Download presentation
Presentation is loading. Please wait.

1
Multiple Removal with Local Plane Waves
Dmitri Lokshtanov

2
Content Motivation WE multiple suppression operator
Fast 2D/3D WE approach for simple sea-floor 2D/3D WE approach for irregular sea-floor Conclusions

3
Motivation Seismic processing and imaging - main challenges:
Velocity model building for sub-salt and sub-basalt imaging Removal of multiples from strong irregular boundaries

5
Near offset section (no AGC)
")
6
Depth migration with water velocity

7
Input shot gathers (no AGC)
")
8
Multiple suppression For multiples from complex boundaries the methods based on periodicity or kinematic discrimination usually don’t work or are not sufficient. In such cases the main demultiple tools are based on the Surface Related Multiple Elimination (SRME) or Wave-Equation (WE) techniques.
 or Wave-Equation (WE) techniques.")
9
SRME (Berkhout, 1982; Verschuur, 1991) – advantages and limitations
Does not require any structural information. Predicts all free-surface multiples As a rule becomes less efficient with increased level of interference of multiples of different orders Requires the same dense sampling between sources as between receivers Noise in data and poor sampling significantly degrade the prediction quality Missing traces required by 3D SRME are reconstructed with least-square Fourier or Radon interpolation; residual NMO correction; DMO/inverse DMO; migration/demigration

10
WE approach versus SRME
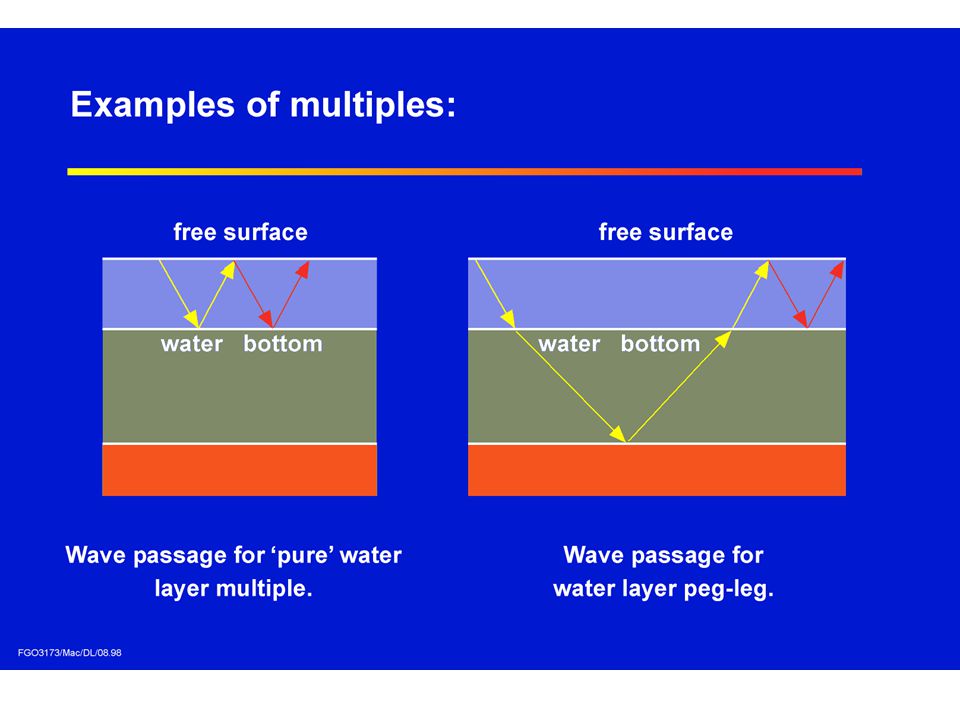
SRME is the method of preference for data from areas with deep sea-floor, especially when a thick package of strong reflectors is present below the sea-floor WE approach is especially efficient when the main free-surface multiples are just ‘pure’ water-layer multiples and peg-legs. Gives usually better results than SRME when several orders of multiples are involved 3D WE approach has less sampling problems than 3D SRME and it gives a flexiblility in methods for wavefield extrapolation depending on complexity of structure

