Download presentation
Presentation is loading. Please wait.

1
Plane Kinematics of Rigid Bodies
study of body motion without reference to force. Rigid Body It has dimensions. (particle doesn’t have it). distance between 2 points in the body remains unchanged. assumption validity? i.e. there is no real rigid body. Plane Motion Definition: All parts of the body move in parallel planes.
. distance between 2 points in the body remains unchanged. assumption validity i.e. there is no real rigid body. Plane Motion. Definition: All parts of the body move in parallel planes.")
2
Treat the body as thin slab object.
Plane Motion Definition: All parts (points) of the body move in parallel planes. Movement of one cutting face (corresponding to its motion plane) describes movement of the whole body. Motion Plane Treat the body as thin slab object. Any slab object (cutting face) is okay, But we usually use the plane where the object’s C.G.is in. C.G. All corresponding points in other motion plane have the same velocity and acceleration
 of the body move in parallel planes. Movement of one cutting face (corresponding to its motion plane) describes movement of the whole body. Motion Plane. Treat the body as thin slab object. Any slab object (cutting face) is okay, But we usually use the plane where the object’s C.G.is in. C.G. All corresponding points in other motion plane. have the same velocity and acceleration.")
4
Rigid-Body Plane Motion
(Pure) Translation II (Pure) Rotation III General Motion
 Translation. II. (Pure) Rotation. III. General Motion.")
5
Type of Plane motion (Pure) Translation
C.G. (Pure) Translation Definition: A line between two points in the body remains parallel through out the motion. Motion of one point can be used to describe motion of the whole body. Rectilinear Translation Curvilinear Translation C.G. Treat it as a particle
 Translation. Definition: A line between two points in the body remains parallel through out the motion. Motion of one point can be used to describe motion of the whole body. Rectilinear. Translation. Curvilinear. Translation. C.G. Treat it as a particle.")
6
Types of Plane Motions (cont.)
Fixed-axis (Pure) Rotation: All , move along circular path with center at Not having the same velocity and acceleration (depends on circle radius r) Use techniques for particle (circular) motion (n-t, r-) Important Property of Fixed-Axis Rotation Rotation axis motion plane Rotation Axis Motion Plane
 Rotation: All , move along circular path with center at. Not having the same velocity and acceleration (depends on circle radius r) Use techniques for particle (circular) motion (n-t, r-) Important Property of Fixed-Axis Rotation. Rotation axis. motion plane. Rotation Axis. Motion Plane.")
7
Types of Plane Motions (cont.)
General Plane motion: need new techniques in this chapter

8
5/2 Rigid Body’s Rotation
Angle between any two lines on “rigid” object does not change during the time “Rotating” concept is basically a concept on rotation of “line”. same w,a? a concept on (whole) rigid body. a line b any Define angular position (+/-) + angular velocity angular acceleration any Reference Any lines on a rigid body in its plane of motion have the same angular displacement, velocity and acceleration for rigid body
 rigid body. a line. b. any. Define angular position (+/-) + angular velocity. angular acceleration. any Reference. Any lines on a rigid body in its plane of motion have the same angular displacement, velocity and acceleration. for rigid body.")
9
(a) Angular Motion Relations
Define angular position (+/-) any line angular velocity angular acceleration + any Reference Similar to rectilinear motion Sign convention of all variables must be consistent!
 any line. angular velocity. angular acceleration. + any Reference. Similar to rectilinear motion. Sign convention of all variables must be consistent!")
10
Angular Motion Relations
Observed the similarity with the linear motion 2) Graphical meanings 1) Integrals Calculation
 Graphical meanings. 1) Integrals Calculation.")
11
CCW:+ a=4t a=4t a=4t w = - 60p w = 0 w= A flywheel rotating freely at 1800 rev/min clockwise is subjected to a variable counterclockwise torque which is first applied at time t = 0. The torque produces a counterclockwise angular acceleration = 4t rad/ss, Determine the total number of revolutions, clockwise plus counterclockwise, turned by the flywheel during the first 14 seconds of torque application. +

