Download presentation
Presentation is loading. Please wait.

1
微观交通仿真及其应用 初连禹 lchu@berkeley.edu 加州创新交通研究中心 加州交通管理实验室 长春, 2006 年 8 月 26 日

2
Introduction Microscopic simulation a software tool to model traffic system, including roads, drivers, and vehicles, in fine details. models: AIMSUN, CORSIM, MITSIM, PARAMICS, VISSIM… Why simulation? Can capture detailed traffic flow dynamics Can be calibrated to reproduce real world scenarios Can provide a visualization tool to evaluate traffic management and operational strategies answer “what if” questions

3
Applications Online/off-line applications Evaluate traffic management and operational improvements Model and Evaluate ITS Calibrate / optimize operational parameters of ITS strategies Develop / test new models, algorithms, control strategies

4
Paramics model PARAMICS: PARAllel MICroscopic Simulation a suite of software tools for micro traffic simulation, including: Modeller, Analyzer, Processor, Estimator, Programmer developer: Quadstone, Scotland Features large network simulation capability modeling the emerging ITS infrastructures OD estimation tool Application Programming Interfaces (API) access core models of the micro-simulator customize and extend many features of Paramics model complex ITS strategies complement missing functionalities of the current model
 access core models of the micro-simulator customize and extend many features of Paramics model complex ITS strategies complement missing functionalities of the current model")
5
How to model ITS: Application Programming Interfaces User Developer Output Interface Input Interface GUI Tools Professional Community Oversight Core Model API

6
function calls: vehicle related.. link related.. and others user-defined programs Main simulation loop Plugins API data Other applications /APIs functions PARAMICS API

7
Provided API Library Developed API Library Advanced Algorithms Adaptive Signal Control Adaptive Ramp Metering Dynamic Network Loading ATMIS Modules Data Handling Routing Ramp Signal CORBA Databases Demand XML PARAMICS Plug-in Development

8
Vissim vs Paramics Paramics is better in following aspects: Large-scale network modeling Faster simulation speed API OD estimation tool Conversion tool Vissim excels in Car-following model Easy learning Vissum, as planning model

9
Data needs Coverage Accuracy Data processing

10
Model Calibration Model needs to be calibrated before applications Capacity calibration OD Estimation Route choice calibration Bottleneck calibration

12
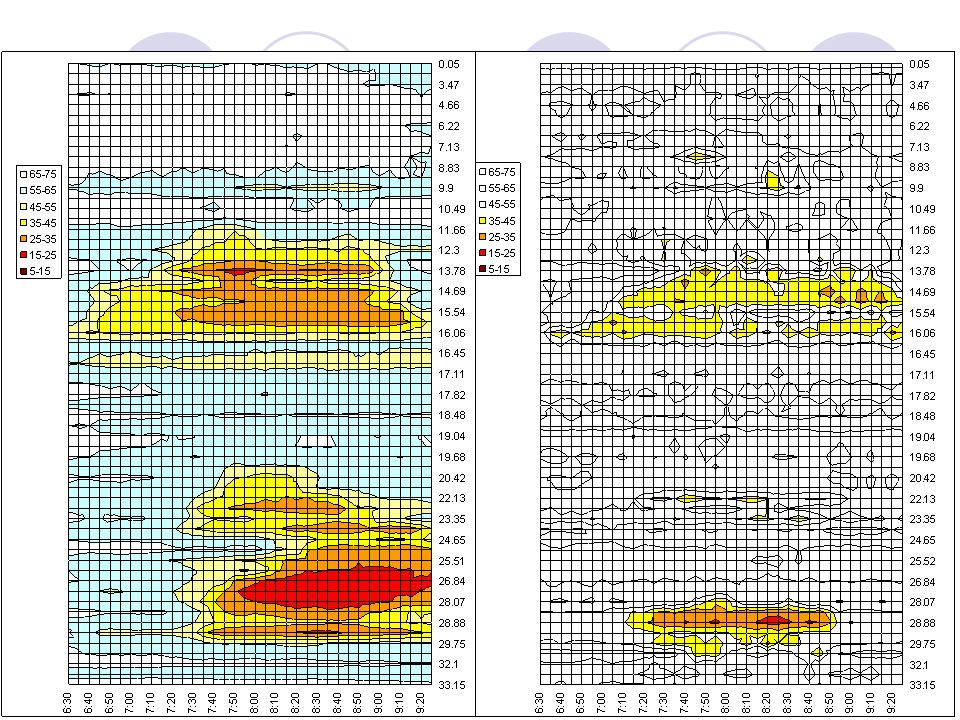
Proposed calibration targets Flow Within 25%-75% percentile Due to traffic congestion, variation Speed contours Three levels of targets Visual assessment Match Bottleneck Area Detailed Bottleneck Calibration