11
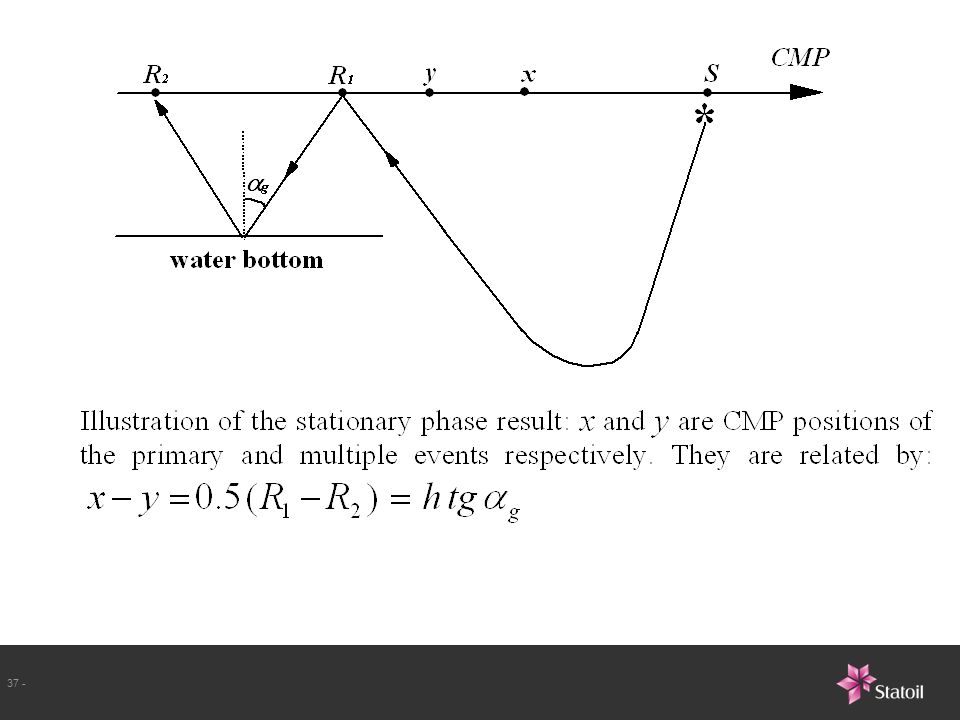
The operator Pg transforms the primary reflection event recorded at receiver 1 into the multiple event recorded at receiver 2 (Wiggins, 1988; Berryhill & Kim, 1986). The operator Pg transforms the primary reflection event recorded at receiver 1 into the multiple event recorded at receiver 2 (Wiggins, 1988; Berryhill & Kim, 1986).
.")
12
Principles of WE approach

13
Adaptive subtraction of predicted multiples

14
Wave-equation approach – main features
All predicted multiples are split into 3 terms, where each term requires the same amplitude correction All source-side and receiver-side multiples of all orders are suppressed simultaneously in one consistent step The prediction and the adaptive subtraction of multiples are performed in the same domain Fast version (WEREM) for a simple sea-floor. Slower version for irregular sea-floor
 for a simple sea-floor. Slower version for irregular sea-floor.")
15
Why in the tau-p domain Easier to apply antialiasing protection
No problems with muting of direct arrival Easier to define ‘multiple’ zone of tau-p domain and mute it away Estimated reflection coefficients are explicitly angle dependent

16
2D WEREM – prediction of multiples - 1

17
2D WEREM – prediction of multiples - 2

18
Velocity model used to generate synthetic FD data

19
Constant P sections (angle at the surface is about 3º)
Input After Werem After Remul

20
Constant P sections (angle at the surface is about 15º)
Input After Werem After Remul

21
Velocity model 2 used to generate synthetic FD data

22
Constant P sections (angle at the surface is about 3º)
m. residual Input After Werem

23
Stack before multiple suppression Stack after Werem
T. Shetland T. Draupne T. Brent Stack before multiple suppression Stack after Werem

24
Constant P sections (angle at the surface is about 10º
Input After Werem

25
Stack before multiple suppression (left) and after Werem multiple suppression (right).
The pink line shows the expected position of the first-order water-layer peg-leg from the Top Cretaceous (black line). The multiple period is about 140 msec.
. The multiple period is about 140 msec.")
26
Constant P sections (angle at the surface is about 8º
Input After Werem multiple suppression Difference

