Download presentation
Presentation is loading. Please wait.

1
Lecture 7 Intersection of Hyperplanes and Matrix Inverse Shang-Hua Teng

2
Elimination Methods for 2 by 2 Linear Systems 2 by 2 linear system can be solved by eliminating the first variable from the second equation by subtracting a proper multiple of the first equation and then by backward substitution Sometime, we need to switch the order of the first and the second equation Sometime we may not be able to complete the elimination

3
Singular Systems versus Non-Singular Systems A singular system has no solution or infinitely many solution –Row Picture: two line are parallel or the same –Column Picture: Two column vectors are co- linear A non-singular system has a unique solution –Row Picture: two non-parallel lines –Column Picture: two non-colinear column vectors

4
Gaussian Elimination in 3D Using the first pivot to eliminate x from the next two equations

5
Gaussian Elimination in 3D Using the second pivot to eliminate y from the third equation

6
Gaussian Elimination in 3D Using the second pivot to eliminate y from the third equation

7
Now We Have a Triangular System From the last equation, we have

8
Backward Substitution And substitute z to the first two equations

9
Backward Substitution We can solve y

10
Backward Substitution Substitute to the first equation

11
Backward Substitution We can solve the first equation

12
Backward Substitution We can solve the first equation

13
Generalization How to generalize to higher dimensions? What is the complexity of the algorithm? Answer: Express Elimination with Matrices

14
Step 1 Build Augmented Matrix Ax = b [A b]
![Step 1 Build Augmented Matrix Ax = b [A b]](http://images.slideplayer.com/15/4598602/slides/slide_14.jpg "Step 1 Build Augmented Matrix Ax = b [A b]")
15
Pivot 1: The elimination of column 1

16
Pivot 2: The elimination of column 2 Upper triangular matrix

17
Backward Substitution 1: from the last column to the first Upper triangular matrix

18
Expressing Elimination by Matrix Multiplication

19
Elementary or Elimination Matrix The elementary or elimination matrix That subtracts a multiple l of row j from row i can be obtained from the identity matrix I by adding (-l) in the i,j position
 in the i,j position")
20
Elementary or Elimination Matrix

