Download presentation
Presentation is loading. Please wait.

1
Introduction to Line Graphs Emphasizing their construction, clique decompositions, and regularity

2
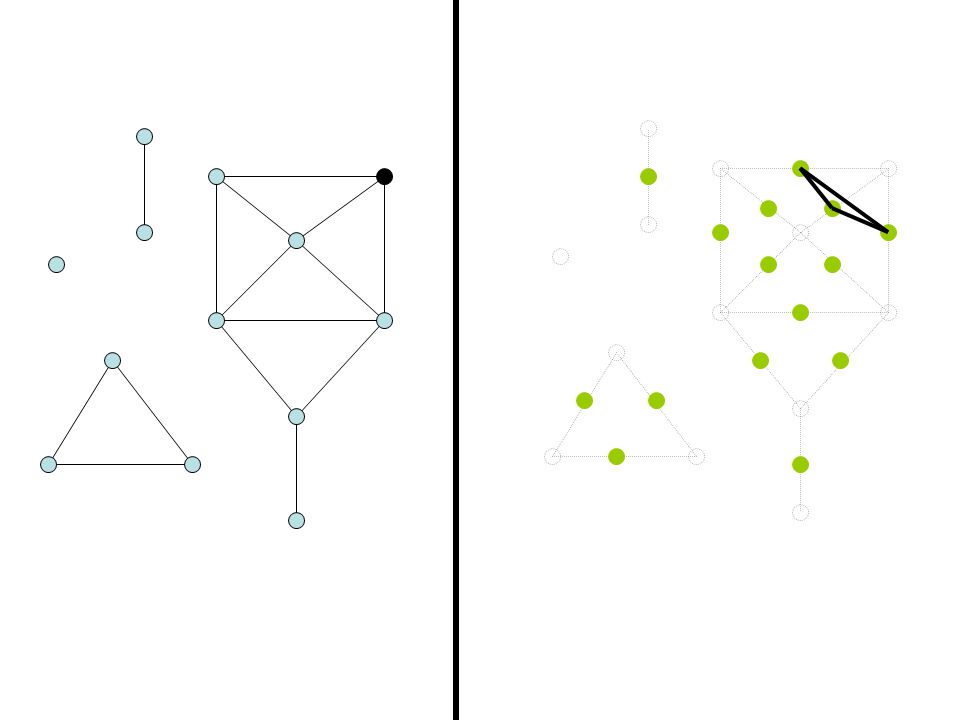
A given graph XIts line graph L(X) ??
")
12
This vertex has degree 1….…so it gives no new adjacencies.

16
This vertex has degree 1….…so it gives no new adjacencies.

17
This vertex also has degree 1….…so it gives no new adjacencies.

18
This vertex has degree 0….…so it gives no new adjacencies.

19
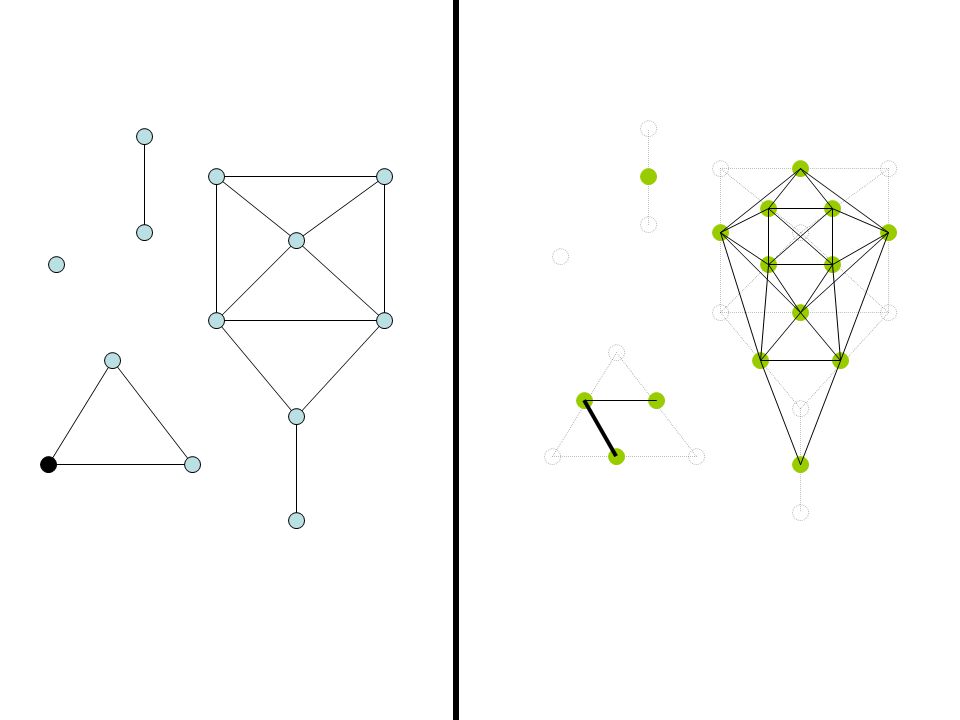
The given graph XIts line graph L(X)
")
20
The given graph XIts line graph L(X)
")
21
Definition of Line Graph Def. Given a graph X=(V,E), its line graph is the graph L(X) with vertex set E and where two distinct vertices e and e’ are adjacent iff the corresponding edges in graph X share an endpoint.
, its line graph is the graph L(X) with vertex set E and where two distinct vertices e and e’ are adjacent iff the corresponding edges in graph X share an endpoint..")
22
Vertices of degree ≥ 2Cliques partitioning edge set

