Download presentation
Presentation is loading. Please wait.

1
CeilBot - Sports Hall Guillaume MERCIER Massinissa AIT-GHERBI

2
Plan Intro Ceilbot in Sports Hall ▫Environment ▫Tasks and characteritics ▫Obstacles ▫Challenges Ceilbot qualitative concept ▫Structure ▫Fonction ▫User interface ▫Modelisation Conclusion Definition & environment Requirements Challenges Obstacles Qualitative concept function (task) structure user interface Modelisation 3D blender annimation 3D ADAMS view simulation
 structure user interface Modelisation 3D blender annimation 3D ADAMS view simulation")
4
Intro What the ceilbot robot could do in different environments Focus the ideas into Sports Halls. First, identify qualitatively all the requirements, the challenges and the obstacles that the robot is going to face. In the second step, the basic function and definition of the structure and the conceptual user interface of the robot has been thought. In the third step, 3D drawing and model.

5
Environment Tasks and characteritics Obstacles Challenges

6
Definition of the environment Large space, and a big height. Full of pipes, wires, light sources. Width of the room is at least 15 to 20 m Length of such room is usually 35 to 40m There is at least one basketball playground in sport hall The main requirement for the robot is that it has to move on the ceiling, so one of the first questions to face is: How is the robot going to be attached to the ceiling in order to provide a good motion and safety for people?

7
Dimension of different playground

8
Definition of the environment Environment Task Robot How can we fix the robot on the ceiling ? The environment is now defined, our robot will have to move along a ceiling approximately 12m high avoiding, wires pipes light sources and sports goods. It is needed now to think about the robot task and then think about the robot itself.

9
Rail The grid is very large so the robot is not going everywhere. It can be a problem when it will have to record a game, if it can’t “see” from everywhere. The advantages of the solution, is that we are very close to a source of power. Indeed, it would be possible to plug the robot onto the electric network of the light system

10
Cable system - Bi cables in cross Ceilbot Robot Cables Actuators Ceilbot Robot Cables Actuators Using two cables stretched from one side to the other of the hall both equipped with actuator would permit to move the robot wherever it is needed. That system is not enough faster and the control is not easy to do.

11
Cable system - Bi cables in parallel System very fast and easy to control. Ceilbot Cables Actuators

12
Ceilbot task and characteristics Play real time record (follow the target like a ball) ▫The system must be very fast. User interface / manual mode ▫Someone can use the robot manually to get one video or to prepare an action. Interactive coach: We can use sticker on players and the Ceilbot can analyze the game play and give a real-time position of each player to the coach or give strategies. Camcorder: Vision 360° ▫The camcorder have to record every from anywhere. Arm: height depending of the Sport Hall size. 1° of liberty.

13
Obstacles RequirementsRobot design Basket-ballDetection of sport goods Sensors on the top close to the ceiling Light gridMaybe get the power from here Power socket capable of connection to the light network Ceiling not flat Necessity to add a grid for the robot Grip and holder to maintain the robot on the ceiling Sudden obstacle (volley or basket ball...) ‣ No breaking, robot has to be able to find its way even if it has been move by the collision Powerful and fast mission planner and navigator ‣ Avoiding the sudden obstacle as much as possible Reflexive architecture needed to be quick enough to avoid the obstacle. Ropes and cablesDetection and avoidanceEfficient vision detection

14
Challenges P RICE Sports hall, are equipped with valuable goods so the price of the Robot doesn’t have to be too low comparing to a robot built for public customers. E ASY INSTALLATION The installation must not conflict with the light system or with the sports goods S HOCK RESISTANT Indeed if balls (e.g. basketball, handball, football) appear and bump into it. E ASY TO ACCESS The system must be easy to access for maintenance or to remove something on the rail.
 appear and bump into it. E ASY TO ACCESS The system must be easy to access for maintenance or to remove something on the rail..")
15
Structure Fonction User interface Modelisation