13
Fixed-Axis (Pure) Rotation (scalar notation)
Can we find? rw P Rigid body points rww whole body (rigid body) ra O Point P w a n-t coord: Fixed-Axis (Pure) Rotation Only !
 ra. O. Point P. w. a. n-t coord: Fixed-Axis. (Pure) Rotation Only !")
14
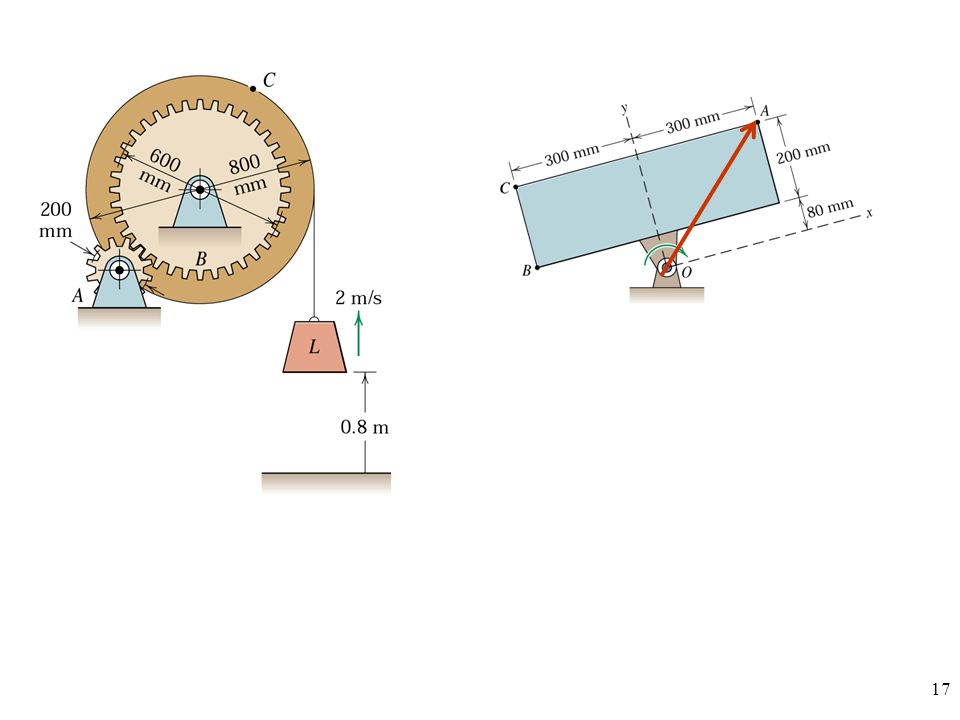
(a) the acceleration of point C on the cable in contact with the drum
The pinion A of the hoist motor drives gear B, which is attached to the the hoisting drum. The load L is lifted from its rest position and acquires an upward velocity of 2 m/s in a vertical rise of 0.8 m with constant acceleration. As the load passes this position, compute (a) the acceleration of point C on the cable in contact with the drum (b) the angular velocity and angular acceleration of the pinion A. w,a CCW CCW
 the acceleration of point C on the cable in contact with the drum. (b) the angular velocity and angular acceleration of the pinion A. w,a. CCW. CCW.")
15
n n t t = 0 = 0 share the same share the same Non-slipping
floor- fixed Non-slipping Non-slipping share the same = 0 share the same Why? = 0 Without gear teeth, the ball is not guaranteed to roll without slipping. Two possible motion: - roll without slipping - roll with slipping. If it do really roll without slipping, It should have some “motion constraint”. [ fixed relation between w and v ] (Next session: we will find out this) In case of No gear-teeth
 In case of No gear-teeth.")
18
Fixed-Axis (Pure) Rotation (vector notation)
The body rotating about the O axis Represent “angular velocity” w as Vector Direction: “Right-hand rule” From the last section, the magnitude of the velocity is Think in 3D Vector We consider only Plane motion of rigid body The cross product can be used to establish the direction:

19
Fixed Axis Rotation (vector notation)
Differentiating the velocity with respect to time: Direction depends on We consider only “Plane motion” of rigid body Direction:

20
Fixed-Axis (Pure) Rotation (vector notation)
 Rotation (vector notation)")
21
The rectangular plate rotates clockwise.
If edge BC has a constant angular velocity of 6 rad/s. Determine the vector expression of the velocity and acceleration of point A, using coordinate as given. Rigid body