27
raw stack

28
stack after WEREM

29
500 m input WEREM

30
4000 m input WEREM

31
Improving the results - local prediction / subtraction of multiples
Within the same prediction term, for the same CMP and the same p we have events reflected at different positions along the water bottom Inconsistency between prediction and subtraction in case of rapid variation of sea-floor reflectivity The problem is partly solved by applying adaptive subtraction in different time windows Or by making prediction dependent on both p and offset (window)
")
32
3D WEREM – basic features
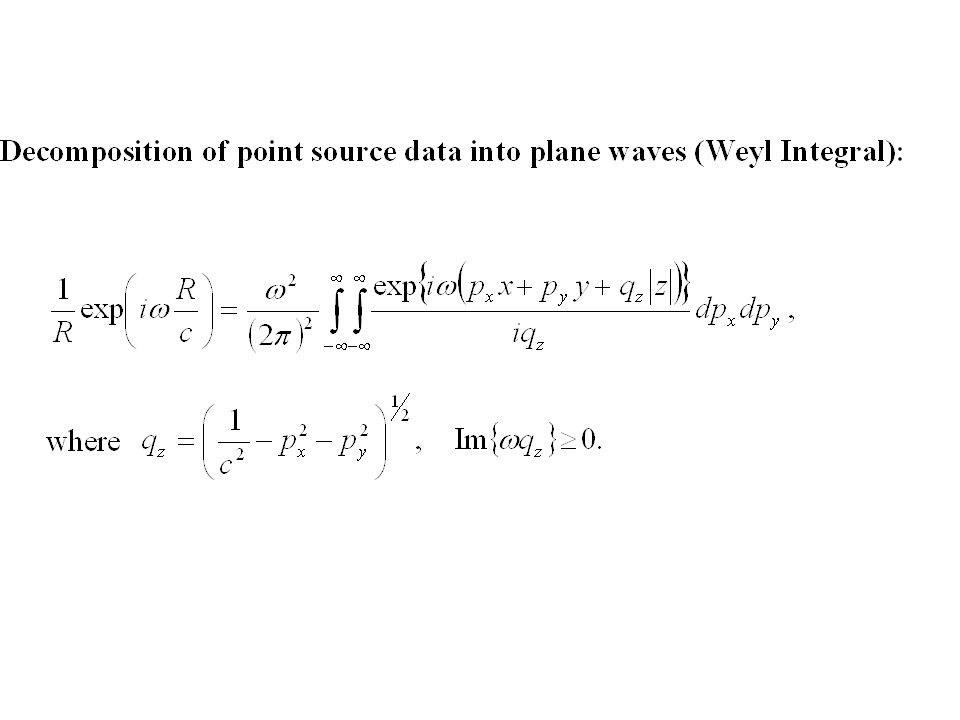
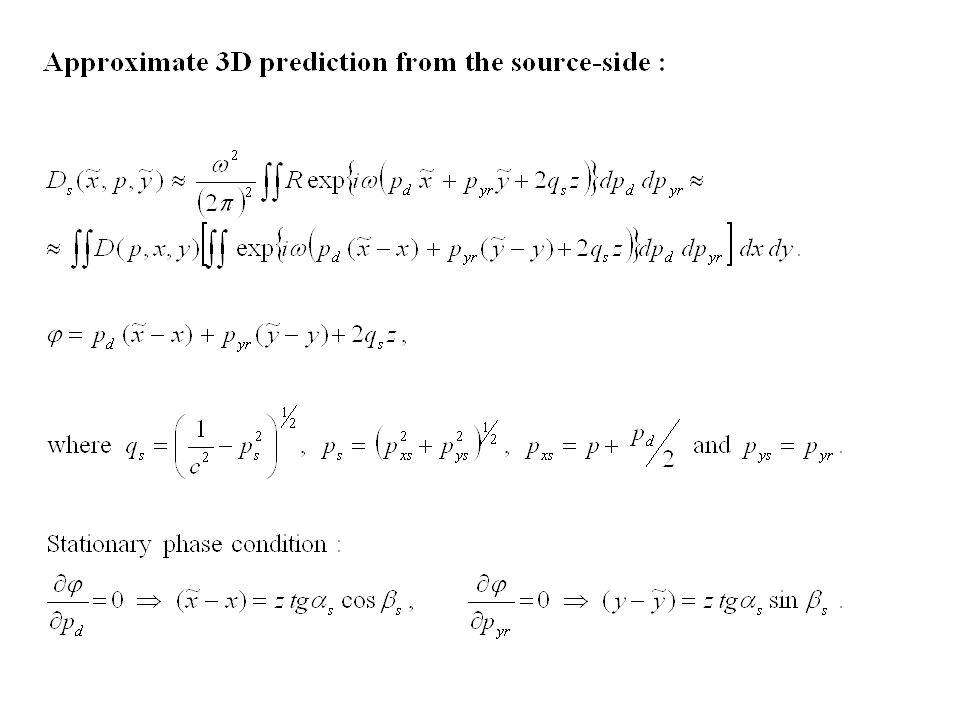
3D data can be represented as a sum of plane waves with different vertical angles and azimuths from the source-side and receiver-side. Current quasi 3D marine acquisition does not allow full 4D decomposition Decomposition uniquely defines the direction of propagation from the receiver-side and is an integral over crossline slownesses from the source-side The result of decomposition are used for exact prediction of multiples from the receiver-side and approximate prediction from the source-side The approximation is that the crossline slowness from the source-side is the same as from the receiver-side (the same azimuth for 1D structures). The approximation allows us to mix data for flip flop shooting
. The approximation allows us to mix data for flip flop shooting.")
39
Input constant P section (small angles)
")
40
Predicted multiples – R-side (small angles)
")
41
Input constant P section (small angles)
")
42
Constant P section – after prediction / subtraction (small angles)
")
43
Difference (Input – 3D WEREM), small angles
, small angles")
44
Input constant P section (larger angles)
")
45
Constant P section – after 3D WEREM (larger angles)
")
46
Werem - conclusions Very efficient when the main assumptions are met: strongest multiples are water-layer multiples and peg-legs and the sea-floor is simple Very fast - each predicted p trace is simply obtained as a sum of time-delayed input traces with the same p from the neighbour CMPs

