Download presentation
Presentation is loading. Please wait.

1
Sorce: Suggestive Contours for Conveying Shape. (SIGGRAPH 2003) Doug DeCarlo, Adam Finkelstein, Szymon Rusinkiewicz, Anthony Santella. 1 Suggestive Contours for Conveying Shape CS 174 Robert Li May 24, 2004
 Doug DeCarlo, Adam Finkelstein, Szymon Rusinkiewicz, Anthony Santella. 1 Suggestive Contours for Conveying Shape CS 174 Robert Li May 24,")
2
Contours Contour Generator = all p s.t. n(p)٠v(p) = 0 set of points on the surface such that the unit surface normal is perpendicular to the view vector. Contour = The visible portions of the contour generator projected onto the image plane S = a smooth closed surface n(p) = unit surface normal at p v(p) = c - p, the view vector p = a point on S c = the camera
٠v(p) = 0 set of points on the surface such that the unit surface normal is perpendicular to the view vector. Contour = The visible portions of the contour generator projected onto the image plane S = a smooth closed surface n(p) = unit surface normal at p v(p) = c - p, the view vector p = a point on S c = the camera.")
3
Curvature The curvature k(p) = The reciprocal of the radius of the circle that best approximates the curve at p. The radial plane = Plane defined by the vectors n, w and the point p. The radial curve = The set of points in S intersect the radial plane. w = The un-normalized projection of v onto the tangent plane at p w = The projection of v onto the tangent plane.

4
Suggestive Contours Definition I Suggestive Contour Generator (I): The set of points on the surface at which its radial curvature k r is 0, and the directional derivative of k r in the direction of w is positive: D w k r > 0
: The set of points on the surface at which its radial curvature k r is 0, and the directional derivative of k r in the direction of w is positive: D w k r > 0")
5
Equivalent Definitions Definition II and III Suggestive Contour Generator (II) = The set of minima of n ٠ v in the direction of w. ► Suggestive Contour Generator (III) The set of points on the contour generator of a nearby viewpoint (of radial distance less than 90 degrees) that are not in radial correspondence with points on the contour generators of any (radially) closer viewpoint ► Additionally
 The set of points on the contour generator of a nearby viewpoint (of radial distance less than 90 degrees) that are not in radial correspondence with points on the contour generators of any (radially) closer viewpoint ► Additionally.")
6
Object Space Algorithm Test each triangle for two vertices whose sign of n dot v is different. Interpolate to get the zero crossing (Hertzmann zero crossing algorithm for smooth surfaces) Find k r (p) = k 1 (p) cos 2 Φ+ k 2 (p) sin 2 Φ for each point. k 1 and k 2 are the principle curvatures of the face and Φ is the angle between w(p) and the principle curvature direction corresponding to k 1 Find the zeros of k r (p) using the zero crossing algorithm These should be loops on the surface Calculate D w k r and make sure it is positive Handle numerical errors
 Find k r (p) = k 1 (p) cos 2 Φ+ k 2 (p) sin 2 Φ for each point. k 1 and k 2 are the principle curvatures of the face and Φ is the angle between w(p) and the principle curvature direction corresponding to k 1 Find the zeros of k r (p) using the zero crossing algorithm These should be loops on the surface Calculate D w k r and make sure it is positive Handle numerical errors.")
7
Image Space Algorithm Approximate n ٠ v by placing a diffuse light source at the camera origin. Search image for valleys in intensity by finding stable minima of (n ٠ v) /||v|| : For pixel i with intensity p i, define the pixel of the greatest intensity in a radius r around p i to be p max. For pixel i with intensity p i, define the pixel of the greatest intensity in a radius r around p i to be p max. Label i a valley if two conditions are met: no more than a certain percentage s of the pixels in this disk are strictly darker than p i ; and p max - p i exceeds a fixed threshold d. Label i a valley if two conditions are met: no more than a certain percentage s of the pixels in this disk are strictly darker than p i ; and p max - p i exceeds a fixed threshold d. Remove small irregularities with a median filter of radius r.
 /||v|| : For pixel i with intensity p i, define the pixel of the greatest intensity in a radius r around p i to be p max. For pixel i with intensity p i, define the pixel of the greatest intensity in a radius r around p i to be p max. Label i a valley if two conditions are met: no more than a certain percentage s of the pixels in this disk are strictly darker than p i ; and p max - p i exceeds a fixed threshold d. Label i a valley if two conditions are met: no more than a certain percentage s of the pixels in this disk are strictly darker than p i ; and p max - p i exceeds a fixed threshold d. Remove small irregularities with a median filter of radius r..")
8
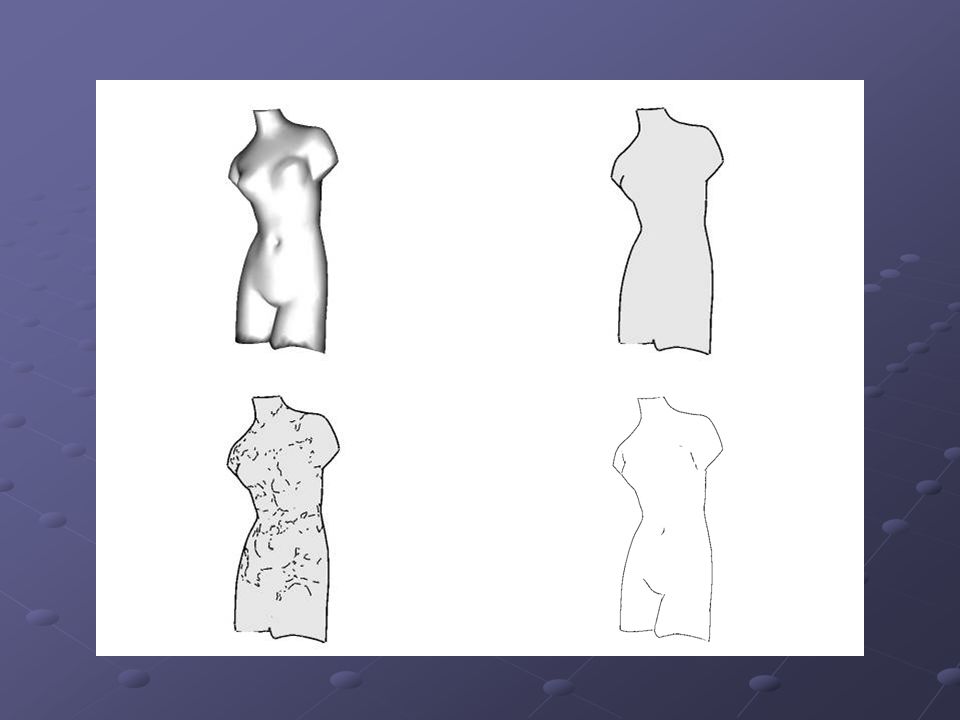
Results from Paper Contours image space object space

9
My Results

10
Comparison

15
Comparison Between Algorithms Image: Slower Slower Good results Good results Very easy to implement - < 50 lines of code Very easy to implement - < 50 lines of codeObject: Faster Faster Theoretically better results Theoretically better results Much harder to implement – several hundred lines of code Much harder to implement – several hundred lines of code

16
Future Directions Improve object space algorithm. Need less parameters. Implement algorithms on the GPU by using vertex and pixel shaders. Work better with smooth surfaces

Similar presentations











 that are visible, given a.>")







>")


