Download presentation
Presentation is loading. Please wait.

1
Blind Search by Prof. Jean-Claude Latombe
Russell and Norvig: Chapter 3, Sections 3.4 – 3.6 Slides adapted from: robotics.stanford.edu/~latombe/cs121/2003/home.htm by Prof. Jean-Claude Latombe

2
Blind Search Depth first search Breadth first search
Iterative deepening No matter where the goal is, these algorithms will do the same thing.

3
Depth-First 1 fringe

4
Depth-First 1 2 fringe

5
Depth-First 1 2 3 fringe

6
Breadth First 1 fringe

7
Breadth First 1 2 fringe

8
Breadth First 1 3 2 fringe

9
Breadth First 1 3 2 4 fringe

10
Generic Search Algorithm
Path search(start, operators, is_goal) { fringe = makeList(start); while (state=fringe.popFirst()) { if (is_goal(state)) return pathTo(state); S = successors(state, operators); fringe = insert(S, fringe); } return NULL; Depth-first: insert=prepend; Breadth-first: insert=append
 { fringe = makeList(start); while (state=fringe.popFirst()) { if (is_goal(state)) return pathTo(state); S = successors(state, operators); fringe = insert(S, fringe); } return NULL; Depth-first: insert=prepend; Breadth-first: insert=append.")
11
Performance Measures of Search Algorithms
Completeness Is the algorithm guaranteed to find a solution when there is one? Optimality Is this solution optimal? Time complexity How long does it take? Space complexity How much memory does it require?

12
Important Parameters Maximum number of successors of any state branching factor b of the search tree Minimal length of a path in the state space between the initial and a goal state depth d of the shallowest goal node in the search tree

13
Evaluation of Breadth-first Search
b: branching factor d: depth of shallowest goal node Complete Optimal if step cost is 1 Number of nodes generated: 1 + b + b2 + … + bd = (bd+1-1)/(b-1) = O(bd) Time and space complexity is O(bd)
/(b-1) = O(bd) Time and space complexity is O(bd)")
14
Big O Notation g(n) is in O(f(n)) if there exist two positive constants a and N such that: for all n > N, g(n) af(n)
 is in O(f(n)) if there exist two positive constants a and N such that: for all n > N, g(n) af(n)")
15
Time and Memory Requirements
#Nodes Time Memory 2 111 .01 msec 11 Kbytes 4 11,111 1 msec 1 Mbyte 6 ~106 1 sec 100 Mb 8 ~108 100 sec 10 Gbytes 10 ~1010 2.8 hours 1 Tbyte 12 ~1012 11.6 days 100 Tbytes 14 ~1014 3.2 years 10,000 Tb Assumptions: b = 10; 1,000,000 nodes/sec; 100bytes/node