23
Equations Review: (Pure) Translation
Movement of one point describes movement of the whole body. (Pure) Rotation rotation of one line describes rotation of the whole body. Whole body shares the same “angular” quantities. Reference + any line Absolute motion Relative motion General Plane Motion
 Rotation. rotation of one line describes rotation of the whole body. Whole body shares the same angular quantities. Reference. + any line. Absolute motion. Relative motion. General Plane Motion.")
24
5/3 Absolute Motion (of General Plane Motion)
Use geometric constraint (which define the configuration of the body) to obtain the velocity and acceleration (in general motion) Idea: write a (position) constraint equation which always applies regardless of the system’s configuration, then differentiate the equation to get velocity and acceleration. w? for complex constraint method of relative motion may be easier.
 to obtain the velocity and acceleration (in general motion) Idea: write a (position) constraint equation which always applies regardless of the system’s configuration, then differentiate the equation to get velocity and acceleration. w for complex constraint method of relative motion may be easier.")
25
Define the displacement and its positive direction.
w? Define the displacement and its positive direction. The variable must be measured from the fixed reference point or line. Find the equation of constraint motion. Equation must be true all during the motion. Differentiate it to find (angular) velocity and acceleration.
 velocity and acceleration.")
26
5/56. Express the angular velocity and angular acceleration of the connecting rod AB in terms of the crank angle for a given constant b

27
w SP5/4 A wheel of radius r rolls on a flat surface without slipping.
motion constraint SP5/4 A wheel of radius r rolls on a flat surface without slipping. Determine angular motion of the wheel in terms of the linear motion of its center O. Also determine the acceleration of a point on the rim of the wheel as the points comes into contact with the surface on which the wheel rolls w Point O: rectilinear motion Point C’s trajectory

28
SP5/4 A wheel of radius r rolls on a flat surface without slipping.
Determine angular motion of the wheel in terms of the linear motion of its center O. Also determine the acceleration of a point on the rim of the wheel as the points comes into contact with the surface on which the wheel rolls Not depend on a(t), w(t) are! velocity=0 Acceleration in the direction of axis x = 0 O D When Point D comes to contact the surface, It also has a velocity (=0), and acc. as above. C’’
, w(t) are! velocity=0. Acceleration in the. direction of axis x = 0. O. D. When Point D comes to contact the surface, It also has a velocity (=0), and. acc. as above. C’’")
29
velocity=0 No slipping Acceleration in the direction of axis x = 0 O O
Analogy No slipping Rel. vel. =0 Rel acc. = 0

30
Non-slipping Condition
floor- fixed

31
“no slipping” implies:
1) Contact point { C , C’ } on two body has no relative velocity. 2) Contact point { C, C’ } on two body has same tangential component of acceleration
 Contact point { C , C’ } on two body has no relative velocity. 2) Contact point { C, C’ } on two body has same tangential component of acceleration.")
32
O and L has same vertical velocity & acceleartion
Each cables do not slip. Load-supporting pulleys are rigid body. A B O O and L has same vertical velocity & acceleartion

