Download presentation
Presentation is loading. Please wait.

1
OCEN 201 Introduction to Ocean & Coastal Engineering
Basics of Naval Architecture Jun Zhang

2
Ships by Configurations
Surface displacement: Conventional ships (single hull); Catamaran (double hull, large deck area, small displacement, excellent stability). Near (above) Surface: Air cushion vehicles; Hydrofoils and planning hull craft (small displacement, high speed) Submerged: Submersibles; submarines; Underwater habitats; Submerged buoys. Semi submersibles: Very deep, small water plane Bottom supported: Temporary & Permanent jack-up;
; Catamaran (double hull, large deck area, small displacement, excellent stability). Near (above) Surface: Air cushion vehicles; Hydrofoils and planning hull craft (small displacement, high speed) Submerged: Submersibles; submarines; Underwater habitats; Submerged buoys. Semi submersibles: Very deep, small water plane. Bottom supported: Temporary & Permanent jack-up;")
3
Tanker (with a bulbous bow)
")
4
Small Water-plane Area Twin-Hull (SWATH)
")
5
Ferry (Catamaran, or SWATH)
")
6
Container Ship

7
Container Ship

11
Cruise ship with a bulbous bow

14
Trimaran

15
Tri-maran Sailboat

16
View from the below

17
Hydrofoil Craft

18
Hover Craft or Air Cushion Craft

19
Rules and Regulations The rules and regulations are issued by organizations which may be divided into three categories: -Classification societies: have established standards of construction by the production of rules which have done much to ensure the safety of ships. (ABS, DNV, BV) -Governmental Authorities: concern for the safety of ships and the well being of all who sail the ships (behavior of the people). (Coast Guard) -International Authorities, IMO (International Maritime Organization)
 -Governmental Authorities: concern for the safety of ships and the well being of all who sail the ships (behavior of the people). (Coast Guard) -International Authorities, IMO (International Maritime Organization)")
20
Basic Topics of Naval Architecture
Hull: Hydrostatic, hydrodynamic performance (Resistance)* Structure: Strength of hull** Machinery and Propulsion: Main engine** & propellers* Ship Control: (maneuvering, sea keeping)**
* Structure: Strength of hull** Machinery and Propulsion: Main engine** & propellers* Ship Control: (maneuvering, sea keeping)**")
21
Deck Machinery** Navigation: Sensors & Radar** Communications** Damage Control:** Rigging and Mooring:* Economic feasibility:** ** Not covered in detail

22
Definition (Terminology):
Principal Dimensions (length, breadth, depth etc) -Length. Lbp ( or Lpp) Length between two perpendiculars FP – Forward perpendicular (vertical line through intersection of stem and waterline (w.l).) AP – Backward perpendicular (vertical line through the center of rudder pintle) Loa – Overall Length Lwl – Waterline Length (calculation length) also see Table 6-2 at p175 (old edition at p142)
 -Length. Lbp ( or Lpp) Length between two perpendiculars. FP – Forward perpendicular (vertical line through intersection of stem and waterline (w.l).) AP – Backward perpendicular (vertical line through the center of rudder pintle) Loa – Overall Length. Lwl – Waterline Length (calculation length) also see Table 6-2 at p175 (old edition at p142)")
23
Sheer is the height measured between deck at side and base line.
W.L. A.P Loa Lwl Amid Ship Lbp Sheer is the height measured between deck at side and base line. Forward Sheer F.P. After Sheer