16
Evaluation of Depth-first Search
b: branching factor d: depth of shallowest goal node m: maximal depth of a leaf node Complete only for finite search tree Not optimal Number of nodes generated: 1 + b + b2 + … + bm = O(bm) Time complexity is O(bm) Space complexity is O(bm) or O(m)
 Time complexity is O(bm) Space complexity is O(bm) or O(m)")
17
Depth-Limited Strategy
Depth-first with depth cutoff k (maximal depth below which nodes are not expanded) Three possible outcomes: Solution Failure (no solution) Cutoff (no solution within cutoff)
 Three possible outcomes: Solution. Failure (no solution) Cutoff (no solution within cutoff)")
19
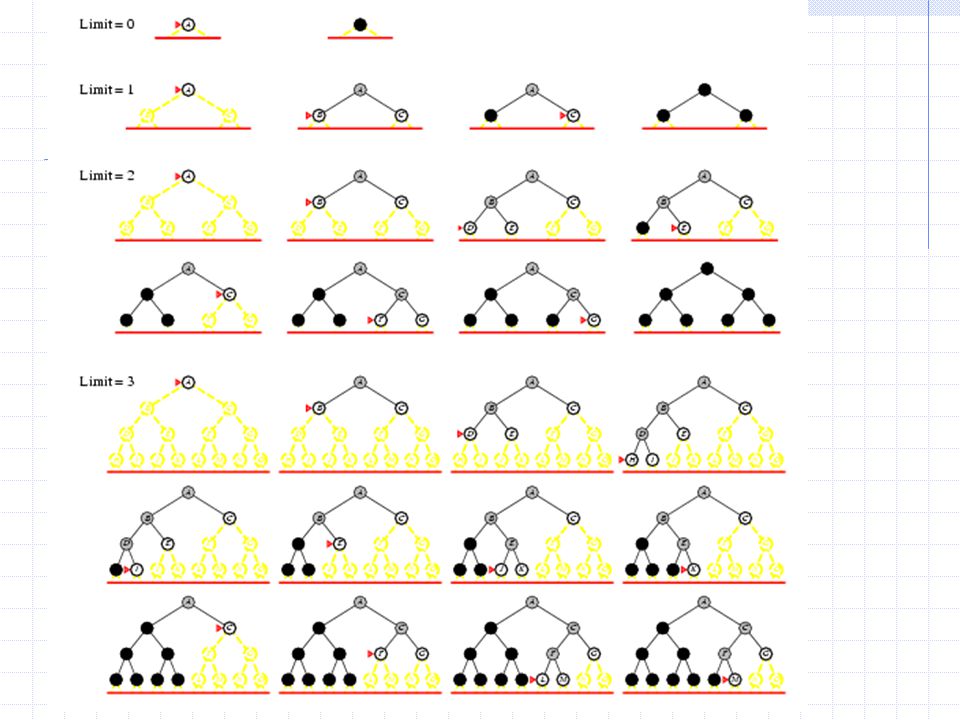
Iterative Deepening Strategy
Repeat for k = 0, 1, 2, …: Perform depth-first with depth cutoff k Complete Optimal if step cost =1 Space complexity is: O(bd) or O(d) Time complexity is: (d+1)(1) + db + (d-1)b2 + … + (1) bd = O(bd) Same as BFS! WHY???
 or O(d) Time complexity is: (d+1)(1) + db + (d-1)b2 + … + (1) bd = O(bd) Same as BFS! WHY")
20
Calculation db + (d-1)b2 + … + (1) bd = bd + 2bd-1 + 3bd-2 +… + db
bd(Si=1,…, ib(1-i)) = bd (b/(b-1))2
) = bd (b/(b-1))2.")
21
Comparison of Strategies
Breadth-first is complete and optimal, but has high space complexity Bad when branching factor is high Depth-first is space efficient, but neither complete nor optimal Bad when search depth is infinite Iterative deepening is asymptotically optimal

22
Uniform-Cost Strategy
Each step has some cost > 0. The cost of the path to each fringe node N is g(N) = costs of all steps. The goal is to generate a solution path of minimal cost. The queue FRINGE is sorted in increasing cost. S S G A B C 5 1 15 10 1 A 5 B 15 C G 11 G 10
 = costs of all steps. The goal is to generate a solution path of minimal cost. The queue FRINGE is sorted in increasing cost. S. S. G. A. B. C A. 5. B. 15. C. G. 11. G. 10.")
23
Repeated States No Few Many 1 2 3 4 5 6 7 8 search tree is finite
8-queens No assembly planning Few 1 2 3 4 5 6 7 8 8-puzzle and robot navigation Many search tree is finite search tree is infinite

24
Avoiding Repeated States
Requires comparing state descriptions Breadth-first strategy: Keep track of all generated states If the state of a new node already exists, then discard the node

25
Avoiding Repeated States
Depth-first strategy: Solution 1: Keep track of all states associated with nodes in current path If the state of a new node already exists, then discard the node Avoids loops Solution 2: Keep track of all states generated so far If the state of a new node has already been generated, then discard the node Space complexity of breadth-first

26
Summary Search strategies: breadth-first, depth-first, and variants
Evaluation of strategies: completeness, optimality, time and space complexity Avoiding repeated states

Similar presentations







 search algorithms) This Lecture Chapter 3.1-3.4 Next Lecture Chapter 3.5-3.7 (Please read lecture topic material before.>")
 Time? 1+b+b 2 +b 3 +… +b d + b(b d -1) = O(b d+1 ) Space? O(b d+1 ) (keeps every node.>")
 project # 1 and # 2 Chapter 4 (heuristic search)>")



 Search (Where we systematically explore alternatives) R&N: Chap. 3, Sect. 3.3–5.>")