21
Pivot 1: The elimination of column 1 Elimination matrix

22
The Product of Elimination Matrices

23
Elimination by Matrix Multiplication

24
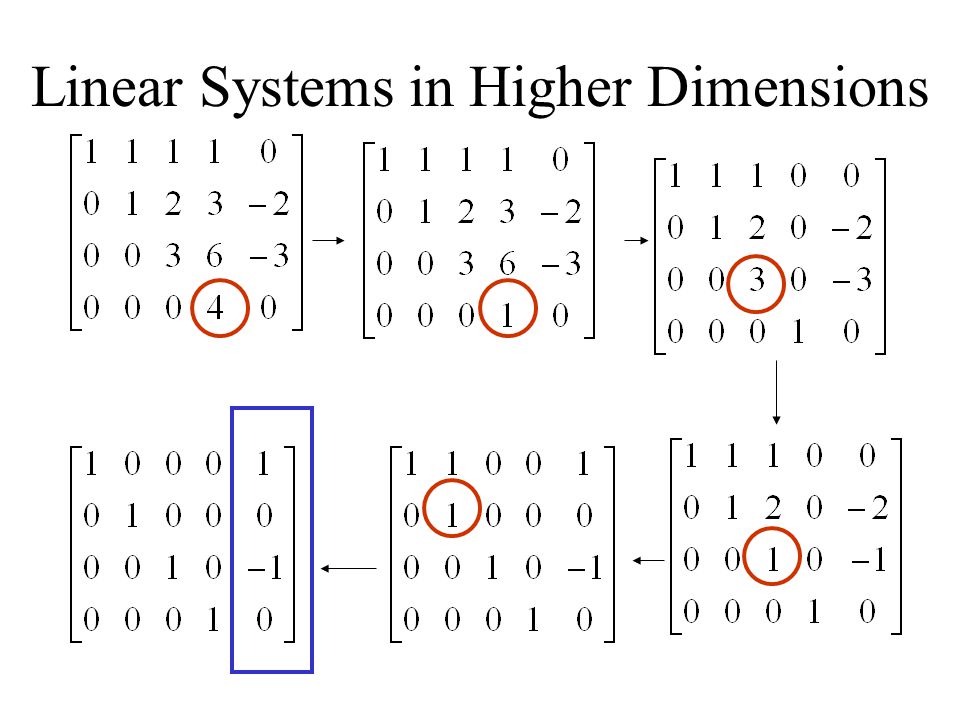
Linear Systems in Higher Dimensions

27
Booking with Elimination Matrices

28
Multiplying Elimination Matrices

29
Inverse Matrices In 1 dimension

30
Inverse Matrices In high dimensions

31
Inverse Matrices In 1 dimension In higher dimensions

32
Some Special Matrices and Their Inverses

33
Inverses in Two Dimensions Proof:

34
Uniqueness of Inverse Matrices

35
Inverse and Linear System

36
Therefore, the inverse of A exists if and only if elimination produces n non-zero pivots (row exchanges allowed)
")
37
Inverse, Singular Matrix and Degeneracy Suppose there is a nonzero vector x such that Ax = 0 [column vectors of A co-linear] then A cannot have an inverse Contradiction: So if A is invertible, then Ax =0 can only have the zero solution x=0
![Inverse, Singular Matrix and Degeneracy Suppose there is a nonzero vector x such that Ax = 0 [column vectors of A co-linear] then A cannot have an inverse Contradiction: So if A is invertible, then Ax =0 can only have the zero solution x=0](http://images.slideplayer.com/15/4598602/slides/slide_37.jpg "Inverse, Singular Matrix and Degeneracy Suppose there is a nonzero vector x such that Ax = 0 [column vectors of A co-linear] then A cannot have an inverse Contradiction: So if A is invertible, then Ax =0 can only have the zero solution x=0")
38
One More Property Proof So

39
Gauss-Jordan Elimination for Computing A -1 1D 2D

40
Gauss-Jordan Elimination for Computing A -1 3D

41
Gauss-Jordan Elimination for Computing A -1 3D: Solving three linear equations defined by A simultaneously n dimensions: Solving n linear equations defined by A simultaneously

42
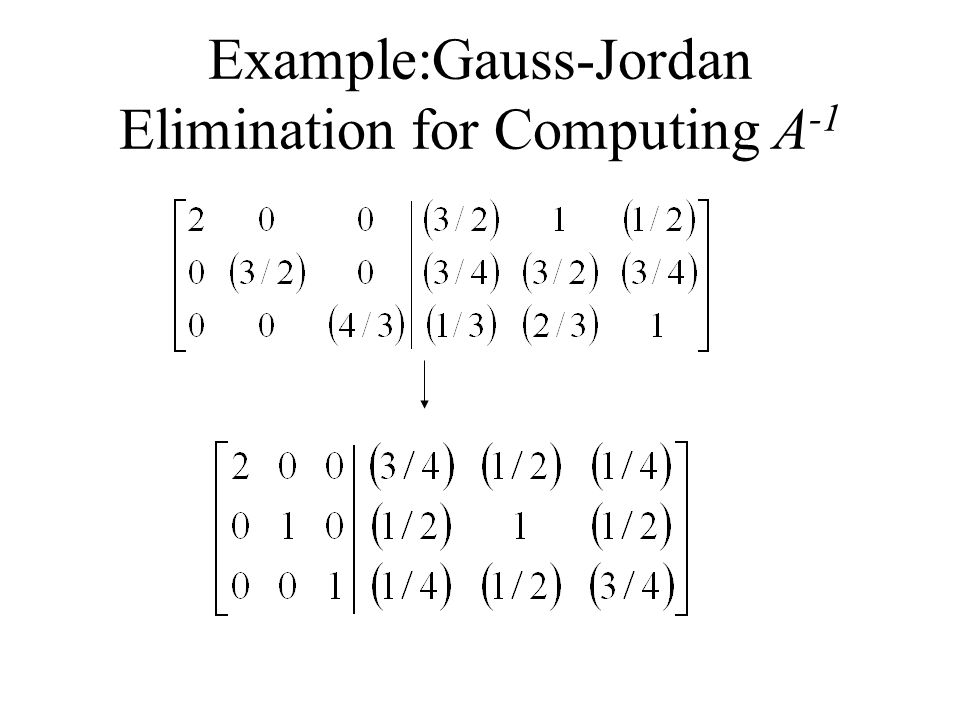
Example:Gauss-Jordan Elimination for Computing A -1 Make a Big Augmented Matrix

43
Example:Gauss-Jordan Elimination for Computing A -1

Similar presentations