Download presentation
Presentation is loading. Please wait.

1
Visibility Graph Team 10 NakWon Lee, Dongwoo Kim

2
Robot Motion Planning

4
Configuration Space

5
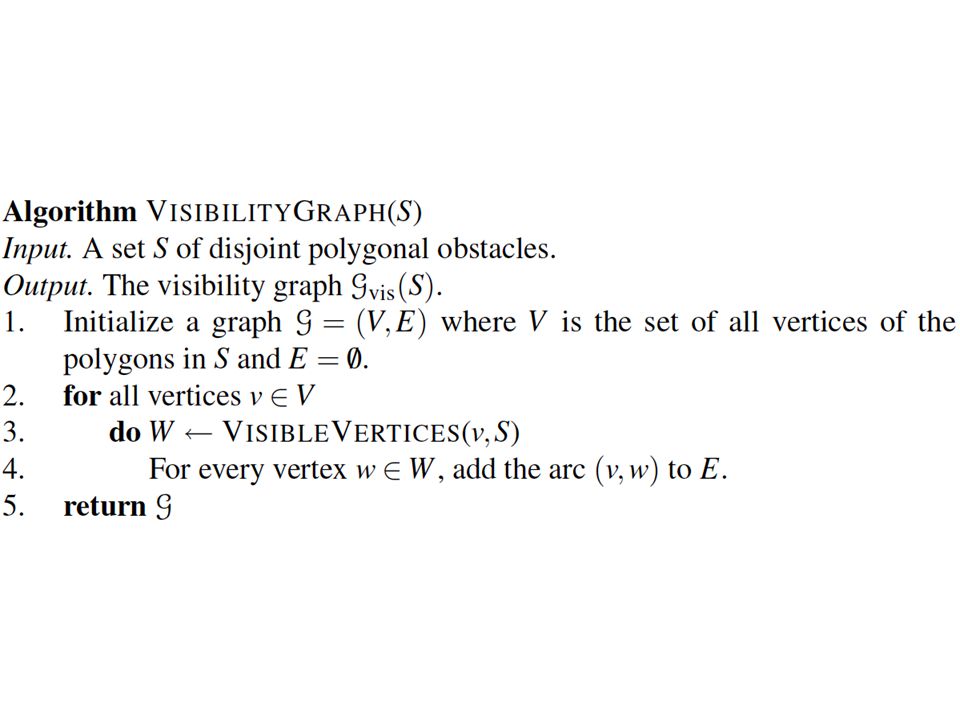
Shortest Paths

7
Shortest path in road map is not a real shortest path because some arcs are btw nodes that are far apart, whereas others are btw nodes that are close to each other. It is just minimum number of hop. To improve this problem, give each arc a weight corresponding to the Euclidean length, and use graph search algorithm that find the shortest path in a weighted graph. Dijkstra's algorithm But, it is still not a shortest path.

8
Shortest Paths Think of this path as an elastic rubber band. Fix the endpoints at the start and goal position. Try to tighten the rubber band. It will be stopped by the obstacles. The new path will follow parts of the obstacle boundaries and straight line segments through open space.

9
Shortest Paths

12
short cut

13
Shortest Paths

17
Visibility Graph Definition: The visibility graph of s and t and the obstacle set is a graph whose vertices are s and t the obstacle vertices, and vertices v and w are joined by an edge if v and w are either mutually visible or if (v, w) is an edge of some obstacle.
 is an edge of some obstacle.")
18
Visibility Graph

20
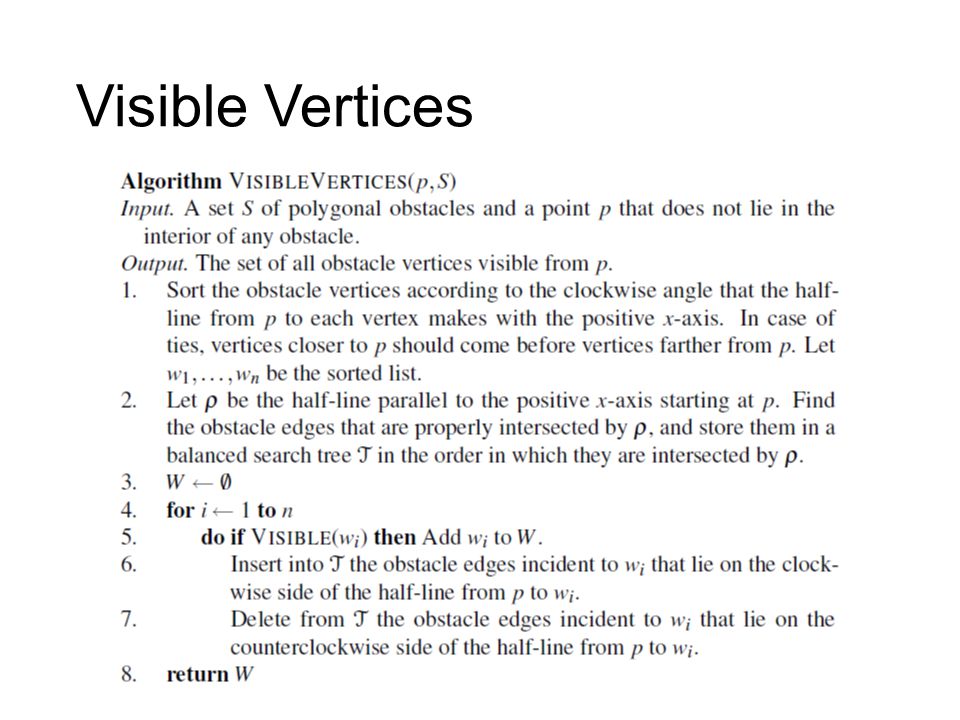
Visible Vertices

22
Visible Definition Two points p and q are mutually visible if the open line segment joining them doesn't intersect the interior of any obstacle.

