Download presentation
Presentation is loading. Please wait.

1
Biometrics & Security Tutorial 9

2
1 (a) What is palmprint and palmprint authentication? (P10: 9-10)
 What is palmprint and palmprint authentication (P10: 9-10)")
4
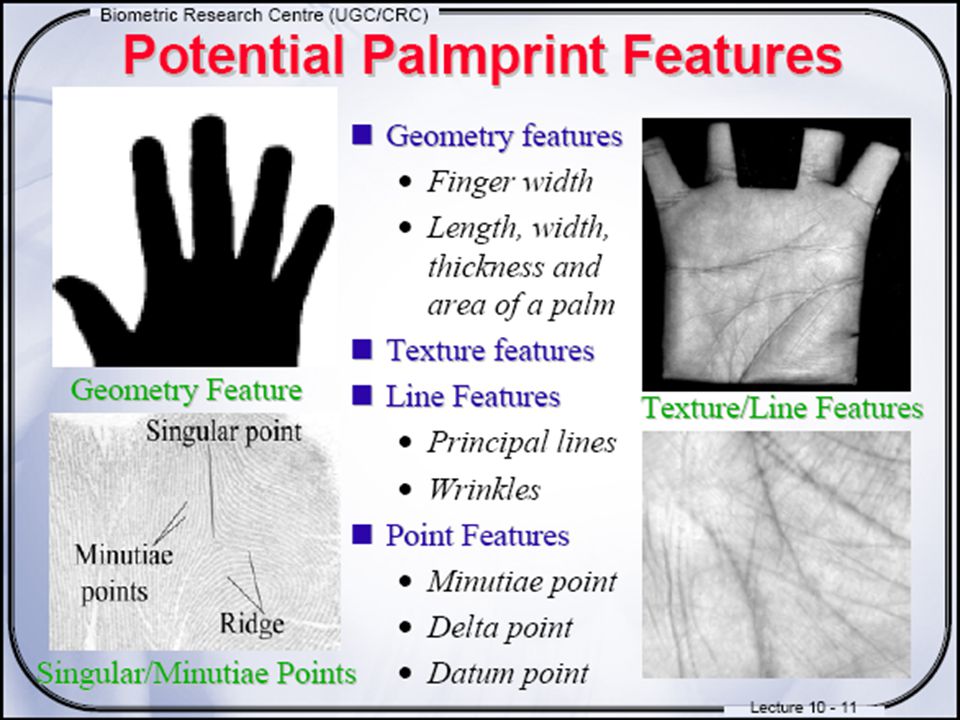
1 (b) What kinds of features can be extracted from a palm? (P10:11)
 What kinds of features can be extracted from a palm (P10:11)")
6
1 (c) How to get Datum Point in P10: 14?
 How to get Datum Point in P10: 14")
10
50 10 100 10 50 150 30 300

