Download presentation
Presentation is loading. Please wait.

1
2011.06.01 Beyond Trilateration: On the Localizability of Wireless Ad Hoc Networks Reported by: 莫斌

2
Authors Zheng Yang Hong Kong University of Science and Technology Yuhao Liu Hong Kong University of Science and Technology Xiang-Yang Li Illinois Institute of Technology

3
Outline INTRODUCTION NEIGHBORHOOD LOCALIZABILITY NETWORK-WIDE LOCALIZABILITY PERFORMANCE EVALUATION CONCLUSION

4
Supplementary Material What is Trilateration? Trilateration is proposed for testing localizability based on the fact that the location of an object can be determined if the distances to three references are known.

5
Supplementary Material What is Rigidity? Rigidity is the property of a structure that it does not bend or flex under an applied force. The opposite of rigidity is flexibility.

6
Supplementary Material What is Connectivity of graph theory? A cut, vertex cut, or separating set of a connected graph G is a set of vertices whose removal renders G disconnected. The connectivity is the size of a smallest vertex cut. This means a graph G is said to be k-connected if there does not exist a set of k-1 vertices whose removal disconnects the graph.

7
INTRODUCTION The proliferation of wireless and mobile devices has fostered the demand of context-aware applications. Location is one of the most essential contexts.

8
INTRODUCTION Beacons know their global locations and the rest determine their locations by measuring the Euclidean distances to their neighbors.

9
INTRODUCTION A wireless ad hoc network can be modeled by a distance graph G=(V, E, d). A graph with possible additional constraint is called localizable if there is a unique location of every node.

10
INTRODUCTION A graph is called rigid if one cannot continuously deform the graph embedding in the plane while preserving the distance constraints. A graph is redundantly rigid if the removal of any edge results in a graph that is still rigid.

11
INTRODUCTION A graph is globally rigid if there is a unique realization in the plane. Jackson et al. prove that a graph is globally rigid if and only if it is 3-connected and redundantly rigid.

12
INTRODUCTION Global information is needed to test connectivity.

13
INTRODUCTION Trilatertion-based approaches. Border nodes are often more critical in many applications.

14
INTRODUCTION A algorithm to find localizable nodes by testing whether they are included in some wheel graphs within their neighborhoods. Using only local information, it is able to recognize all one-hop localizable nodes.

15
NEIGHBORHOOD LOCALIZABILITY Lemma 1: The wheel graph W n is globally rigid. Proof: The graph Wn is redundantly rigid and 3-connected. Accordingly, it is globally rigid.

16
Conditions for Node Localizability N[v] is a subgraph of G n containing only v and its one-hop (direct) neighbors and edges between them in G n. N(v) is obtained by removing v and all edges incident to v from N[v]. NEIGHBORHOOD LOCALIZABILITY
![ Conditions for Node Localizability N[v] is a subgraph of G n containing only v and its one-hop (direct) neighbors and edges between them in G n.](http://images.slideplayer.com/14/4396312/slides/slide_16.jpg " N(v) is obtained by removing v and all edges incident to v from N[v]. NEIGHBORHOOD LOCALIZABILITY.")
17
if a vertex in N[v] is included in a wheel graph centered at v, it is localizable by given three beacons. three localizable vertices in N[v]. the hub and two rim vertices; three rim vertices. NEIGHBORHOOD LOCALIZABILITY
![ if a vertex in N[v] is included in a wheel graph centered at v, it is localizable by given three beacons.](http://images.slideplayer.com/14/4396312/slides/slide_17.jpg " three localizable vertices in N[v]. the hub and two rim vertices; three rim vertices. NEIGHBORHOOD LOCALIZABILITY.")
18
Vertex x belongs to a wheel structure in N[v] including two localizable vertices v 1 and v 2. X lies on a cycle containing v 1 and v 2 in N(v). NEIGHBORHOOD LOCALIZABILITY
![ Vertex x belongs to a wheel structure in N[v] including two localizable vertices v 1 and v 2.](http://images.slideplayer.com/14/4396312/slides/slide_18.jpg " X lies on a cycle containing v 1 and v 2 in N(v). NEIGHBORHOOD LOCALIZABILITY.")
19
According to Dirac’s result, if a graph G is 3-connected, for any three vertices in G, G has a cycle including them. If N(v) is 3-connected, all vertices are included in some wheels in N[v]. NEIGHBORHOOD LOCALIZABILITY It’s too critical to be realistic.
 is 3-connected, all vertices are included in some wheels in N[v]. NEIGHBORHOOD LOCALIZABILITY It’s too critical to be realistic..")
20
As we know, a 2-connected component in a graph G is a maximal subgraph of G without any articulation vertex whose removal will disconnect G. For simplicity, we use blocks to denote 2- connected components. NEIGHBORHOOD LOCALIZABILITY

21
Lemma 2: In a graph G with an edge (v 1,v 2 ), a vertex x belongs to the block B including v 1 and v 2 if and only if it is on a cycle containing v 1 and v 2. Sufficiency. B’ Is a block, and there are at least two vertex- disjoint paths between any two vertices. Necessity. contradicting the maximality assumption of blocks.