23
Note: Each vertex is in ≤ 2 of these cliques.

24
Thm. (Krausz 1943) Let X be a nonempty simple graph. Then X is the line graph of some graph if and only if the edges of X can be partitioned into cliques so that each vertex belongs to ≤ 2. For an exposition of the proof, see West.

27
3 2 2 2 3 2 2 2

29
A vertex in only 1 clique is a pendant. (A deg 0 vertex is an isolated edge.)
")
30
P is Δ-free, so maximal cliques have size 2. So to cover the edges, each vertex must be in 3 cliques. So P cannot be a line graph.

31
P is Δ-free, so maximal cliques have size 2. So to cover the edges, each vertex must be in 3 cliques. So P cannot be a line graph. Same problem. So P cannot be a line graph.

34
Isolated vertices must correspond to isolated edges.

35
Each clique in the partition corresponds to a vertex.

36
Two vertices are adjacent iff their cliques share a vertex.

37
Vertices belonging to only a single clique correspond to pendants

38
L(X) X Success!!
 X Success!!")
39
Determining whether such a clique decomposition exists is computationally impractical for large graphs.

40
Determining whether such a clique decomposition exists is computationally impractical for large graphs. Beineke and Lehot developed a better approach in the 60’s & 70’s using results of van Rooij and Wilf.

41
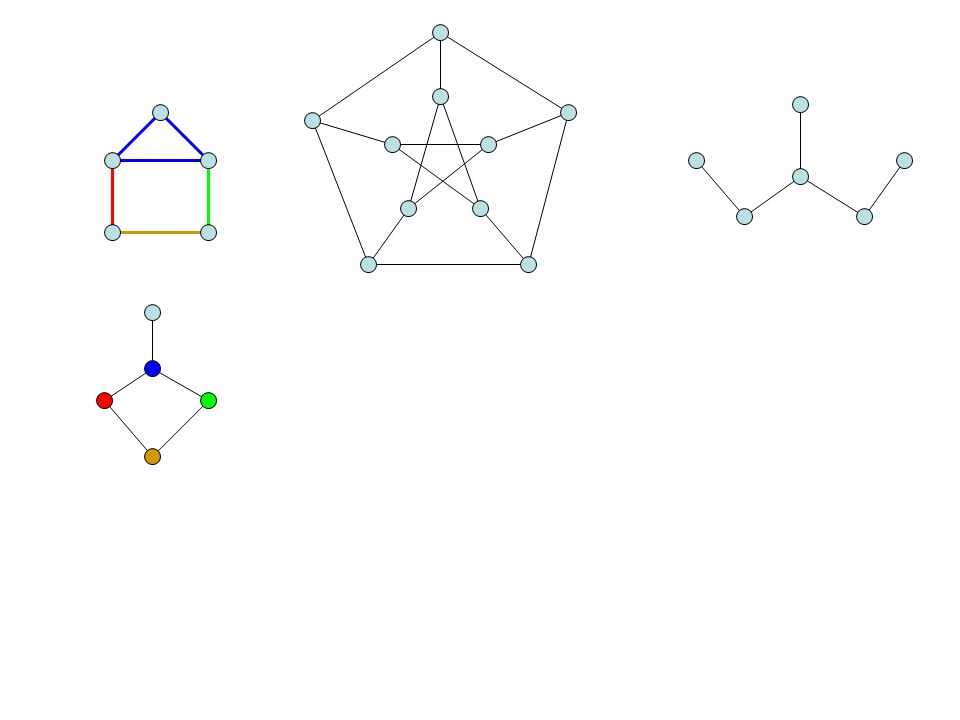
Determining whether such a clique decomposition exists is computationally impractical for large graphs. Beineke and Lehot developed a better approach in the 60’s & 70’s using results of van Rooij and Wilf. Theorem. (Beineke, 1968) A simple graph is a line graph if and only if it has none of the following as an induced subgraph:
 A simple graph is a line graph if and only if it has none of the following as an induced subgraph:.")
42
Alternatively, we could state the result as follows: Theorem. (Beineke, 1968) A simple graph is a line graph if and only each induced subgraph on 6 vertices is a line graph.
 A simple graph is a line graph if and only each induced subgraph on 6 vertices is a line graph..")
43
Alternatively, we could state the result as follows: Theorem. (Beineke, 1968) A simple graph is a line graph if and only each induced subgraph on 6 vertices is a line graph. This narrows the search; and in fact, there now exists a linear time algorithm to test whether a graph is a line graph! (It also produces such a graph when the answer is affirmative.)
 A simple graph is a line graph if and only each induced subgraph on 6 vertices is a line graph. This narrows the search; and in fact, there now exists a linear time algorithm to test whether a graph is a line graph. (It also produces such a graph when the answer is affirmative.).")
44
This graph is the line graph of each of the following: Non-uniqueness of the inverse problem….

