Download presentation
Presentation is loading. Please wait.

1
ASSIMILATION OF SATELLITE TRACER DATA AND OPTIMISATION USING SELF-CONSISTENCY DIAGNOSTICS Saad Rharmili, Slimane Bekki, SA-IPSL, CNRS/UPMC

2
Assimilation of MLS O3 data in MIMOSA High resolution isentropic transport model (there is another version of the model with chemistry) . Forced with meteorological analysis (ECMWF, NCEP) Sequential assimilation of tracer observations (MLS O3) Assimilation window (6h): observations advected forward and backward to the assimilation time.
 Sequential assimilation of tracer observations (MLS O3) Assimilation window (6h): observations advected forward and backward to the assimilation time..")
3
Frequency of MLS observations 1 day (about 1000 profiles) 10 days
 10 days")
4
Initial stateAnalysis model Observations model MIMOSA Sequential assimilation scheme

5
Kalman Filter M : Model operator Q : covariance matrix of model errors (adjust model error growth) Analysis: Analysis Error : Time evolution of state vector and background errors: Innovation Forecast H : interpolation operator K : gain matrix B t : covariance matrix of background errors (adjust correlation lengths) O : covariance matrix of observation errors (adjust representativeness errors)
 Analysis: Analysis Error : Time evolution of state vector and background errors: Innovation Forecast H : interpolation operator K : gain matrix B t : covariance matrix of background errors (adjust correlation lengths) O : covariance matrix of observation errors (adjust representativeness errors)")
6
Parameterisation of the model error growth and of the representativeness error b ii : diagonal elements of B Covariance matrix of observation errors (assumed diagonal) Time evolution of background error: Gain matrix: Parameter 1 : t 0 (model error growth) Parameter 2 : r 0 (representativeness error)
 Time evolution of background error: Gain matrix: Parameter 1 : t 0 (model error growth) Parameter 2 : r 0 (representativeness error)")
7
Parameterisation of correlation function Non-diagonal elements of B: Correlation function = f(distance) f ij correlation function between points i and j Parameter 3 : D 0, (distance correlation length)
 f ij correlation function between points i and j Parameter 3 : D 0, (distance correlation length)")
8
RESIDU D’ASSIMILATION: VECTEUR INNOVATION ~ 0 (si coherent) Covariance du vecteur innovation: si coherent
 Covariance du vecteur innovation: si coherent")
9
COHERENCE INTERNE: TEST DE X 2 Erreurs a posteriori Erreurs a priori si coherent