11
1 (d) Given two lines in a palmprint image, please explain how to get their Euclidean distance (P10: 21). If we mark each line as orientation features, how to understand their matching score: S(C1, C2) in P10:33?
 in P10:33 .")
15
C1=[1 0 1 0] C2=[0 1 0 1] C3=[1 0 1 0] N=4 H(C1,C2)=4 S(C1,C2)=0 H(C1,C3)=0 S(C1,C3)=1
![C1=[ ] C2=[ ] C3=[ ] N=4 H(C1,C2)=4 S(C1,C2)=0 H(C1,C3)=0 S(C1,C3)=1](http://images.slideplayer.com/12/3386793/slides/slide_15.jpg "C1=[ ] C2=[ ] C3=[ ] N=4 H(C1,C2)=4 S(C1,C2)=0 H(C1,C3)=0 S(C1,C3)=1")
16
1 (e) What are the advantages and disadvantages of palmprint recognition? (P10: 58)
 What are the advantages and disadvantages of palmprint recognition (P10: 58)")
18
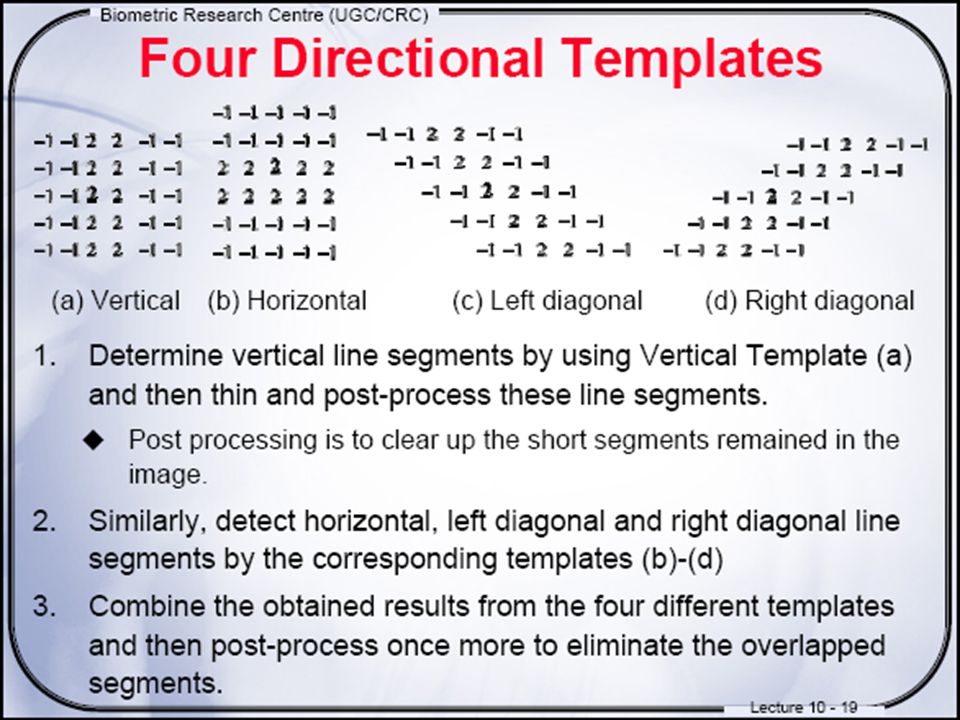
2. In line feature based offline palmprint recognition, four different directional templates are defined. Please try to explain why they can detect the corresponding directional line segments (See P10:19). Can you design another set of four different directional templates to determine line segments?
. Can you design another set of four different directional templates to determine line segments .")
20
A line segment 10 90 10 90 10 90 10 90 10 Its cross-section 10 90 10 Our line detector Its cross-section 121 The inner product of two vectors increases with their similarity !

21
Line detector Zero sum Similar cross-section to a line segment Larger than a line segment The better similarity, the better detection How many directions we need? The more directions, the more accuracy, the less efficiency A tradeoff is made according to experience

