Download presentation
Presentation is loading. Please wait.

1
Wensheng Zhang and Guohong Cao

2
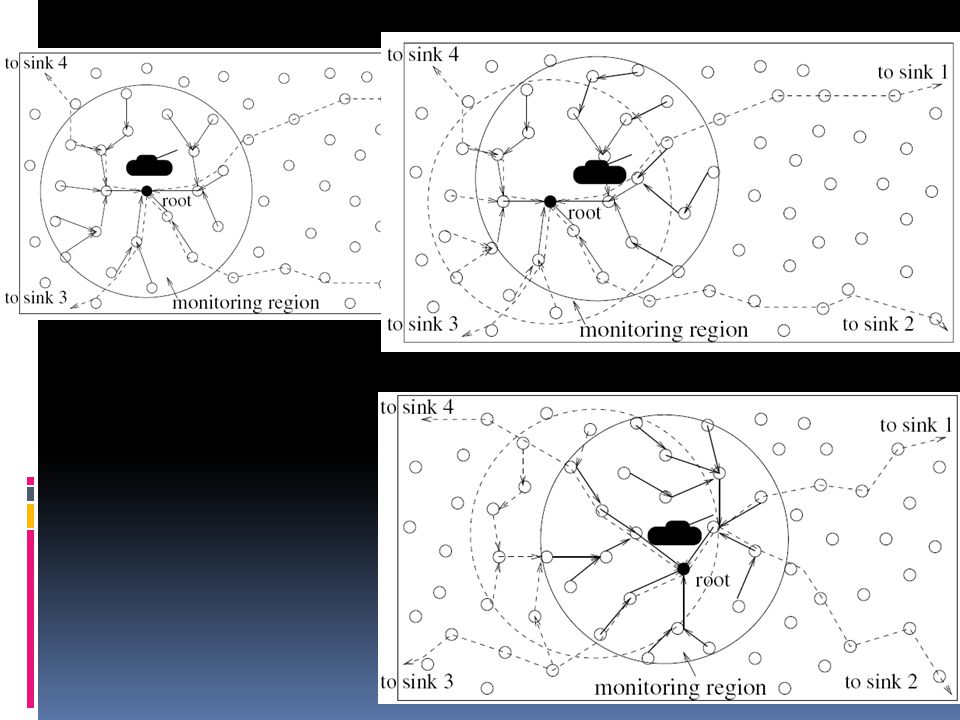
Dynamic Convoy Tree-based Collaboration (DCTC) 1. Constructing the Initial Convoy Tree Apply existing root election algorithm Other node connect to a neighbor closest to the root 2. Collecting sensing data via the tree Root receives reports and processes them 3. Tree expansion and pruning Apply existing prediction schemes to involve new nodes Prune useless nodes (too far from the target) Change the root node The root node makes all decisions
 Change the root node The root node makes all decisions.")
4
Energy consumption E = E d + E t (for each time interval) E d : Data collection E t : Tree reconfiguration Min-cost tree Problem of Optimizing Tree Reconfiguration Equal to Find a min-cost convoy tree sequence
 E d : Data collection E t : Tree reconfiguration Min-cost tree Problem of Optimizing Tree Reconfiguration Equal to Find a min-cost convoy tree sequence")
5
Optimizing Tree Reconfiguration Schemes A convoy tree is reconfigured in two steps 1. The current root is replaced by a new one 2. The remaining part of the tree is reconfigured to reduce the communication overhead

6
Root Replacement R predicts L t+1 Replace R, if D R, Lt+1 > d r d r Large: high overhead on data collection Small: high overhead on tree reconfiguration How to determine d r ?

7
k(v) = d r / v time units a target needs to travel through d r Nodes send reports to Root on every time unit The average energy consumption between two root replacement:
 = d r / v time units a target needs to travel through d r Nodes send reports to Root on every time unit The average energy consumption between two root replacement:")
8
Optimized Complete Reconfiguration (OCR) The current root decides and initiates root replacement New root notifies all nodes this change. Reconfigure the tree: Each node connects to the neighbor closest to the new root node.

9
OCR overhead analysis Data collection energy: Tree reconfiguration energy:

11
Optimized Interception-based Reconfiguration (OIR) The current root decides and initiates root replacement New root notifies all nodes this change. Reconfigure the tree: Each node checks whether it needs to change its parent node.

13
OIR overhead analysis

14
OCR vs OIR OCR:Higher priority on Data Collection OIR: Higher priority on Tree Reconfiguration High target velocity, small s d /s c, small d s /d

15
ThanksQ&A

Similar presentations