22
NEIGHBORHOOD LOCALIZABILITY Lemma 3: If a graph G is 2-connected, then G’ is globally rigid, where G’ is obtained by adding a vertex v 0 and edges between v 0 to all vertices in G. We take an arbitrary edge (v 1,v 2 ) in G. every other vertex x in G is on a cycle containing v 1 and v 2 by Lemma 2. Since every wheel in G’ shares three vertices, all vertices are actually in the only one globally rigid component.
 in G. every other vertex x in G is on a cycle containing v 1 and v 2 by Lemma 2. Since every wheel in G’ shares three vertices, all vertices are actually in the only one globally rigid component..")
23
Note that not all blocks in N(v) are localizable. NEIGHBORHOOD LOCALIZABILITY
 are localizable. NEIGHBORHOOD LOCALIZABILITY")
24
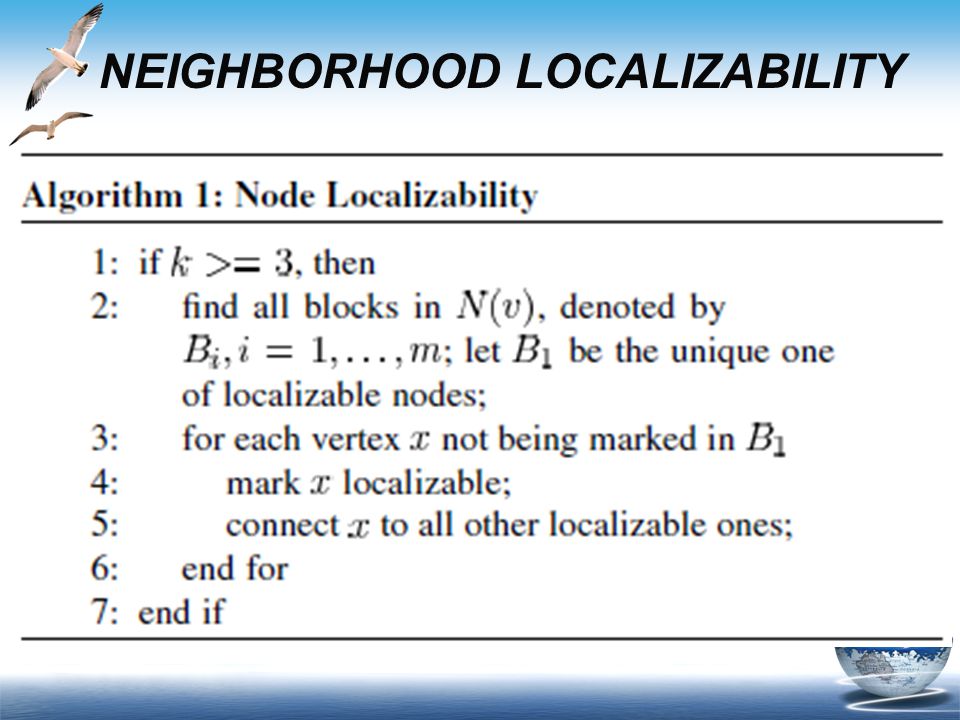
Theorem 1: In a neighborhood graph N[v] with k (k>=3) localizable vertices v i (i=1,…,k and v= v k ), a vertex (other than v i ) belongs to a wheel structure with at least three localizable vertices if and only if it is included in the only (unique) block of N(v) that contains k-1 localizable vertices. Sufficiency: According to Lemma 2. Necessity: According to Lemma 2 and by adding v k back.
![ Theorem 1: In a neighborhood graph N[v] with k (k>=3) localizable vertices v i (i=1,…,k and v= v k ), a vertex (other than v i ) belongs to a wheel structure with at least three localizable vertices if and only if it is included in the only (unique) block of N(v) that contains k-1 localizable vertices.](http://images.slideplayer.com/14/4396312/slides/slide_24.jpg " Sufficiency: According to Lemma 2. Necessity: According to Lemma 2 and by adding v k back..")
25
So far, we achieve a necessary and sufficient condition for finding localizable vertices. Trilateration is actually the minimum wheel graph with four vertices. NEIGHBORHOOD LOCALIZABILITY