47
WE for irregular sea-floor
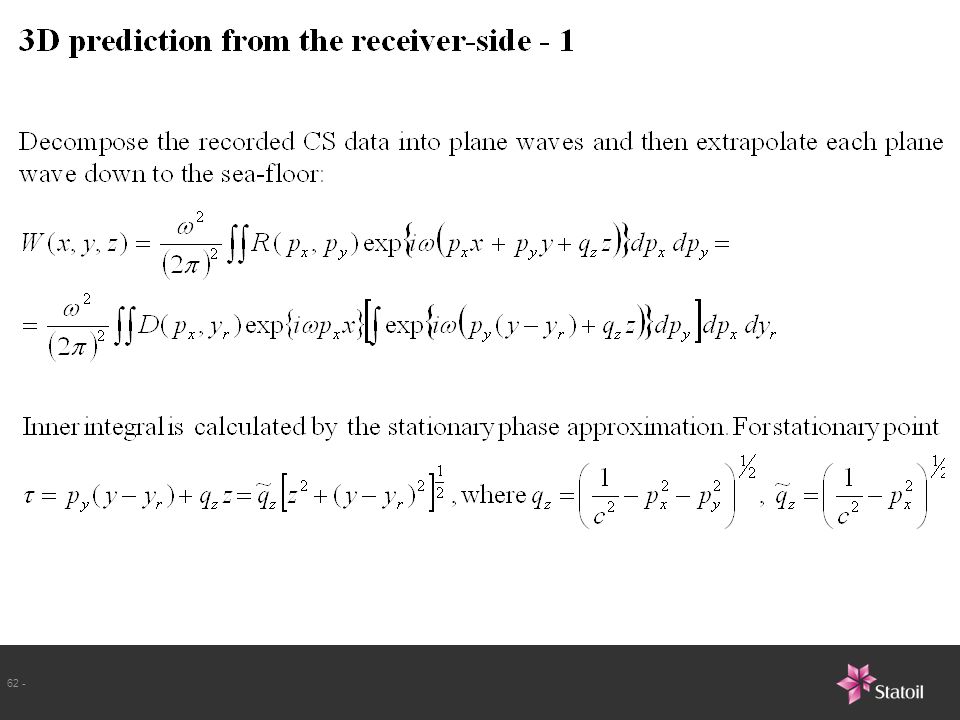
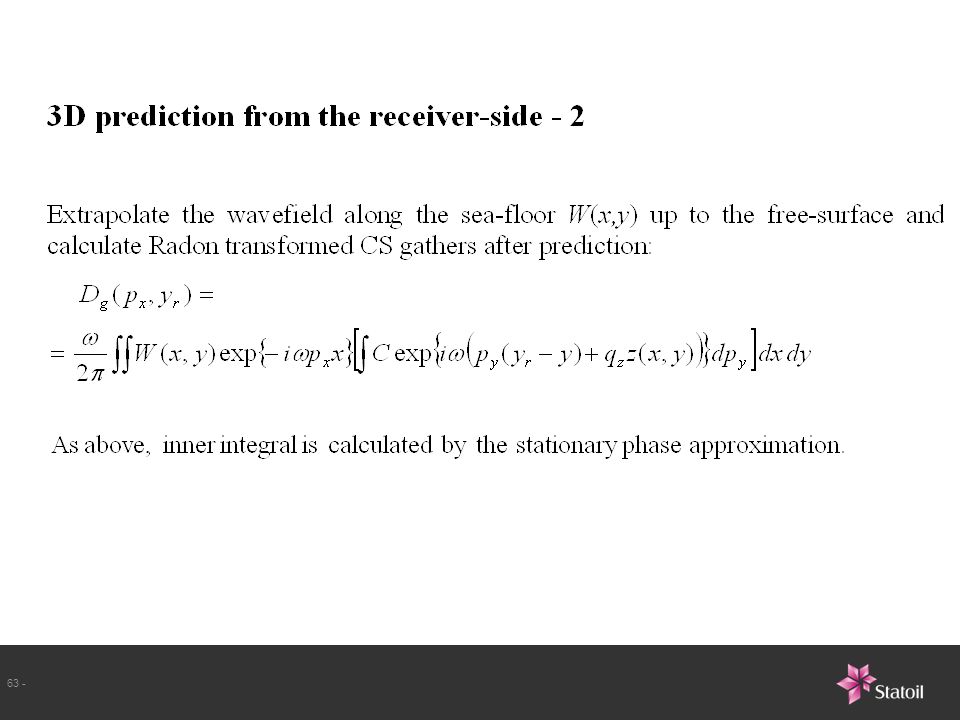
Kinematic prediction of multiples (extrapolation through the water layer) takes into account coupling between incident and reflected / scattered plane waves with different slownesses Both multiple reflections and diffractions are predicted The procedure starts from the Radon transformed CS gathers (no interleaving is required) In 3D exact prediction from the receiver side; approximate prediction from the source side
 takes into account coupling between incident and reflected / scattered plane waves with different slownesses. Both multiple reflections and diffractions are predicted. The procedure starts from the Radon transformed CS gathers (no interleaving is required) In 3D exact prediction from the receiver side; approximate prediction from the source side.")
48
2D prediction of multiples from the receiver side for irregular sea-floor