10
AUTRES RESIDUS D’ASSIMILATION

11
Diagnostique d’erreur de prévision Diagnostique d’erreur d’observation AUTRES TESTS DE COHERENCE INTERNE

12
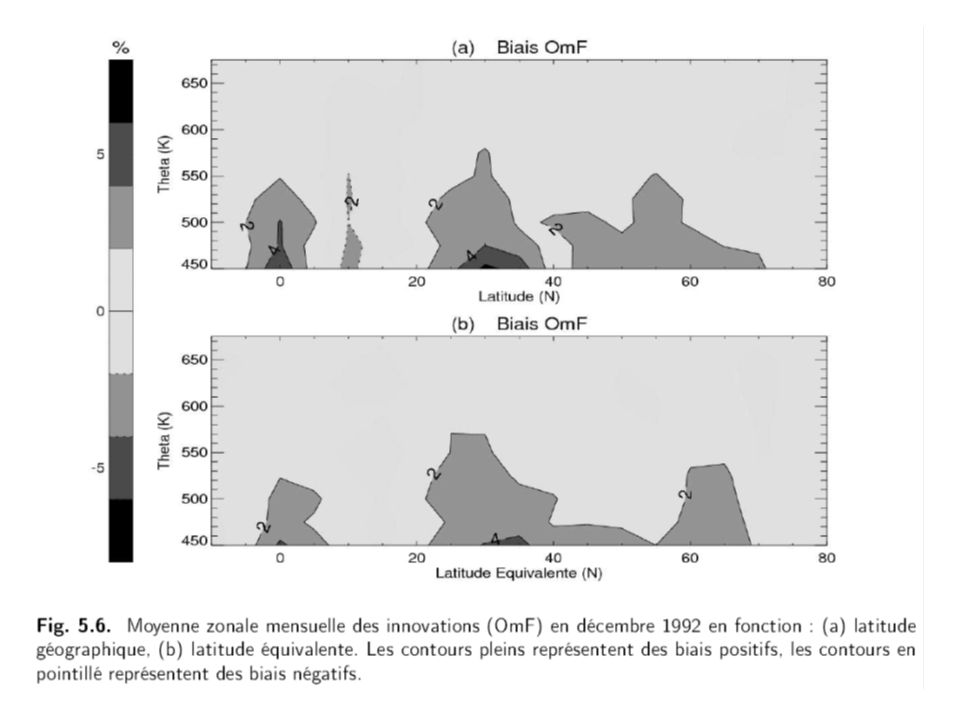
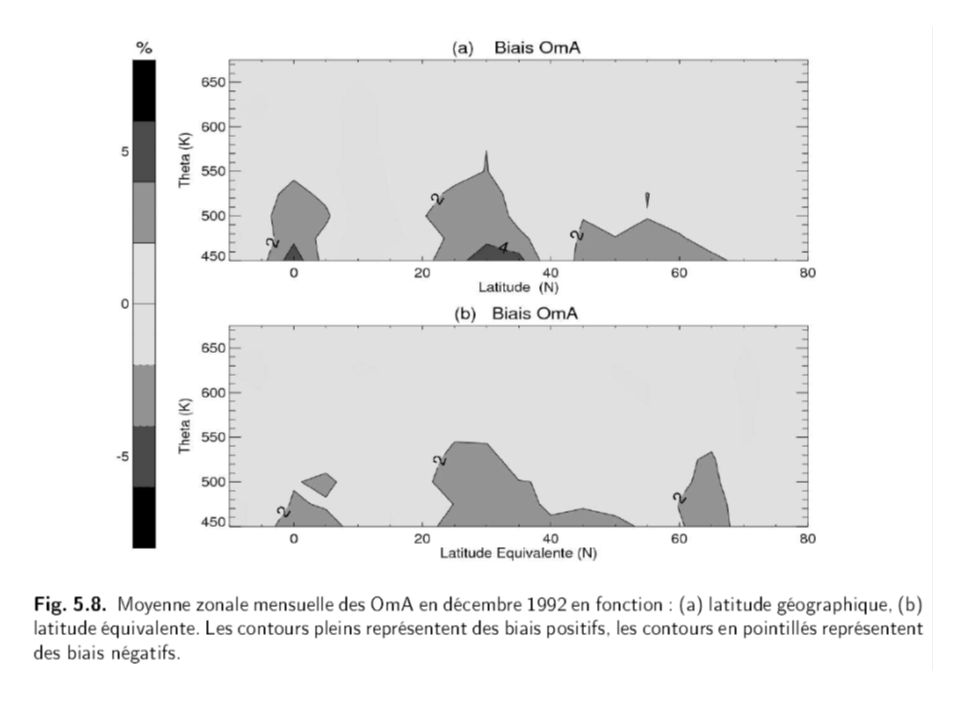
Optimisation of the assimilation system according to two diagnostics RMS(OmF) Self-consistency test: OmF versus a-priori errors O and B Assimilation of MLS data (about 1000 profiles/day) into MIMOSA for several isentropic levels between 400 and 900K from 15 to 25/08/93 -> Recherche des paramètres optimums to, ro and Do par minimisation RMS( OmF) et/ou (X 2 /p -1).
 Self-consistency test: OmF versus a-priori errors O and B Assimilation of MLS data (about 1000 profiles/day) into MIMOSA for several isentropic levels between 400 and 900K from 15 to 25/08/93 -> Recherche des paramètres optimums to, ro and Do par minimisation RMS( OmF) et/ou (X 2 /p -1).")
17
QUELQUES RESULTATS DE MINIMISATION RMS(OmF) minimum et/ou (X 2 /p – 1) minimum -> to, ro et Do varient
 minimum et/ou (X 2 /p – 1) minimum -> to, ro et Do varient")
18
MINIMISATION GLOBALE SOUS CONTRAINTE RMS(OmF) minimum avec X 2 /p=1 -> to, ro et Do varient
 minimum avec X 2 /p=1 -> to, ro et Do varient")
19
2 GROS PROBLEMES 1/ X 2 < 1 2/ Do = f(frequence des obs.) determiner Do (indépendant de to et ro)
 determiner Do (indépendant de to et ro)")
21
RMS(OmF) minimum avec X 2 /p=1 -> to, ro et Do varient Erreurs de mesure expérimentale et de représentativité sont modélisées même paramètre:
 minimum avec X 2 /p=1 -> to, ro et Do varient Erreurs de mesure expérimentale et de représentativité sont modélisées même paramètre:")
22
2 GROS PROBLEMES 1/ X 2 < 1 2/ Do (correlation) = f(frequence des obs.) determiner Do (indépendant de to et ro)
 = f(frequence des obs.) determiner Do (indépendant de to et ro)")
23
METHODE NMC: LONGUEUR DE CORRELATION

24
MINIMISATION GLOBALE SOUS CONTRAINTE RMS(OmF) minimum avec Xo 2 /p et Xf 2 /p =1 -> to et ro (Do fixe)
 minimum avec Xo 2 /p et Xf 2 /p =1 -> to et ro (Do fixe)")
27
CONCLUSIONS

Similar presentations
















 Presentation.>")


 : Preliminary tests over the Ile de France region 2.>")






>")

 Shu-Chih Yang (with EK)>")