24
Definition (Terminology):
Principal Dimensions -Breadth, depth & draft. Breadth (moulded) (inside of plate on one side to another side) Breadth maximum Depth (measured at midship) Camber – the rise of the deck at the centerline. 2% of breadth Bilge radius Rise of Floor Flat of keel (thicker plate) Tumber home Rake of stem Draught and trim
 (inside of plate on one side to another side) Breadth maximum. Depth (measured at midship) Camber – the rise of the deck at the centerline. 2% of breadth. Bilge radius. Rise of Floor. Flat of keel (thicker plate) Tumber home. Rake of stem. Draught and trim.")
25
Mid Cross Section of a ship
Flat of Keel Rise of Floor Depth Moulded Breadth moulded Bilge radius Centerline Deck Base Line (Top of Flate keel) Camber Breadth Extreme Fonder w.l. Draft (d) Mid Cross Section of a ship
 Camber. Breadth Extreme. Fonder. w.l. Draft (d) Mid Cross Section of a ship.")
26
If W.L. is parallel to the baseline (keel line), the ship is floating evenly.
If not parallel, the ship has a trim. Trim = da – df Trim (in radians) = (da – df )/ L Average draft = (da + df )/ 2 Free board (f.b) is the distance measured downwards from the deck to the W.L. Usually f.b. is minimum at midship Minimum f.b is required by International Law.
 = (da – df )/ L. Average draft = (da + df )/ 2. Free board (f.b) is the distance measured downwards from the deck to the W.L. Usually f.b. is minimum at midship. Minimum f.b is required by International Law.")
27
Line Drawing: Using the methods of descriptive geometry, the form of a hull is drawn on a scale (1:50 or 1:200) drawing, which is called “Lines Drawing,” or simply the “lines” or “lines plan”. (See p34 Figure 3.4 Lines plan). Lines drawing mainly consists of three plan views Sheer plane (Buttock plane, Buttock lines) : parallel to the longitudinal central plane (2m, 4m, etc are the distances from the center plane)
 drawing, which is called Lines Drawing, or simply the lines or lines plan . (See p34 Figure 3.4 Lines plan). Lines drawing mainly consists of three plan views. Sheer plane (Buttock plane, Buttock lines) : parallel to the longitudinal central plane (2m, 4m, etc are the distances from the center plane)")
28
Body Plan (Ordinate station, Transverse section,
Half-Breadth plane (Water plane, Waterline planes): parallel to the base plane (2m, 4m, ….are the distance form the base plane) Body Plan (Ordinate station, Transverse section, 0-10 bow stern (US), (UK)): parallel to the mid-section (# of stations indicated the distance from the mid-section or bow). Diagonals (Bilge Diagonal) Fair form and fairness of line, checking the consistency of point, smoothness of lines Table of Offsets
: parallel to the base plane (2m, 4m, ….are the distance form the base plane) Body Plan (Ordinate station, Transverse section, 0-10 bow stern (US), 10-0 (UK)): parallel to the mid-section (# of stations indicated the distance from the mid-section or bow). Diagonals (Bilge Diagonal) Fair form and fairness of line, checking the consistency of point, smoothness of lines. Table of Offsets.")
29
Line Drawing

30
Hull characteristics (coeff.)
Displacement and Weight Relationship B (buoyancy) = W (weight). (conventional ship) – displacement volume B = Δ = γ Appendage volume ≈ 1%
 = W (weight). (conventional ship) – displacement volume B = Δ = γ. Appendage volume ≈ 1%")
31
Hull characteristics (coefficients (non-dimensional)
- Coefficient of Form ( Fatness of a hull) Block Coefficient CB where L= Lpp or Lbp and T = Draft CB ~0.90 even bigger - Midship Section Coefficient CM = immersed area of mishap section (A) / (BT) 0.67~0.98
 Block Coefficient CB. where L= Lpp or Lbp and T = Draft. CB 0.38~0.90 even bigger. - Midship Section Coefficient. CM = immersed area of mishap section (A) / (BT) 0.67~0.98.")
32
-Prismatic or Longitudinal Coefficient: 0.55~0.80
-Waterplane Coefficient -Displacement /Length Ratio

33
-Breadth /Length Ratio :
-Draft/Length Ratio -Draft/Breadth Ratio -These coefficients are related to the resistance and stability of the ship and can be used to estimate them empirically.