27
Is there any localizable vertex that is not included by any wheel in N[v]? Lemma 4: In a graph G, if a vertex is uniquely localizable, it must have three vertex-disjoint paths to three distinct localizable vertices. Theorem 2: (Correctness) In a neighborhood graph N[v], a vertex is marked by Algorithm 1 if and only if it is uniquely localizable in N[v]. NEIGHBORHOOD LOCALIZABILITY
![ Is there any localizable vertex that is not included by any wheel in N[v].](http://images.slideplayer.com/14/4396312/slides/slide_27.jpg " Lemma 4: In a graph G, if a vertex is uniquely localizable, it must have three vertex-disjoint paths to three distinct localizable vertices. Theorem 2: (Correctness) In a neighborhood graph N[v], a vertex is marked by Algorithm 1 if and only if it is uniquely localizable in N[v]. NEIGHBORHOOD LOCALIZABILITY.")
28
Proof for Theorem 2: Sufficiency: Algorithm 1 finds wheel structures with at least three beacons in N[v]. According to Lemma 1. Necessity: According to Lemma 4. NEIGHBORHOOD LOCALIZABILITY
![ Proof for Theorem 2: Sufficiency: Algorithm 1 finds wheel structures with at least three beacons in N[v].](http://images.slideplayer.com/14/4396312/slides/slide_28.jpg "According to Lemma 1. Necessity: According to Lemma 4. NEIGHBORHOOD LOCALIZABILITY.")
29
Definition 1: A graph G is a wheel extension if there are the following: three pairwise-connected vertices, say v 1, v 2 and v 3 ; an ordering of remaining vertices as v 4, v 5, v 6 …, such that any v i is included in a wheel graph (a subgraph of G) containing three early vertices in the sequence. NETWORK-WIDE LOCALIZABILITY Lemma 5: The wheel extension is globally rigid. The proof of Lemma 5 is straightforward.

30
NETWORK-WIDE LOCALIZABILITY

31
Analyze the time complexity of Algorithm 2 running on a graph G with n vertices. O(n 3 ) in dense graphs and O(n) in sparse graphs. In practice, a wireless ad hoc network cannot be excessively dense because the communication links only exist between nearby nodes due to signal attenuation. NETWORK-WIDE LOCALIZABILITY
 in dense graphs and O(n) in sparse graphs. In practice, a wireless ad hoc network cannot be excessively dense because the communication links only exist between nearby nodes due to signal attenuation. NETWORK-WIDE LOCALIZABILITY.")
32
The localizability protocol is implemented on the hardware platform of the OceanSense project. We equip five out of 60 nodes with GPS receivers and adopt the RSS-based ranging technique. We collect a number of instances of the network topology from 8-h observation. Trilateration (TRI) is chosen as a representative of all trilateration-based approaches. PERFORMANCE EVALUATION
 is chosen as a representative of all trilateration-based approaches. PERFORMANCE EVALUATION.")
34
Large-scale simulations are further conducted to examine the effectiveness and scalability of this design. We generate networks of 400 nodes randomly, uniformly deployed in a unit square [0,1] 2. The unit disk model with a radius is adopted for communication and distance ranging. For each evaluation, we integrate results from 100 network instances. PERFORMANCE EVALUATION

37
r=0.15

38
r=0.16

39
CONCLUSION Analyze the limitation of trilateration-based approaches. Propose a novel approach, called WHEEL, based on globally rigid wheel graphs. To validate this approach, a prototype system with tens of wireless sensors is deployed. Large-scale simulations are further conducted to evaluate the scalability and efficiency.

41
Definition 2: In a network, a node is k-hop localizable if it can be localized by using only the information of at most k-hop neighbors. Theorem 3: In a graph G, a vertex is marked by Algorithm 2 if and only if it is one-hop localizable in G. Sufficiency: Algorithm 2 marks a vertex if it is in a one-hop wheel with three localizable nodes. Necessity: If a vertex x is one-hop localizable, it is included in a wheel with three localizable nodes by Theorem 2. thus x will be marked when Algorithm 1 is executed on the hub vertex. NETWORK-WIDE LOCALIZABILITY

Similar presentations









 University of Louisiana at Lafayette 3D Surface Localization.>")
 Raymond Chi-Wing Wong (Hong Kong University of.>")



The graph has the property 2) The graph is “far” from having.>")



 is a multi-hop wireless network that consists of mesh clients.>")





