Download presentation
Presentation is loading. Please wait.

1
VEHICLE ROUTING PROBLEM
אליאור זיברט דרור חבלין

2
Classical Vehicle Routing
n customers must be served from a single depot utilizing vehicle with capacity Q for delivering goods Each customer requires a quantity qi ≤ Q of goods Customer orders cannot be split

3
Additional Features Depots Multiple locations Vehicles
Multiple vehicle types and capacities Release, maximum and down times Customers Time windows (soft or hard) Accessibility restrictions Priority Pickup and delivery Routes Maximum time Link costs Objective Functions Minimize total traveled distance Minimize total traveled time Minimize number of vehicles Maximize quality of service Multiple objective functions
 Accessibility restrictions. Priority. Pickup and delivery. Routes. Maximum time. Link costs. Objective Functions. Minimize total traveled distance. Minimize total traveled time. Minimize number of vehicles. Maximize quality of service. Multiple objective functions.")
4
How Can It Be Solved ??? Heuristics that Grow Fragments
Nearest neighbor Double-ended nearest neighbor Multiple fragment heuristic Heuristics that Grow Tours Nearest addition Farthest addition Random addition Heuristics Based on Trees Minimum spanning tree Christofides heuristic Fast recursive partitioning Nearest neighbor Randomly select a starting node 2. Add to the last node the closest node until no more nodes are available 3. Connect the last node with the first node 4. O(n2) running time Double-ended nearest neighbor Conceptually the same as nearest neighbor heuristic 2. The fragment is allowed to grow from both ends Multiple Fragment Heuristic - This heuristic considers the edges of the graph in increasing order of length and it adds any edge that will not make it impossible to complete a tour (i.e., it avoids cycles and vertices of degree three) Minimum Spanning Tree Construct a minimum spanning tree 2. Traverse the tree to build a tour by eliminating edges from vertices with degree three and adding edges to vertices with degree one Clarke and Wright Heuristic – 1. Start with an initial solution where each customer is serviced individually from the depot AND MANY MORE
 running time. Double-ended nearest neighbor - 1. Conceptually the same as nearest neighbor heuristic. 2. The fragment is allowed to grow from both ends. Multiple Fragment Heuristic - This heuristic considers the edges of the graph in increasing order of length and it adds any edge that will not make it impossible to complete a tour (i.e., it avoids cycles and vertices of degree three) Minimum Spanning Tree - 1. Construct a minimum spanning tree. 2. Traverse the tree to build a tour by eliminating edges from vertices with degree three and adding edges to vertices with degree one. Clarke and Wright Heuristic – 1. Start with an initial solution where each customer is serviced. individually from the depot. AND MANY MORE.")
5
Ant Colony Optimization (ACO)
OUR CHOICE OF ALGORITHEM Ant Colony Optimization (ACO)
")
6
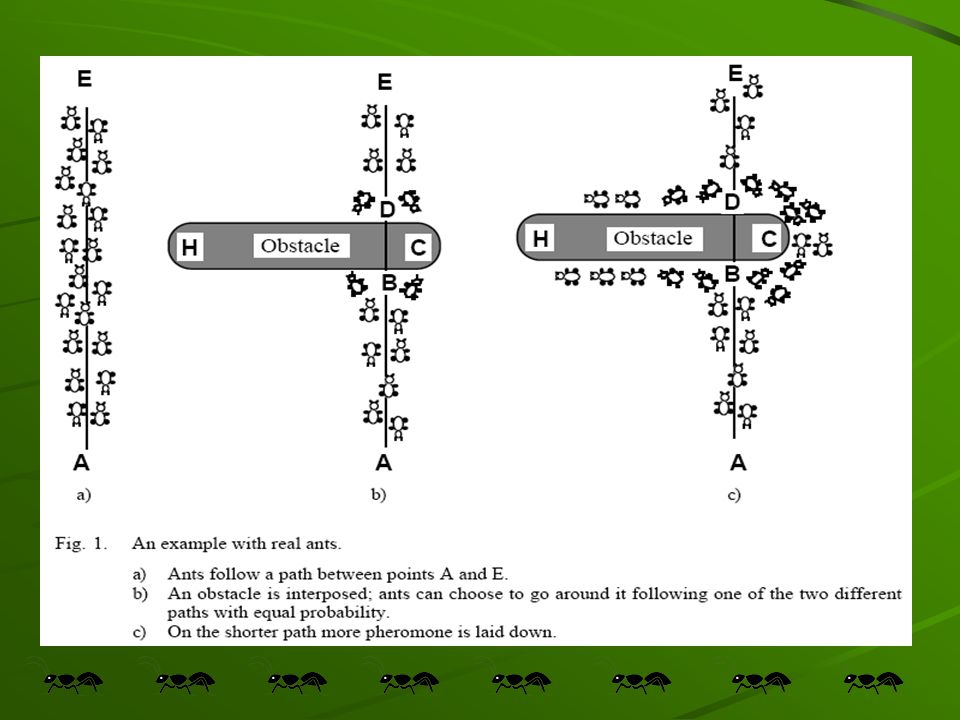
ACO Concepts Ants (blind) navigate from nest to food source
Shortest path is discovered via pheromone trails each ant moves at random pheromone is deposited on path ants detect lead ant’s path, inclined to follow more pheromone on path increases probability of path being followed Ant Colony Optimisation has been inspired by the foraging behaviour of real ants. Ants randomly explore the surroundings of the anthill; when they find food, they return to the nest depositing a pheromone trail, a trace of a chemical substance that can be smelled by other ants. Ants can follow various paths to the food source and back, but it has been observed that, thanks to the reinforcement of the pheromone trail by successive passages, only the shortest path remains in use, since ants prefer to follow stronger pheromone concentrations. Pheromone reinforcement is autocatalytic, since the shortest the path, the least time will be taken to travel back and forth, and therefore, while ants on longer paths are still in transit, the ants on the shortest path can restart the route again, reinforcing the pheromone trail on the shortest path. Over time, the majority of the ants will travel on that path, while a minority will still choose alternative paths. The behaviour of this minority is important, since it allows to explore the environment to find even better solutions, which initially were not considered. The choice of the path is therefore probabilistic and, while it is strongly influenced by the pheromone intensity, it still allows for random deviations from the current best solution.