34
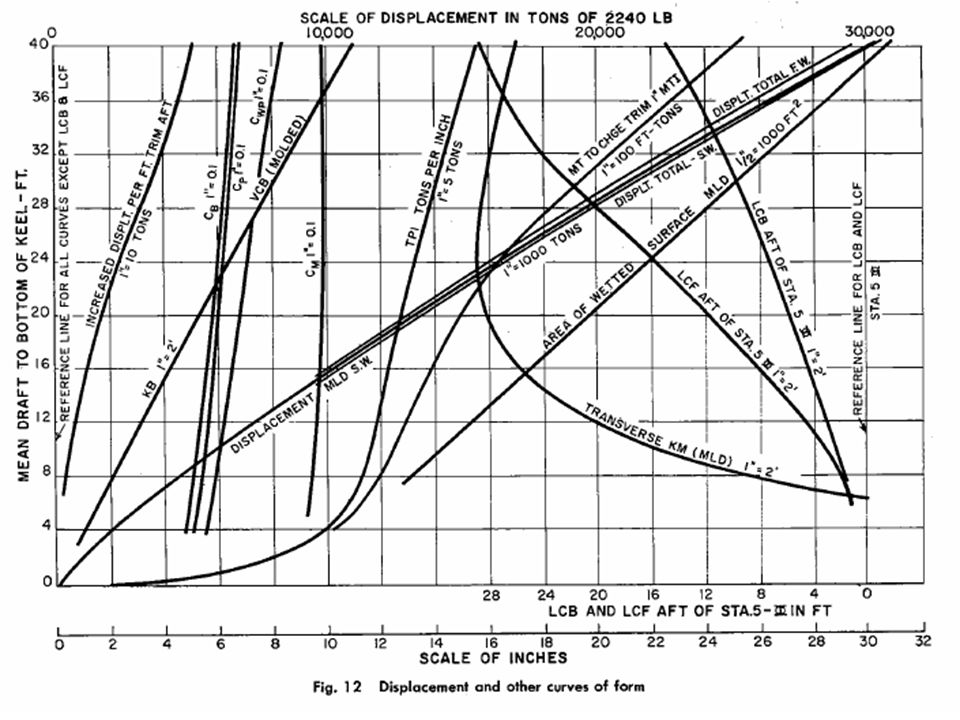
Important Hydro-Static Curves or Relations
(see Fig. 6-3, pp148) Displacement Curves (displacement [molded, total] vs. draft, weight [SW, FW] vs. draft (T)) Coefficients Curves (CB , CM , CP , CWL, vs. T) VCB (KB, ZB): Vertical distance of Center of Buoyancy (C.B) to the baseline vs. T LCB (LCF, XB): Longitudinal Distance of C.B or floatation center (C.F) to the midship vs. T
 Displacement Curves (displacement [molded, total] vs. draft, weight [SW, FW] vs. draft (T)) Coefficients Curves (CB , CM , CP , CWL, vs. T) VCB (KB, ZB): Vertical distance of Center of Buoyancy (C.B) to the baseline vs. T. LCB (LCF, XB): Longitudinal Distance of C.B or floatation center (C.F) to the midship vs. T.")
36
Stability A floating body reaches to an equilibrium state, if
1) its weight = the buoyancy 2) the line of action of these two forces become collinear. The equilibrium: stable, or unstable or neutrally stable. Stable equilibrium: if it is slightly displaced from its equilibrium position and will return to that position. Unstable equilibrium: if it is slightly displaced form its equilibrium position and tends to move farther away from this position. Neutral equilibrium: if it is displaced slightly from this position and will remain in the new position.
 its weight = the buoyancy. 2) the line of action of these two forces become collinear. The equilibrium: stable, or unstable or neutrally stable. Stable equilibrium: if it is slightly displaced from its equilibrium position and will return to that position. Unstable equilibrium: if it is slightly displaced form its equilibrium position and tends to move farther away from this position. Neutral equilibrium: if it is displaced slightly from this position and will remain in the new position.")
37
Motion of a Ship: 6 degrees of freedom - Surge - Sway - Heave - Roll
- Pitch - Yaw Axis Translation Rotation x Longitudinal Surge Neutral S. Roll S. NS. US y Transverse Sway Neutral S. Pitch S. z Vertical Heave S. (for sub, N.S.) Yaw NS
 Yaw NS.")
38
Righting & Heeling Moments
A ship or a submarine is designed to float in the upright position. Righting Moment: exists at any angle of inclination where the forces of weight and buoyancy act to move the ship toward the upright position. Heeling Moment: exists at any angle of inclination where the forces of weight and buoyancy act to move the ship away from the upright position.

39
For a displacement ship,
W.L G---Center of Gravity, B---Center of Buoyancy M--- Transverse Metacenter, If M is above G, we will have a righting moment, and if M is below G, then we have a heeling moment.

