Download presentation
Presentation is loading. Please wait.

1
Mathias Björk, u96835 AUTO3160 OPTICS

2
* Introduction to Robotics * Robotic applications * Components * Robotic Vision / Optics * Camera vision * Laser positioning systems * Fiber Optic Gyroscope

3
* Design * Structural appearance * Operation * Control system * Limits * Construction * Manufacturing * Operation * Testing Are all robots killer robots that want to take over the world?

4
Military applications - Recon missions - Surveillance - Enemy termination - Mine locating Industrial applications - Packaging - Arc welding - Soldering - Assembly - Measurements Medical applications - Surgery - Health monitoring

5
* Actuators (muscles) * Electric motors * Linear actuators (pneumatic, electric, hydraulic) * Air muscles * Piezo motors * Sensors (senses) * Touch (preassure) * Vision * Hearing * Elevation
 * Electric motors * Linear actuators (pneumatic, electric, hydraulic) * Air muscles * Piezo motors * Sensors (senses) * Touch (preassure) * Vision * Hearing * Elevation")
7
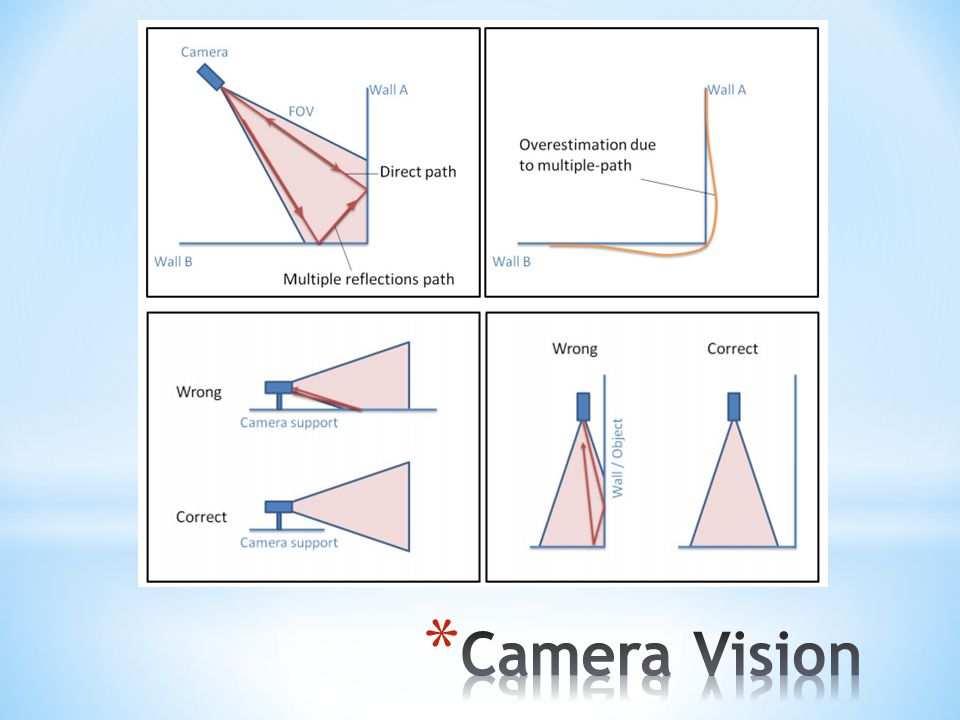
* Camera vision (visible spektrum, infra-red, heat) * Laser scanning systems * SONAR (Sound navigation and ranging)
 * Laser scanning systems * SONAR (Sound navigation and ranging)")
8
SwissRanger 4000 3D Camera Range:0.1-10.0 m Field of View:69º (h) x 56º (v) Illumination wavelength:850 nm Max frame rate:50 FPS Pixel Array Size:176 (h) x 144 (v) Environment:Indoor Connectors:UBS, Ethernet Cooling:Passive Software:C, C++, Matlab Angular resolution:0.39º Calibration:Automatic Acquisition modes:Continuous & Triggered http://www.youtube.com/watch?v=CIZCya7KBUQ http://www.youtube.com/watch?v=nHE9LFphg0g&feature=related
 x 56º (v) Illumination wavelength:850 nm Max frame rate:50 FPS Pixel Array Size:176 (h) x 144 (v) Environment:Indoor Connectors:UBS, Ethernet Cooling:Passive Software:C, C++, Matlab Angular resolution:0.39º Calibration:Automatic Acquisition modes:Continuous & Triggered v=CIZCya7KBUQ v=nHE9LFphg0g&feature=related")
10
SICK LD-OEM1000 to 5100 Laser Measurement System Range:0.5-35 m | 0.5-50 m | Field of View:360º (h) Illumination wavelength:905 nm (infrared) Scanning frequency:5-15 Hz Environment:Indoor Transmission:Serial (4800 Bd -> 115200 Bd) CanBus (10 kBit/s -> 1MBit/s) Ethernet (10 Mbit/s) Software:SICK SOPAS ET Angular resolution:0.125º - 1.5º
 Illumination wavelength:905 nm (infrared) Scanning frequency:5-15 Hz Environment:Indoor Transmission:Serial (4800 Bd -> Bd) CanBus (10 kBit/s -> 1MBit/s) Ethernet (10 Mbit/s) Software:SICK SOPAS ET Angular resolution:0.125º - 1.5º")
11
* 360 degrees horizontal plane * 4 evaluation fields of different shapes * Mirror tape can be used

13
* Angular velocity detection * 5 km optical fiber * Using the interference of light to detect mechanical rotation (Sagnac effect) * Phase shift is defined by:
 * Phase shift is defined by:")
Similar presentations


















 School of Computing, Informatics, and Decision Systems Engineering.>")