24
Search Tree

25
Computing the Visibility Graph

29
The question is what are the significant event points, and what happens with each event?

30
Computing the Visibility Graph

31
event

32
Computing the Visibility Graph

33
Dual Arrangement Dual of point D Dual of point C x-coordinate is the slope of dual segment

34
Find Events

35
Angular order By using topological plane sweep, event do not need to be sorted.

36
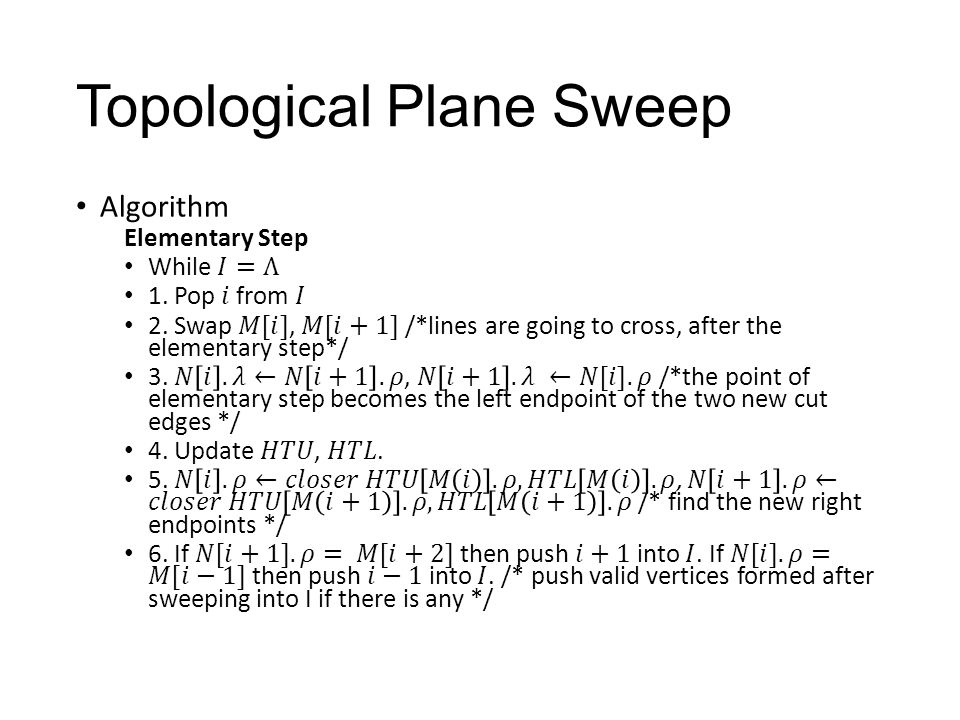
Topological Plane Sweep

37
Upper horizon tree Lower horizon tree

38
Topological Plane Sweep

42
What Happens at Each Event

43
Possible scenarios

44
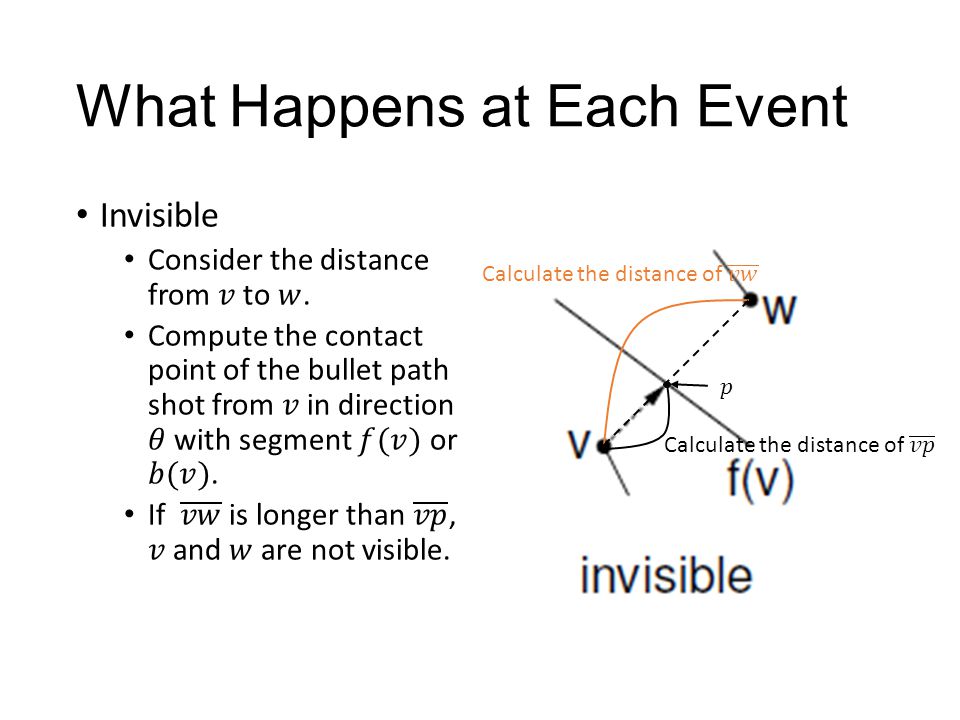
What Happens at Each Event

48
Thank You Q&A

Similar presentations


















, Nandan Kumar Dubey(Y6279), Vishal Agrawal(Y6541)>")