40
For submarines (immersed in water)
G G If B is above G, we have righting moment If B is below G, we have heeling moment

41
Upsetting Forces (overturning moments)
Beam wind, wave & current pressure Lifting a weight (when the ship is loading or unloading in the harbor.) Offside weight (C.G is no longer at the center line) The loss of part of buoyancy due to damage (partially flooded, C.B. is no longer at the center line) Turning Grounding
 Offside weight (C.G is no longer at the center line) The loss of part of buoyancy due to damage (partially flooded, C.B. is no longer at the center line) Turning. Grounding.")
42
Static Stability & Dynamical Stability
Static Stability: Studying the magnitude of the righting moment given the inclination (angle) of the ship*. (That is, the rolling velocity and energy are not considered.) Dynamic Stability**: Calculating the amount of work done by the righting moment given the inclination of the ship.
 of the ship*. (That is, the rolling velocity and energy are not considered.) Dynamic Stability**: Calculating the amount of work done by the righting moment given the inclination of the ship.")
43
Static Stability the stability at large inclinations.
The initial stability (aka stability at small inclination) &, the stability at large inclinations. The initial stability: studies the right moments or right arm at small inclination angles (< 5 degree). The stability at large inclination (angle): computes the right moments (or right arms) as function of the inclination angle, up to a limit angle at which the ship may lose its stability (capsizes). (Cross curves of stability (see Fig at pp 187 (old version pp 156) & Curves of Static Stability (see Fig. 6-8 at pp 187 (old version pp157) ) The initial stability is a special case of the latter.
 &, the stability at large inclinations. The initial stability: studies the right moments or right arm at small inclination angles (< 5 degree). The stability at large inclination (angle): computes the right moments (or right arms) as function of the inclination angle, up to a limit angle at which the ship may lose its stability (capsizes). (Cross curves of stability (see Fig. 6-7 at pp 187 (old version pp 156) & Curves of Static Stability (see Fig. 6-8 at pp 187 (old version pp157) ) The initial stability is a special case of the latter.")
44
Initial stability Righting Arm: A symmetric ship is inclined at a small angle dΦ. C.B has moved off the ship’s centerline as the result of the inclination. The distance between the action of buoyancy and weight, GZ, is called righting arm. Transverse Metacenter: A vertical line through the C.B intersects the original vertical centerline at point, M.

45
Location of the Transverse Metacenter
Transverse metacentric height : the vertical distance between the C.G. and M (GM). It is important as an index of transverse stability at small angles of inclination. GZ is positive, if the moment is righting moment. M should be above C.G, GZ >0. If we know the location of M, we may find GM, and thus the righting arm GZ or righting moment can be determined given a small angle dΦ. Righting Moment =
. It is important as an index of transverse stability at small angles of inclination. GZ is positive, if the moment is righting moment. M should be above C.G, GZ >0. If we know the location of M, we may find GM, and thus the righting arm GZ or righting moment can be determined given a small angle dΦ. Righting Moment =")
47
Examples of computing KM d B B d

48
Ship Resistance (Drag )
A ship actually moves at the same time through two fluids, water and air, with widely different density. While the lower part of the hull is moving through water, the upper part is moving through air. Because , the air resistance is usually much smaller than the water resistance, except for those aerostatic support of hydrodynamic support crafts. Summary: Water resistance (submerged part of a hull) Air resistance (upper part of hull & superstructure)
 Air resistance (upper part of hull & superstructure)")
49
Types of Water Resistances
Wave-Making Resistance: Waves are generated on the surface of water and spread away from a ship. Waves possess energy. Thus a ship making waves means a loss of its energy. Wave-making resistance is important to surface ships, especially those of high speeds. Frictional Resistance: arising due to the viscosity of water, i.e. tangential stresses. Because of viscosity & velocity gradient in the direction normal to the ship hull, there is a mass of fluid being dragged along with a ship. Energy necessary to drag the mass of fluid is the work done by the ship against the frictional resistance.