16
Structure Type Number of items Description Metal shaped beam2 Used as rails to make the robot move on the length of the hall. But also as a support to maintain the robot in the air Electric motor (step motor or DC motor) + wheel 2 Those motors coupled with wheels permits the motion of the robot along the beam rails. Metal cable with stretching system 2 Those cable are used as rails by the base of the robot. They permits it to move on the width of the room Based motor + wheel1 It permits the motion of the base along the cables Fordable and removable arm 1 This arm could be use to play tennis and be remove then when the robot is only filming Camera tracking2Vision recognition Base of the robot1 It makes the connexion between the motion on the different rails and the active part (filming and/or playing) Rack rail4 It permits the entire structure to go up or done in order to make the necessarily maintenance on the robot
 + wheel 2 Those motors coupled with wheels permits the motion of the robot along the beam rails. Metal cable with stretching system 2 Those cable are used as rails by the base of the robot. They permits it to move on the width of the room Based motor + wheel1 It permits the motion of the base along the cables Fordable and removable arm 1 This arm could be use to play tennis and be remove then when the robot is only filming Camera tracking2Vision recognition Base of the robot1 It makes the connexion between the motion on the different rails and the active part (filming and/or playing) Rack rail4 It permits the entire structure to go up or done in order to make the necessarily maintenance on the robot.")
17
Functions Play real time record (follow the target like a ball) The system must be very fast. Link: http://www.skycam.tv/folders.asp?action=display&record=3http://www.skycam.tv/folders.asp?action=display&record=3 Interactive coach: We can use sticker on players and the Ceilbot can analyze the game play and give a real-time position of each player to the coach or give strategies. Robot player: the robot can be your opponent. It can play tennis with you by using a tennis racket and it can follow the ball with the video camera. Link: http://www.youtube.com/watch?v=TXJYz5G- AlQ&feature=player_embeddedhttp://www.youtube.com/watch?v=TXJYz5G- AlQ&feature=player_embedded

18
User interface The user interface could be some remote device equipped with a multi-touch screen. When the robot is used as an opponent is would be a good idea to have several different mode of difficulty (beginner, medium, master). Think about an easy system to fold and remove, or add the arm to the main body (system has to be save for users). The main advantage of this solution compare to a usual joystick is that it is portable and maybe easier to control.
. Think about an easy system to fold and remove, or add the arm to the main body (system has to be save for users). The main advantage of this solution compare to a usual joystick is that it is portable and maybe easier to control..")
19
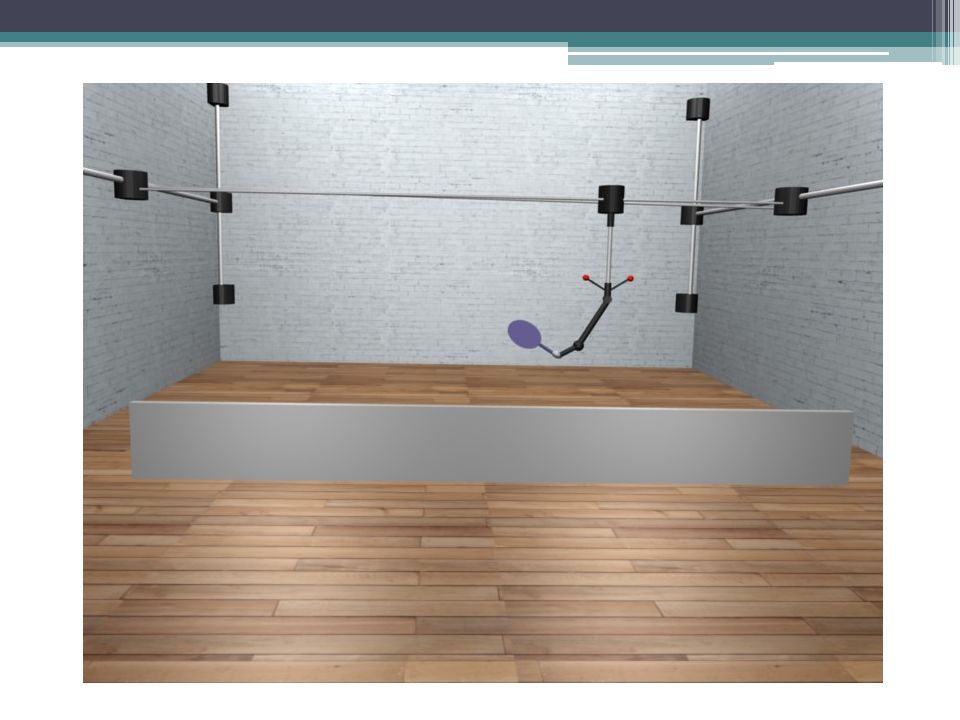
Model Camera Cable Arm

21
M ODELISATION ADAMS

23
Conclusion The Ceilbot robot project is very interesting because it demands lots of imagination ingenuity. Besides we think that a robot which moves under the ceiling could be a enormous market, and we are not the only one. For the moment our robot is still a concept, but we are working on the simulation and what could be the real structures using standard components.

24
Thank You

Similar presentations