Download presentation
Presentation is loading. Please wait.

1
P.J. Healy pj@hss.caltech.edu California Institute of Technology Learning Dynamics for Mechanism Design An Experimental Comparison of Public Goods Mechanisms

2
The Repeated Public Goods Implementation Problem Example: Condo Association “special assessment” –Fixed set of agents regularly choosing public good levels. –Goal is to maximize efficiency across all periods –What mechanism should be used? Questions: –Are the “one-shot” mechanisms the best solution to the repeated problem? –Can one simple learning model approximate behavior in a variety of games with different equilibrium properties? –Which existing mechanisms are most efficient in the dynamic setting?

3
Previous Experiments on Public Goods Mechanisms I Dominant Strategy (VCG) mechanism experiments –Attiyeh, Franciosi and Isaac ’00 –Kawagoe and Mori ’01 & ’99 pilot –Cason, Saijo, Sjostrom, & Yamato ’03 –Convergence to strict dominant strategies –Weakly dominated strategies are observed
 mechanism experiments –Attiyeh, Franciosi and Isaac ’00 –Kawagoe and Mori ’01 & ’99 pilot –Cason, Saijo, Sjostrom, & Yamato ’03 –Convergence to strict dominant strategies –Weakly dominated strategies are observed")
4
Previous Experiments on Public Goods Mechanisms II Nash Equilibrium mechanisms –Voluntary Contribution experiments –Chen & Plott ’96 –Chen & Tang ’98 –Convergence iff supermodularity (stable equil.) Results consistent with best response behavior
 Results consistent with best response behavior")
5
k-period Best Response model –Agents best respond to pure strat. beliefs –Belief = unweighted average of the others’ strategies in the previous k periods Needs convex strategy space –Rational behavior, inconsistent beliefs –Pure strategies only A Simple Learning Model

6
–Strictly dominated strategies: never played –Weakly dominated strategies: possible –Always converges in supermodular games –Stable/convergence => Nash equilibrium –Can be very unstable (cycles w/ equilibrium) A Simple Learning Model: Predictions
 A Simple Learning Model: Predictions")
7
New experiments over 5 public goods mechanisms –Voluntary Contribution –Proportional Tax –Groves-Ledyard –Walker –Continuous VCG (“cVCG”) with 2 parameters Identical environment (endow., prefs., tech.) 4 sessions each with 5 players for 50 periods Computer Interface –History window & “What-If Scenario Analyzer” A New Set of Experiments
 with 2 parameters Identical environment (endow., prefs., tech.) 4 sessions each with 5 players for 50 periods Computer Interface –History window & What-If Scenario Analyzer A New Set of Experiments")
8
Agents: Private Good: Public Good: Endowments: Preferences: Technology: Mechanisms: The Environment

9
The Mechanisms Voluntary Contribution Proportional Tax Groves-Ledyard Walker VCG

10
Experimental Results I: Choosing k Which value of k minimizes the M.A.D. across all mechanisms, sessions, players and periods? k=5 is the most accurate

14
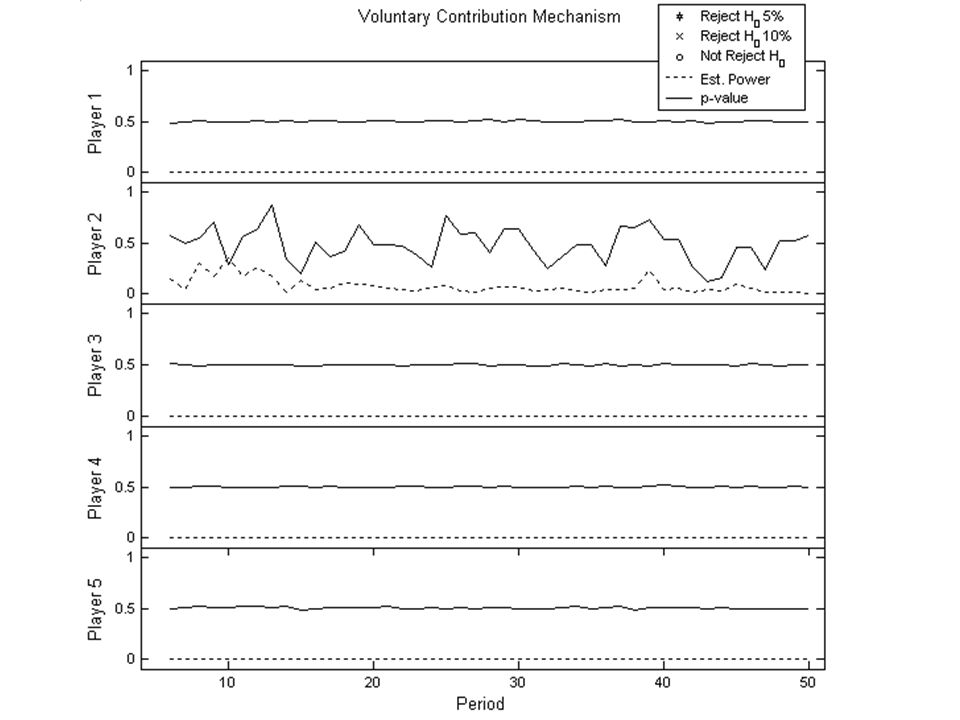
Experimental Results: 5-B.R. vs. Equilibrium Null Hypothesis: Non-stationarity => period-by-period tests Non-normality of errors => non-parametric tests –Permutation test with 2,000 sample permutations Problem: If then the test has little power Solution: –Estimate test power as a function of –Perform the test on the data only where power is sufficiently large.

