pro “feed-forward” control (via internal model): the neurological time delay seems to be too long for stable feedback control; the fluctuation of the motor command to the plantar flexors precedes the body sway fluctuation (e.g., Masani, 2003 ). Pro “feedback” control: no conclusive physiological evidence for feed-forward control; importance of sensory information during quiet standing has been frequently reported (e.g., Fitzpatrick, 1994a/b). Do not contradict feedback control 2. Background
. Do not contradict feedback control 2. Background.")
Similar presentations