Download presentation
Presentation is loading. Please wait.

1
Data Structures and Algorithms (AT70.02) Comp. Sc. and Inf. Mgmt. Asian Institute of Technology Instructor: Dr. Sumanta Guha Slide Sources: CLRS “Intro. To Algorithms” book website (copyright McGraw Hill) adapted and supplemented
 adapted and supplemented.")
2
CLRS “Intro. To Algorithms” Ch. 24: Single-Source Shortest Paths

3
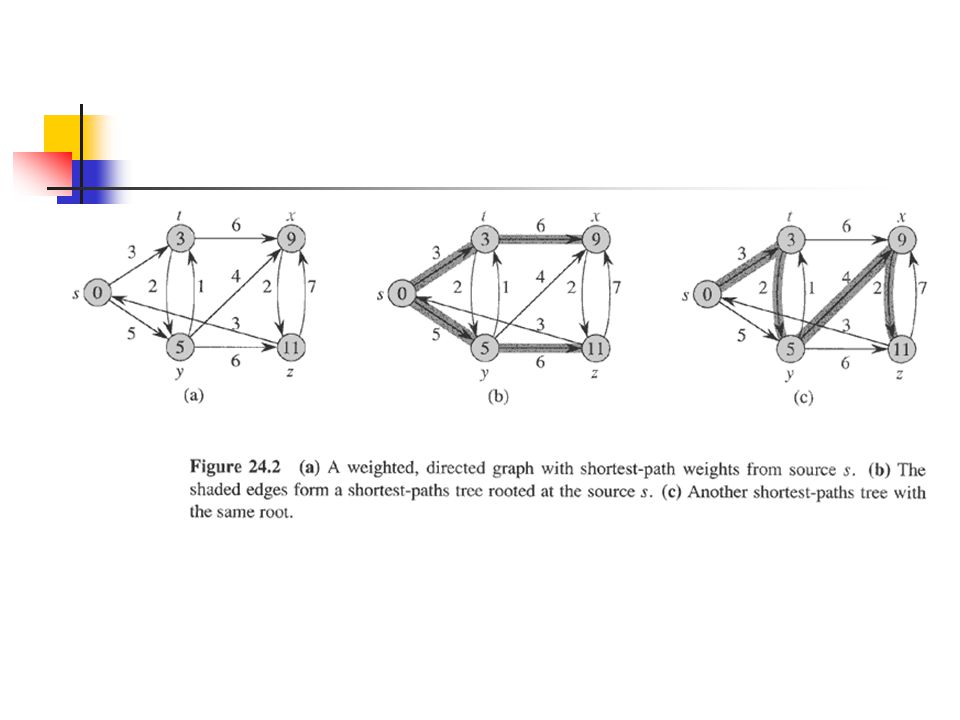
The shortest-path weight from s to v is denoted δ(s,v)
")
5
Π(v) is the predecessor of v in the shortest path to v.
 is the predecessor of v in the shortest path to v.")
8
Properties of shortest paths and relaxation Triangle inequality: for any edge (u,v) E, we have δ(s,v) δ(s,u) + w(u,v). Upper bound property: We always have d[v] ≥ δ(s,v) for all vertices v V, and once d[v] achieves the value δ(s,v), it never changes (even with further relaxations). No-path property: If there is no path from s to v, then we always have d[v] = δ(s,v) = . Convergence property: If s … u v is a shortest path in G for some u, v V, and if d[u] = δ(s,u) at any time prior to relaxing edge (u,v), then d[v] = δ(s,v) at all times afterwards. Path relaxation property: If p = (v 0, v 1, …, v k ) is a shortest path from s = v 0 to v k, and the edges of p are relaxed in the order (v 0,v 1 ), (v 1,v 2 ), …, (v k-1,v k ), then d[v k ] = δ(s,v k ). This property holds regardless of any other relaxation steps that occur, even if they are intermixed with relaxations of the edges of p. Predecessor-subgraph property: Once d[v] = δ(s,v) for all v V, the predecessor subgraph is a shortest paths tree rooted at s. (In fact, if there is no negative-weight cycle reachable from s then the predecessor subgraph is always a tree rooted at s.)
 for all vertices v V, and once d[v] achieves the value δ(s,v), it never changes (even with further relaxations). No-path property: If there is no path from s to v, then we always have d[v] = δ(s,v) = . Convergence property: If s … u v is a shortest path in G for some u, v V, and if d[u] = δ(s,u) at any time prior to relaxing edge (u,v), then d[v] = δ(s,v) at all times afterwards. Path relaxation property: If p = (v 0, v 1, …, v k ) is a shortest path from s = v 0 to v k, and the edges of p are relaxed in the order (v 0,v 1 ), (v 1,v 2 ), …, (v k-1,v k ), then d[v k ] = δ(s,v k ). This property holds regardless of any other relaxation steps that occur, even if they are intermixed with relaxations of the edges of p. Predecessor-subgraph property: Once d[v] = δ(s,v) for all v V, the predecessor subgraph is a shortest paths tree rooted at s. (In fact, if there is no negative-weight cycle reachable from s then the predecessor subgraph is always a tree rooted at s.).")
9
If there is no negative edge weight cycle reachable from s then Bellman-Ford returns TRUE and d[v] = δ(s,v) for every vertex v. If there is a negative edge weight cycle reachable from s then Bellman-Ford returns FALSE. Running time: (|V||E|)
![If there is no negative edge weight cycle reachable from s then Bellman-Ford returns TRUE and d[v] = δ(s,v) for every vertex v.](http://images.slideplayer.com/13/4168385/slides/slide_9.jpg "If there is a negative edge weight cycle reachable from s then Bellman-Ford returns FALSE. Running time: (|V||E|).")
14
// all edge weights are assumed non-negative

15
Proof that Dijkstra is correct

16
x 1 – x 2 ≤ 0, x 1 – x 5 ≤ -1, x 2 – x 5 ≤ 1, x 3 – x 1 ≤ 5, x 4 – x 1 ≤ 4, x 4 – x 3 ≤ -1, x 5 – x 3 ≤ -3, x 5 – x 4 ≤ -3. Th. 24.9: Given a system Ax ≤ b of difference equations, let G = (V, E) be the corresponding constraint graph. If G contains no negative-weight cycles, then x = ( δ(v 0, v 1 ), δ(v 0, v 2 ), …, δ(v 0, v k ) ) is a feasible solution for the system. If G contains a negative-weight cycle, then there is no feasible solution for the system.
 be the corresponding constraint graph. If G contains no negative-weight cycles, then x = ( δ(v 0, v 1 ), δ(v 0, v 2 ), …, δ(v 0, v k ) ) is a feasible solution for the system. If G contains a negative-weight cycle, then there is no feasible solution for the system..")
17
Problems Ex. 24.1-1 Ex. 24.2-1 Ex. 24.3-1 Ex. 24.3-2 Ex. 24.3-4 Ex. 24.4-1 Ex. 24-4.2 Ex. 24.4-4

Similar presentations



 accounts.>")


 : weighted, directed graph w : E R : weight function P=>")

 : weighted, directed graph w : E R : weight function P=>")
>")

 of a path is the sum of the weights of its edges. adcbe Path p: 7 2 1 5 Edge weights: w(a, b) = 7, w(b, c) = 2, w(c,>")
 Comp. Sc. and Inf. Mgmt. Asian Institute of Technology Instructor: Dr. Sumanta Guha Slide Sources: CLRS “Intro.>")

 Problem Application of s-s-s-p for Solving a System of Difference Constraints.>")