14
Sample applications

15
Signal control Signal Hardware-in-loop, testing 170 controller Adaptive signal control based on real-time delay estimation

16
Evaluation of Adaptive Ramp Metering Algorithms Algorithms ALINEA, BOTTLENECK, ZONE Morning peak hour (6:30-10:00) High Demand Low Demand Scenarios Recurrent congestion Non-recurrent congestion Incidents: block the rightmost lane for 10 minute at the beginning of congestion at the end of congestion
 High Demand Low Demand Scenarios Recurrent congestion Non-recurrent congestion Incidents: block the rightmost lane for 10 minute at the beginning of congestion at the end of congestion")
17
Evaluation of Adaptive Ramp Metering Algorithms (cont.)
")
18
Optimization of parameters of ALINEA ALINEA, A local feedback ramp-metering strategy Optimization method: Hybrid method: simulation + GA

19
Optimization of parameters of ALINEA (Cont.)
")
20
Ramp Metering Evaluation Platform What is it? A simple platform to guide Caltrans personnel on how to successfully manipulate the various aspects of the ramp-metering systems, including initializing parameters, fine tuning of parameters, performance analyses, and hypothetical "what if" simulated testing. What does it consist of? A library of metering algorithms either currently or potentially applied in California is included in this platform. The platform has intuitive graphical interfaces in order to facilitate Caltrans practitioners. How has it been used? Not yet deployed. How can it be used? provides a quick and cost-effective way to conduct ramp-metering studies.

21
Work zone Noticeable source of accidents and congestion AWIS: Automated Workzone Information Systems Components: Sensors Portable CMS Central controller Benefits: Provide traffic information Potentially Improve safety Enhance traffic system efficiency Evaluation of Traffic Delay Reduction from AWIS

22
Evaluation of Traffic Delay Reduction from AWIS (cont.)
")
23
Caltrans’ Traffic Management System master plan

24
Caltrans’ Traffic Management System master plan (cont.)
")
25
Corridor management Plan Demo Goal: to incorporate detailed multi-modal performance measurement and operational analysis into the traditional corridor planning efforts. Major Tool: Microscopic Traffic Simulation (Paramics) Outcome: A template for Caltrans to use in corridor planning efforts that will integrate both planning and operations To help to address the problem of lost system productivity during congestion, thereby improving mobility in the most cost effective manner.
 Outcome: A template for Caltrans to use in corridor planning efforts that will integrate both planning and operations To help to address the problem of lost system productivity during congestion, thereby improving mobility in the most cost effective manner..")
26
I-880 corridor simulation

27
I-880 improvement projects Interchange improvement SR-92 Davis Marina Mission Blvd Freeway mainline improvement Extend HOV lanes Add one more lane to both NB and SB SR-238 Construct auxiliary lanes Add an aux lane along SB 880 from SR-238 to A St. Add an aux lane along NB 880 from Tennyson to SR-92 Arterial improvement Widen Stevenson from 4 to 8 lanes …

28
Current I-880/SR92 Interchange SR92 I-880 I-880 improvement projects

29
A: Add 3- lane facility on SR92 EB which continues until I-880 interchange B: Remove a diagonal ramp to Hesperian NB and add two left turn lanes on loop ramp to Hesperian SB A B Proposed Improvements A & B

30
C: Remove SR92 to 880NB loop and add 3 lane flyover ramp(1 lane for HOV only). D: Improve the curvature of 880SB to SR92 WB E: Improve the curvature of 880NB to SR92 EB F: Remove SR92 to 880SB loop and add 1 lane flyover ramp C D E F Proposed Improvements C, D, E, & F

31
G: Add 1 aux lane on 880SB until Tennyson Rd H: Add 1 aux lane on 880 NB from Tennyson Rd G H Proposed Improvements G & H

32
I: Add 1 aux lane on 880 NB until Winton Ave J: Add 1 aux lane on 880 SB from Winton Ave J I Proposed Improvements I & J

33
I-880/SR92 Interchange Improvements

34
I-880/SR92 Interchange: After Improvement

35
Benefit Analysis of Selected Proposed Orange County Freeway Improvement Projects Project 1: Re-stripe left shoulder of I-5 between SR-55 interchange and SR-22/SR-57 interchange to add second HOV (High Occupancy Vehicle) lane. Project 2: Re-stripe left shoulder on I-5 between Tustin Ranch Road and SR-133 interchange to add continuous auxiliary lane. Project 3: Extend existing HOV lane on SR-55 from the I-405 to Victoria in both directions. Project 4-1: Add one general purpose lane on I-5 between the Orange/San Diego County line and Camino Capistrano. Project 4-2: Extend HOV lane on I-5 between the Orange/San Diego County line and Camino Capistrano.