45
This graph is the line graph of each of the following: Non-uniqueness of the inverse problem….

46
This graph is the line graph of each of the following: Non-uniqueness of the inverse problem….

47
This graph is the line graph of each of the following: Non-uniqueness of the inverse problem….

48
This graph is the line graph of each of the following: Non-uniqueness of the inverse problem….

49
K3K3 BUT… the problem is not any worse than these examples illustrate. K 1,3 Theorem. (Whitney, 1932) K 3 and K 1.3 are the ONLY pair of non- isomorphic connected graphs whose line graphs are isomorphic. “Star-Triangle” Issue (or “claw-triangle”)
 K 3 and K 1.3 are the ONLY pair of non- isomorphic connected graphs whose line graphs are isomorphic. Star-Triangle Issue (or claw-triangle ).")
50
Finally, some results about regularity and line graphs….

51
1.If X is regular (valency k), then L(X) is regular (valency 2k-2). L(X) k-1 regular X
, then L(X) is regular (valency 2k-2). L(X) k-1 regular X")
52
Finally, some results about regularity and line graphs…. 1.If X is regular (valency k), then L(X) is regular (valency 2k-2). 2.If L(X) is regular, then the components of X are regular or bipartite semi-regular. k-1 k regular L(X) regular X
, then L(X) is regular (valency 2k-2). 2.If L(X) is regular, then the components of X are regular or bipartite semi-regular. k-1 k regular L(X) regular X.")
53
Finally, some results about regularity and line graphs…. k-1 deg(x) deg(y) k deg(x) + deg(y) = k + 2 same for any y~x. xy regular L(X) 1.If X is regular (valency k), then L(X) is regular (valency 2k-2). 2.If L(X) is regular, then the components of X are regular or bipartite semi-regular. regular X
 deg(y) k deg(x) + deg(y) = k + 2 same for any y~x. xy regular L(X) 1.If X is regular (valency k), then L(X) is regular (valency 2k-2). 2.If L(X) is regular, then the components of X are regular or bipartite semi-regular. regular X.")
54
All must have same degree as y. xy k regular L(X)
")
55
deg(z) = deg(y) xy z k regular L(X)
 = deg(y) xy z k regular L(X)")
56
deg(a) = deg(x) xy z a k regular L(X)
 = deg(x) xy z a k regular L(X)")
57
degrees must alternate! xy z a d b f e c g k regular L(X) If X is connected: there can be at most 2 degrees in X. if X has an odd cycle, X is regular. else X is bipartite and semi-regular. … Therefore …
 If X is connected: there can be at most 2 degrees in X. if X has an odd cycle, X is regular. else X is bipartite and semi-regular. … Therefore ….")
58
Two results about regularity and line graphs 1.If X is regular (valency k), then L(X) is regular (valency 2k-2). 2.If L(X) is regular, then the components of X are regular or bipartite semi-regular.
 is regular, then the components of X are regular or bipartite semi-regular..")
59
Review of topics Definition of line graphs Cliques partitioning edges of L(X) using vertices in X of degree ≥ 2 Beineke’s 9 forbidden subgraphs Non-uniqueness of inverse problem Whitney’s star-triangle result Regularity in X and L(X)
 using vertices in X of degree ≥ 2 Beineke’s 9 forbidden subgraphs Non-uniqueness of inverse problem Whitney’s star-triangle result Regularity in X and L(X)")
61
The End

Similar presentations



















 13 – 20.>")




 in.>")


 such that S has more than one component. Connectivity of G ((G)): The.>")


 such that G-S has more than one component. d f b e a g c i h.>")
 S, where |S|=k. The labels are colors; the vertices of one color form a color.>")