50
Air resistance (mainly resulting from wind resistance).
3. Eddy-making Resistance: Due to the viscosity of the fluid, the flow separates from the surface of a hull and eddies (vortices) are formed. These eddies induce the changes in the velocity field and thus change the normal pressures on a hull. The changes in the pressure field around a ship result in the eddy-making resistance. Air resistance (mainly resulting from wind resistance). Appendage resistances: are caused by the appendages of a ship, such as propellers, rudders and bilge keels.
 are formed. These eddies induce the changes in the velocity field and thus change the normal pressures on a hull. The changes in the pressure field around a ship result in the eddy-making resistance. Air resistance (mainly resulting from wind resistance). Appendage resistances: are caused by the appendages of a ship, such as propellers, rudders and bilge keels.")
51
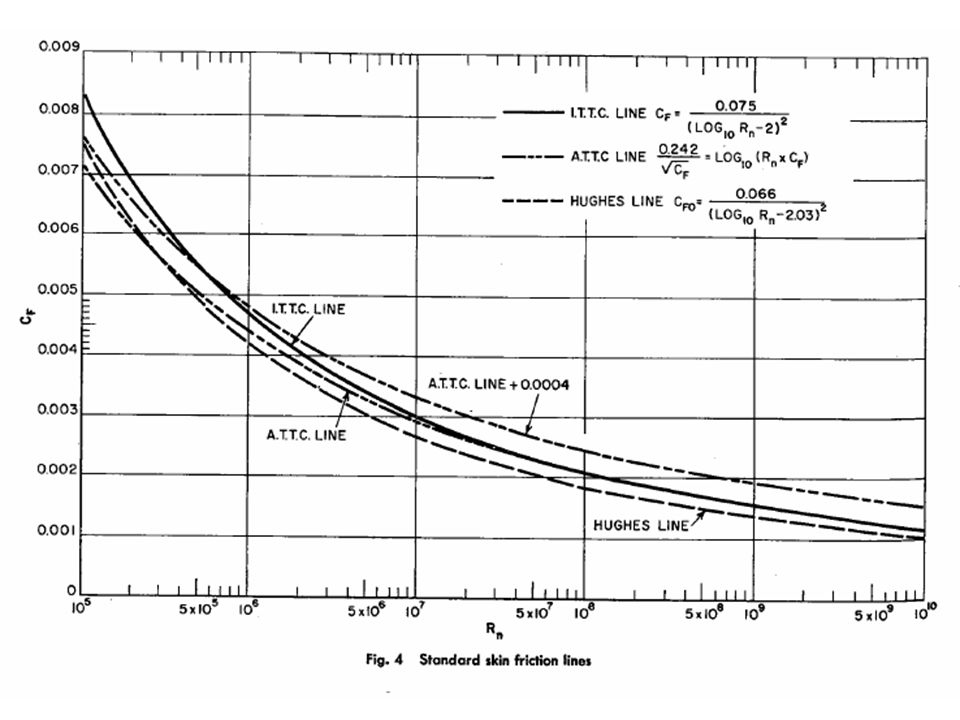
Computation of Frictional Resistance

53
Influence of Roughness of a plate on CF
The formulas for computing CF are applied to the flat plates with smooth surface. The rough surface (of a ship) will result in the increase of CF . Roughness (on the surface of a hull) may be classified into 3 types. Structural roughness: caused by welded joints, warviness of shell plating on the hull. A newly-built ship will have (for Schoenherr formula). 2. Corrosion 3. Fouling: caused by the attachment of marine organisms such as seaweeds, shells and barnacles. Corrosion & fouling occur for ships having sailed for a certain period of time. They will decrease the velocity of the ship. Ship owner will decide when the ship should go to the dock for cleaning.
 will result in the. increase of CF . Roughness (on the surface of a hull) may be. classified into 3 types. Structural roughness: caused by welded joints, warviness of shell plating on the hull. A newly-built ship will have. (for Schoenherr formula). 2. Corrosion. 3. Fouling: caused by the attachment of marine organisms such as seaweeds, shells and barnacles. Corrosion & fouling occur for ships having sailed for a certain. period of time. They will decrease the velocity of the ship. Ship. owner will decide when the ship should go to the dock for cleaning.")
54
Wave-Making Resistance
Wave-making resistance is important to a surface ship (negligible for submarine); & its speed is high. Accurately speaking, its Froude # , or in U.S. the speed/length ratio, is high. It is noticed that the speed to length ratio is a dimensional coefficient, where V is in knots, L in feet. A nautical mile/hr (knot) = m/s.
; & its speed is high. Accurately speaking, its Froude # , or in U.S. the speed/length ratio, is high. It is noticed that the speed to length ratio is a dimensional. coefficient, where V is in knots, L in feet. A nautical mile/hr (knot) = m/s.")
55
Ship Wave Pattern Lord Kelvin (1887) considered a single pressure point traveling in a straight line over the surface of the water, sending out waves which combine to form a characteristic pattern. Transverse Waves Divergence Waves
 considered a single pressure point traveling in a straight line over the surface of the water, sending out waves which combine to form a characteristic pattern. Transverse Waves. Divergence Waves.")
56
Ship Wave Pattern Kelvin wave pattern illustrates and explains many of the features of ship waves. Ship wave pattern is similar to the combination of two Kelvin wave systems generated by two pressure points, with one near the bow and the other near the stern.