22
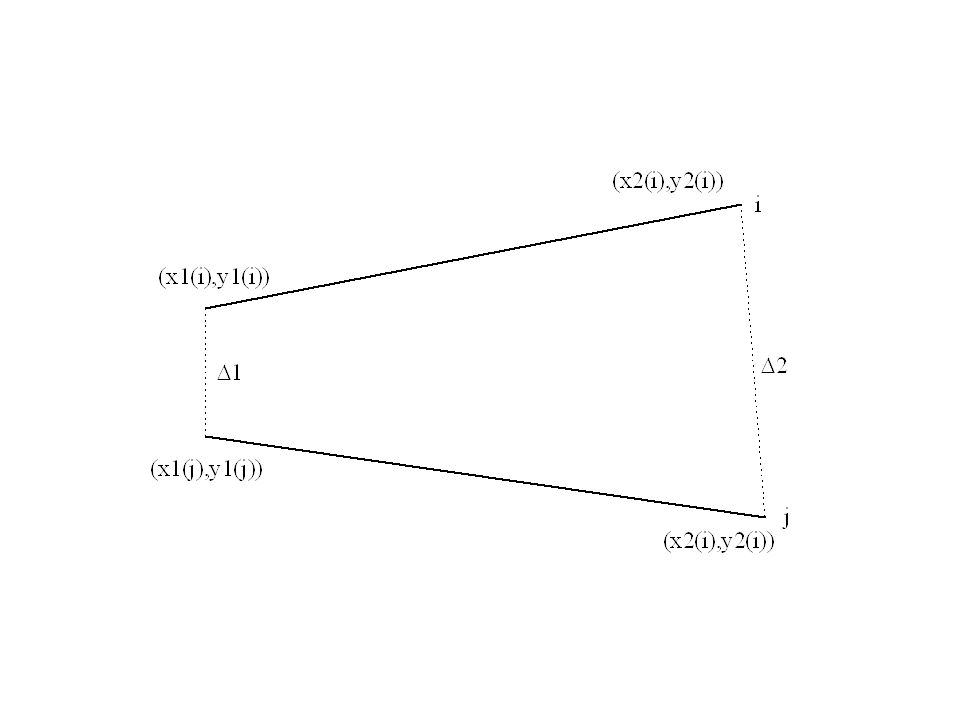
3. In P10:28-29, a segmentation approach, Tangent Points of the Finger Hole, is introduced. The line passing though the two points, (x1, y1) and (x2, y2), satisfies the inequality, for all i and j. Please understand this method and check the determinant rule.
 and (x2, y2), satisfies the inequality, for all i and j. Please understand this method and check the determinant rule..")
25
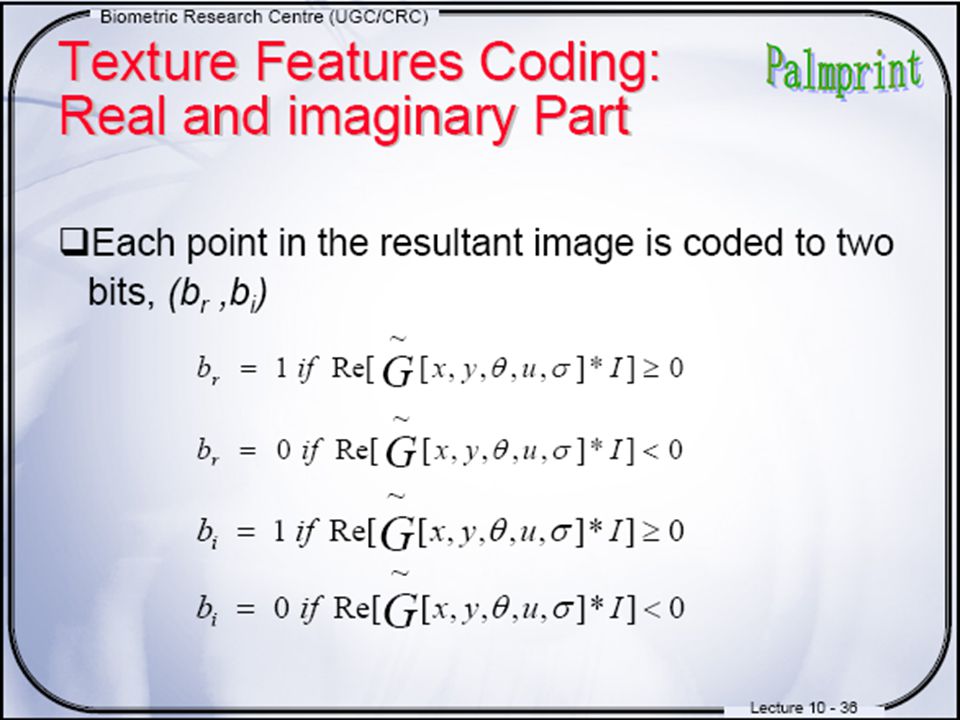
4. Assume that there is a Palmprint Code with 256 bytes by using texture feature. Please compute the number of features represented by the Palmprint Code (See P10:36). (256 * 8 / 2 == 1,024)
. (256 * 8 / 2 == 1,024).")
29
Tut 7, 2. There are four steps in the Daugman’s approach (P8: 32-36). The third step generates IrisCode with 512 bytes. If 2 bits represent a feature, please compute the total number of features. (512*(8/2)=2,048)
=2,048).")
31
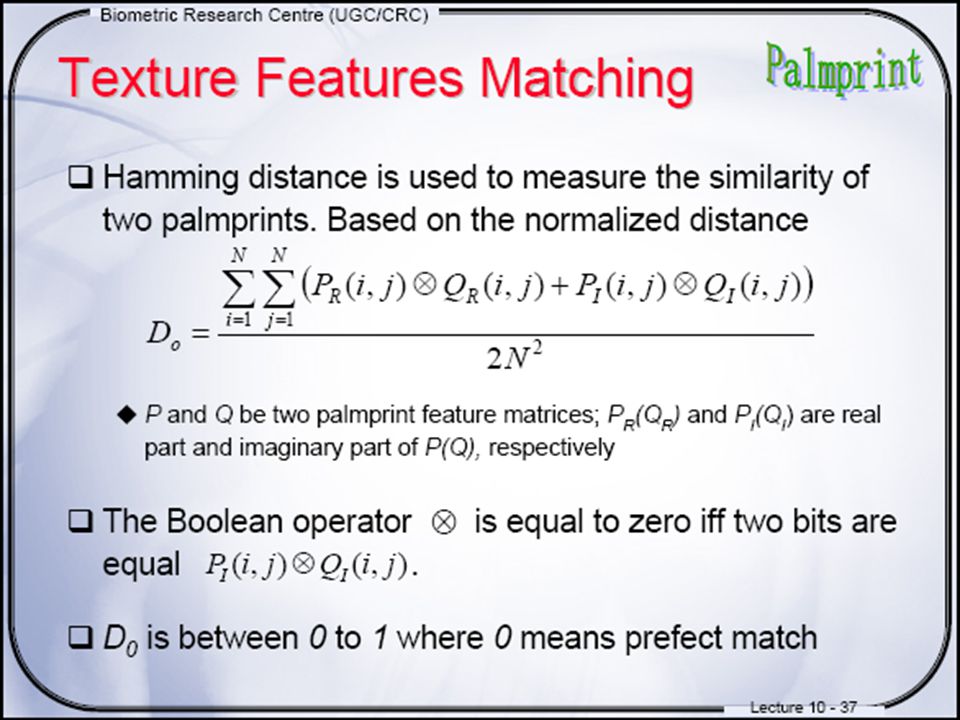