49
2D prediction of multiples from the source side for irregular sea-floor

50
Velocity model for FD modelling

51
Input P-section (zero angle) Receiver-side prediction
 Receiver-side prediction")
52
Input P-section (zero angle) Receiver-side prediction
 Receiver-side prediction")
53
Input P-section (20 degrees) Receiver-side prediction Source-side prediction
 Receiver-side prediction Source-side prediction")
54
Input CS gather After prediction + subtraction

55
Input CS gather After prediction + subtraction

56
Raw stack with final velocity / mute libraries

57
Stack after WE + VF

58
Raw CMP (no AGC) CMP after WE + VF (no AGC)
 CMP after WE + VF (no AGC)")
59
Input Constant P section R-side prediction

60
Input Constant P section R-side prediction

61
Input Constant P section After adaptive subtraction

64
Model for 3D ray tracing of primaries and sea-floor multiples

65
primary peg-legs Modelled CS gathers

66
Radon transformed CS gathers

67
Constant P sections (small angle) for line with crossline offset 250m.
Input D prediction D prediction

68
Constant P sections (larger angle) for line with crossline offset 250m.
Input D prediction D prediction

69
Constant P sections (small angle) for line with crossline offset 250m.
Input quasi 3D prediction D prediction

70
Constant P sections (larger angle) for line with crossline offset 250m.
Input quasi 3D prediction D prediction

71
WE for irregular sea-floor
Both multiple reflections and diffractions are predicted Exact 3D prediction of pure water-layer multiples and peg-legs from the receiver-side Quasi 3D prediction of peg-legs from the the source side 3-5 times slower than WEREM

72
Conclusions SRME is the method of preference for data from areas with deep sea-floor, especially when a thick package of strong reflectors is present below the sea-floor As a rule the method becomes less efficient when several orders of multiples are involved For such data we use the wave-equation schemes, especially when the main free-surface multiples are just water-layer multiples and peg-legs The 3D WE approach has fewer sampling problems than 3D SRME and it allows us to use different WE extrapolation schemes for different complexities of sea-floor and structure below it

73
Thank you

Similar presentations







 1 Reflector.>")












 transformation Spatial Fourier (x k x ) transformation applications f-k x transformation Radon (-p x ) transformation.>")