15
Simulated Test Power

20
5-period B.R. vs. Equilibrium Voluntary Contribution (strict dom. strats): Groves-Ledyard (stable Nash equil): Walker (unstable Nash equil): 73/81 tests reject H 0 –No apparent pattern of results across time Proportional Tax: 16/19 tests reject H 0
: Groves-Ledyard (stable Nash equil): Walker (unstable Nash equil): 73/81 tests reject H 0 –No apparent pattern of results across time Proportional Tax: 16/19 tests reject H 0.")
21
Interesting properties of the 2-parameter cVCG mechanism Best response line in 2-dimensional strategy space

22
Best Response in the cVCG mechanism Convert data to polar coordinates Dom. Strat. = origin, B.R. line = 0-degree line

24
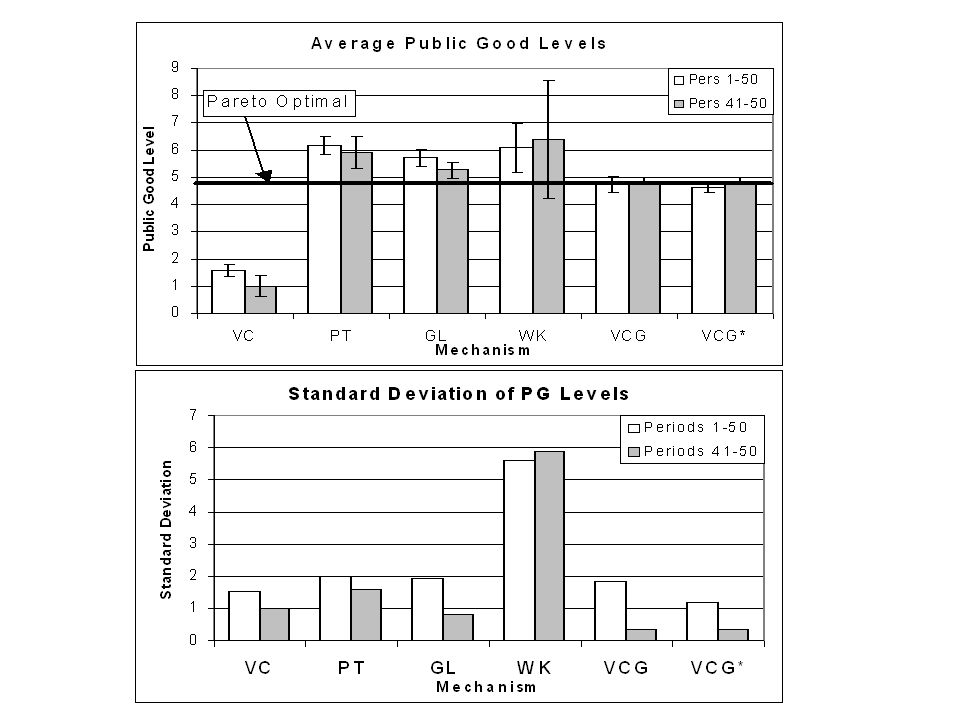
Experimental Results III: Efficiency Outcomes are closest to Pareto optimal in cVCG –cVCG > GL ≥ PT > VC > WK (same for efficiency) –Sensitivity to parameter selection Variance of outcomes: –cVCG is lowest, followed by Groves-Ledyard –Walker has highest Walker mechanism performs very poorly –Efficiency below the endowment –Individual rationality violated 42% of last 10 periods
 –Sensitivity to parameter selection Variance of outcomes: –cVCG is lowest, followed by Groves-Ledyard –Walker has highest Walker mechanism performs very poorly –Efficiency below the endowment –Individual rationality violated 42% of last 10 periods")
25
Discussion & Conclusions Data are consistent with the learning model. –Repercussions for theoretical research Should worry about dynamics –k-period best response studied here, but other learning models may apply Example: Instability of the Walker mechanism cVCG mechanism can perform efficiently Open questions: –cVCG behavior with stronger conflict between incentives and efficiency –Sensitivity of results to parameter changes –Effect of “What-If Scenario Analyzer” tool

29
Voluntary Contribution Mechanism Results

Similar presentations























, and an assumption.>")