5. In texture features matching stage, hamming distance is used to measure the similarity of two palmprints, as shown in P10:37. What conclusion can you get from the normalized distance D 0 ? Hint: Consider the normalized distance with the experimental results in P10:38. (The smaller in the normalized distance, the closer in two palmprints)
.")
35
C1=[1 0 1 0] C2=[0 1 0 1] C3=[1 0 1 0] N=4 H(C1,C2)=4 S(C1,C2)=0 H(C1,C3)=0 S(C1,C3)=1
![C1=[ ] C2=[ ] C3=[ ] N=4 H(C1,C2)=4 S(C1,C2)=0 H(C1,C3)=0 S(C1,C3)=1](http://images.slideplayer.com/12/3386793/slides/slide_35.jpg "C1=[ ] C2=[ ] C3=[ ] N=4 H(C1,C2)=4 S(C1,C2)=0 H(C1,C3)=0 S(C1,C3)=1")
36
N=3 D 0 = 0.11

Similar presentations
















 Reporter :鄒嘉恆 Date : 10/06/2009.>")
 What is the scatter matrix (P4: 21)? Understand what about eigenvector and eigenvalue as well as their functions?>")











 Understand two stages (Enrollment and Authentication) in a fingerprint system. (P6: 12)>")
 Please compare two different kinds of biometrics technologies: Retina and Iris. (P8:2-3)>")


