Download presentation
Presentation is loading. Please wait.

1
Detecting Abandoned Objects With a Moving Camera 指導教授:張元翔 老師 學生:資訊碩一 9977003 吳思穎

2
Outline Introduction........................................3 Related work......................................4 Proposed approach.............................6 a. Intersequence Geometric Alignment........ 8 b. Intrasequence Geometric Alignment.......10 c. Temporal Filtering............................13 Experimental results......................... 14 Conclusion........................................17

3
Introduction Dynamic suspicious behaviors Static dangerous objects

4
Related work Spengler and Schiele : a tracking/surveillance system to automatically detect abandoned objects and draw the operator’s attention to such events Porikli et al. : use two foreground and two background models for abandoned object detection Guler and Farrow : use a background-subtraction based tracker and mark the projection of the center of mass of each object on the ground Smith et al. : use a two-tiered approach

5
Related work All of the previously mentioned techniques utilize the static cameras installed in some public places, where the background is stationary. However, for some application scenarios, the space to keep a watch on is too large to use static cameras. Therefore, it is necessary to use a moving camera to scan these places.

6
Proposed approach Intersequence Geometric Alignment Intrasequence Geometric Alignment Temporal Filtering

8
Intersequence Geometric Alignment SIFT feature descriptor (128-dimensional) RANSAC v.s mRANSAC
 RANSAC v.s mRANSAC")
9
Fig. 3. Examples of alignment based upon RANSAC and modified RANSAC (mRANSAC). First column: the reference and target frames. Second column: best inliers obtained from RANSAC and mRANSAC respectively. Third column: the aligned reference frames based upon RANSAC and mRANSAC. Fourth column: difference images between the aligned reference frames.

10
Intrasequence Geometric Alignment Removal of False Alarms on High Objects Removal of False Alarms on the Dominant Plane

11
R Fig. 6. Illustration of intrasequence alignment for R and removing false alarms on high objects based upon the alignment results. See text in Section III-B-I for details

12
TR Fig. 8. Illustration of intrasequence alignment for both T and R, and removing false alarms in flat areas by local appearance comparison of the alignment results.

13
Temporal Filtering Goal : To confirm the existence of suspicious objects.

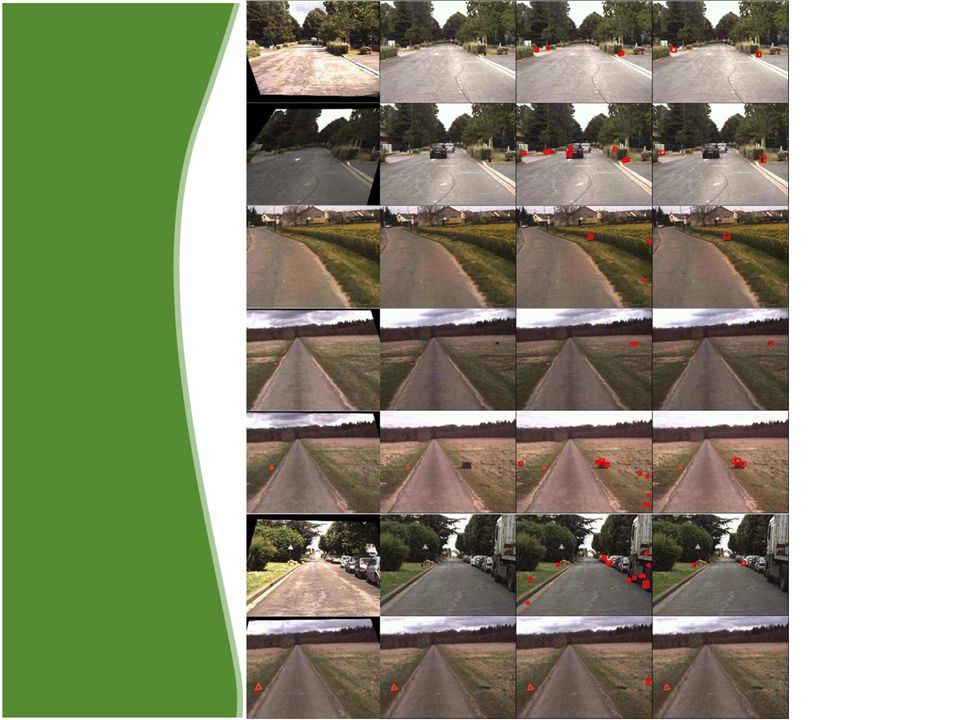
14
Experimental results The length of the 15 test videos ranges from 70 to 230 frames. The height of our test objects ranges from about 4–80 cm. There are about 23 suspicious objects overall and we successfully detect 21 of them. Detection fails in only one video where the test object is almost flat.

16
Conclusion Our algorithm finds these objects in the target video by matching it with a reference video that does not contain them.

17
Thank you everybody~

Similar presentations


 Reporter :鄒嘉恆 Date : 10/06/2009.>")

