36
Re-stripe left shoulder of I-5 between SR-55 interchange and SR-22/SR-57 interchange to add second HOV (High Occupancy Vehicle) lane
 lane")
37
Re-stripe left shoulder on I-5 between Tustin Ranch Road and SR-133 interchange to add continuous auxiliary lane

38
Extend existing HOV lane on SR-55 from the I-405 to Victoria in both directions

39
Add one general purpose lane on I-5 between the Orange/San Diego County line and Camino Capistrano

40
Extend HOV lane on I-5 between the Orange/San Diego County line and Camino Capistrano

41
ATMS Training and Development System What is it? A high-end simulator for use in Caltrans operator training efforts as well as a true testing facility for ATMS upgrades and enhancements within an environment with the full functionality of a Caltrans TMC. What does it consist of? An ITS Test Center and TMC Simulator that provides connectivity to the Testbed’s real- time data streams (field and simulated). Provides both “live”and “virtual” connections to Caltrans field traffic control systems. An adjoining “classroom” has capacity for fifteen Caltrans trainees. How has it been used? Provides Caltrans TMC operator training. How can it be used? Test and evaluate upgrades/enhancements to TMC operations in a secure environment that exactly duplicates actual TMC software systems and data feeds.
. Provides both live and virtual connections to Caltrans field traffic control systems. An adjoining classroom has capacity for fifteen Caltrans trainees. How has it been used. Provides Caltrans TMC operator training. How can it be used. Test and evaluate upgrades/enhancements to TMC operations in a secure environment that exactly duplicates actual TMC software systems and data feeds..")
42
loop data incident ramp metering, CMS messages ATMS Training and Development System

43
Objective: Evaluate the impacts of allowing use of High Occupancy Vehicle (HOV) lanes by single-occupant gasoline-electric hybrid vehicles Three major components: microscopic simulation modeling, emission modeling for HOV/hybrid system, demand modeling for future hybrid vehicles. Scenarios considered Effects by Allowing Single Occupant Hybrid Vehicles on HOV Lanes

44
Effects by Allowing Single Occupant Hybrid Vehicles on HOV Lanes (cont.)
")
45
Extension of Hybrid HOV Lane Micro- simulation Model Evaluation of the impacts of: allowing single-occupant vehicles to pay a toll to use the HOV lanes (so-called HOT lanes) the use of Caltrans District 12 HOV lanes as a part time system with no buffer separating the lanes (similar to the HOV system that exists in Caltrans District 4) Investigate the impacts of: Priority-based HOV operation Priority level Vehicle types 6Bus 5HOV 4 plus (includes van pools) 4HOV 3 3HOV 2 2Hybrids, Low Emission Vehicles (LEV) 1SOV willing to pay toll 0SOV
 the use of Caltrans District 12 HOV lanes as a part time system with no buffer separating the lanes (similar to the HOV system that exists in Caltrans District 4) Investigate the impacts of: Priority-based HOV operation Priority level Vehicle types 6Bus 5HOV 4 plus (includes van pools) 4HOV 3 3HOV 2 2Hybrids, Low Emission Vehicles (LEV) 1SOV willing to pay toll 0SOV")
46
Sub-network Simulation Components CORBA middle ware Network Monitoring API Vehicle Routing API Subnet Simulator 1 Other Supporting APIs Other Supporting APIs Other Supporting APIs Computer 1 Network Monitoring API Vehicle Routing API Subnet Simulator 2 Other Supporting APIs Other Supporting APIs Other Supporting APIs Computer 2 Network Monitoring API Vehicle Routing API Subnet Simulator 3 Other Supporting APIs Other Supporting APIs Other Supporting APIs Computer 3 Network Monitoring API Vehicle Routing API Subnet Simulator 4 Other Supporting APIs Other Supporting APIs Other Supporting APIs Computer 4 Global Network Database Global Network Monitoring Global Path Calculation Path Tree Storage Global Path Controller Distributed Paramics Modeling

47
On-line simulation

Similar presentations



 July 16, 2014.>")




 Analysis,>")






. ITS Produce Data The (sensor) data are used for to help take transportation management actions –Traffic control systems.>")