8
ACO System Virtual “trail” accumulated on path segments
Starting node selected at random Path selected at random based on amount of “trail” present on possible paths from starting node higher probability for paths with more “trail” Ant reaches next node, selects next path Continues until reaches starting node Finished “tour” is a solution

9
ACO System, cont. A completed tour is analyzed for optimality
“Trail” amount adjusted to favor better solutions better solutions receive more trail worse solutions receive less trail higher probability of ant selecting path that is part of a better-performing tour New cycle is performed Repeated until most ants select the same tour on every cycle (convergence to solution)
")
10
ANT ALGORITHEM

11
The Algorithm At the beginning of the search process, a constant amount of pheromone is assigned to all arcs. When located at a node i an ant k uses the pheromone trail to compute the probability of choosing j as the next node: α - is a weight function based on arc cost etc.. β – is a weight function base on arc lengthi When all ants have comleted a tour each ant compute the quantity per unit of length , the pheromone value changes as follows: By using this rule, the probability increases that forthcoming ants will use this arc. Ant Colony Algorithms are typically use to solve minimum cost problems We may usually have N nodes and A undirected arcs There are two working modes for the ants: either forwards or backwards. Pheromones are only deposited in backward mode. The ants evaluate the cost of the paths they have traversed. The shorter paths will receive a greater deposit of pheromones. An evaporation rule will be tied with the pheromones, which will reduce the chance for poor quality solutions. at the end of each iteration, global update uses only the best solution, computed so far, to update the pheromone trail. The only edges that are modified are those edges i–j belonging to the best solution.

12
Our Code Design :

13
results

14
More result

Similar presentations

 – Spring 2013 Computer Science Department Technion - Israel.>")
















: Applications to Scheduling>")