57
Wave pattern of a ship

58
Wave pattern behind a moving duck

59
Wave Pattern of a small boat (divergence wave pattern)
")
60
Wave Pattern of a small boat (divergence wave pattern)
")
61
A Towing Carriage and A Ship Model

62
A Towing Carriage

63
Overview of MarinTek’s Shop Model Tank (Norway)
")
64
Propulsive Devices Paddle-Wheels: While the draft varying with ship displacement, the immersion of wheels also varies. The wheels may come out of water when the ship is rolling, causing erratic course-keeping, & they are likely to damage from rough seas. Propellers: Its first use was in a steam-driven boat at N.Y. in 1804. Advantages over paddle-wheels are, 1) not substantially affected by normal changes in draft; 2) not easily damaged; 3) decreasing the width of the ship, & 4) good efficiency driven by lighter engine. Since then, propellers have dominated in use of marine propulsion.
 not substantially affected by normal changes in draft; 2) not easily damaged; 3) decreasing the width of the ship, & 4) good efficiency driven by lighter engine. Since then, propellers have dominated in use of marine propulsion.")
65
Paddle Wheels Propulsion (Stern)
")
66
Paddle Wheels Propulsion (Midship)
")
67
Propeller (5-blade)
")
68
Propeller (5-blade) & Rudder
 & Rudder")
69
Jet type: Water is drawn by a pump & delivered sternwards as a
jet at a high velocity. The reaction providing the thrust. It’s use has been restricted to special types of ships. Other propulsion Devices: Nozzles (Duct) Propellers: main purpose is to increase the thrust at low ship speed (tug, large oil tanker) Vertical-Axis Propellers: Advantage is to control the direction of thrust. Therefore, the ship has good maneuverability. Controllable-Pitch Propellers (CCP): The pitch of screw can be changed so that it will satisfy all working conditions. Tandem and Contra-rotating Propellers: It is used because the diameter of a propeller is restricted due to limit of the draft or other reasons (torpedo). The efficiency of the propeller usually decreases.
 Propellers: main purpose is to increase the thrust at low ship speed (tug, large oil tanker) Vertical-Axis Propellers: Advantage is to control the direction of thrust. Therefore, the ship has good maneuverability. Controllable-Pitch Propellers (CCP): The pitch of screw can be changed so that it will satisfy all working conditions. Tandem and Contra-rotating Propellers: It is used because the diameter of a propeller is restricted due to limit of the draft or other reasons (torpedo). The efficiency of the propeller usually decreases.")
70
Jet Propulsion

71
Nozzle Propellers

72
Vertical-Axis Propellers

73
Vertical-Axis Propellers

74
Controllable Pitch Propellers (CPP)
")
75
Contra-rotating Propellers

76
Type of Ship Machinery (Engine)
Steam Engine Steam Turbine Internal combustion engines (Diesel engine) Gas Turbines Nuclear reactors – turbine
 Gas Turbines. Nuclear reactors – turbine.")
77
Engine (Brake) Power: Measured at right behind the engine PB
Delivered horsepower (PD): the power delivered to the propeller. Thrust horsepower (PT):
: the power delivered to the propeller. Thrust horsepower (PT):")
78
Effective horsepower (PE , or EHP):
RT – total resistance Vs – advance velocity of ship

79
Propulsion Efficiency
Total propulsion efficiency

Similar presentations






 Floatation & Stability>")





INE: Ch 22 (389-400) INE: Ch 23 (401-402, 409)INE: Ch 23 (401-402, 409) PNE: Ch 3 (1-10)PNE: Ch.>")



>")


 UNDER THE GUIDANCE OF : MR.K.V. RAJESH (PHYSICS)>")