35
General Plane Motion of Rigid Body
Introduction นิยามการเคลื่อนที่ของวัตถุเกร็ง Rotation วิธีอธิบายการเคลื่อนที่แบบหมุน - Calculation methods usually for any t using constraint equation Absolute motion ใช้คำนวณ V A Translating-only observer usually for some t (instant) using its geometric shape at that instant Relative velocity ใช้คำนวณ V Observer is at the point of rigid body where its velocity = 0 Instantaneous Center of Zero Velocity (ICZV) ใช้คำนวณ V Relative acceleration ใช้คำนวณ A V Motion relative to rotating axes Translating and rotating Observer ใช้คำนวณ V A
 using its geometric shape at that instant. Relative velocity. ใช้คำนวณ. V. Observer is at the point of rigid body where its velocity = 0. Instantaneous Center of. Zero Velocity (ICZV) ใช้คำนวณ. V. Relative acceleration. ใช้คำนวณ. A. V. Motion relative to. rotating axes. Translating and rotating. Observer. ใช้คำนวณ. V. A.")
36
5/4 Relative Velocity relative velocity concept
Different viewpoint General Plane Motion = Translation + Rotation “simultaneous” Motion of point (observer) B, detected by O = Motion of plate moving “translationally” Since the distant between the two points on a rigid body is constant, an observer at one point will see the other point move in a circular motion around it! Wait! B really sees A moving circularly? B sees A has no movement !?!?!? O
 B, detected by O. = Motion of plate moving translationally Since the distant between the two points on a rigid body is constant, an observer at one point will see the other point move in a circular motion around it! Wait! B really sees A moving circularly B sees A has no movement ! ! ! O.")
37
Applying the relative concept
Which one? Only this case Observer B is sitting on the magic carpet. Observer B is on the plate Rotating observer (attached to B) non-rotating observer (attached to B) Rotating frame non-rotating frame A A A B B B see A having a velocity perpendicular with its distance. B see A no moving at all
 non-rotating observer (attached to B) Rotating frame. non-rotating frame. A. A. A. B. B. B see A. having a velocity perpendicular with its distance. B see A no moving at all.")
38
Relative Velocity (non-rotating observer)
We use: non-rotating observer (frame) attached to B Absolute world: Relative world: same? Only when non-rotating observer (see next page) Observer at B see A moving in a circle around it Observer O detects: Observer B detects:
 attached to B. Absolute world: Relative world: same Only when. non-rotating observer. (see next page) Observer at B see A moving in a circle around it. Observer O detects: Observer B detects:")
39
Translating observer see same w,a as absolute Observer
The rotating of rigid body = The rotating of line compared with “fixed” reference axis same w same a B B’s reference line B O O’s reference line

40
Translating-Rotating observer sees different w,a with absolute Observer
The rotating of rigid body = The rotating of line compared with “fixed” reference axis different w different a B B’s reference line B The rotating B’s “reference line”, observed by absolute observer. O O’s reference line

41
Understanding the equation
absolute absolute Non-rotating, Moving with B absolute Non-rotating, Moving with B always perpendicular to line AB. Its direction can be deduced from Important key: Hint on solving problems Identify the known and unknown Any 2 points on the same rigid body A Above equation (2D: “3D-fake”) can be solved when there are at most 2 unknown scalar quantities B Above equations usually contains 5 scalar quantities (not including position vector r) Also works with A as the observer
 can be solved when there are at most 2 unknown scalar quantities. B. Above equations usually contains 5 scalar quantities (not including position vector r) Also works with A as the observer.")
42
Relative Vector Analysis on General Plane Motion
Fixed-Axis (Pure) Rotation w P w P G w P w of observer at G = w (of rigid body) of observer at O G
 Rotation. w. P. w. P. G. w. P. w of observer at G. = w (of rigid body) of observer at O. G.")
44
A, B on the same rigid body (bar AB)
Velocity at A is key point to find w A, B on the same rigid body (bar AB) Solved by Vector Analysis
 Solved by. Vector Analysis.")
45
+ + y x From i j k A B C O 3D vector calculation (i,j,k):
Sign indicates angular direction (right hand rule) x y
 x. y.")
46
A, B on the same rigid body (bar AB)
? M ? Solved by Graphical Method CW CW need to find the angular direction from the figure

47
middle link

49
Note: relative velocity technique
Direction is simply found: graphical solution: simplest, be careful about sign / 3D (i, j, k) vector: complicated, automatic sign indication : same in absolute and relative world Non-rotating To know of the rigid body A B A B
 vector: complicated, automatic sign indication. : same in absolute and relative world. Non-rotating. To know of the rigid body. A. B. A. B.")
51
D ? M ? wABC CCW Graphical solution

52
vB D ? M ? vA Vector solution Direction? CW

54
Relative Velocity (Part 2)
Another usage of the relative velocity equation B A on OD D 2 points need not be in the same rigid body B on screw parerell For constrained sliding contact between two links in a mechanism. Pick points A and B as coincident points, one on each link (the points may be imaginary). some reason later! The observer on B no longer see A moving around it in a circle. c.c.w.
. some reason later! The observer on B no longer see A moving around it in a circle. c.c.w.")
56
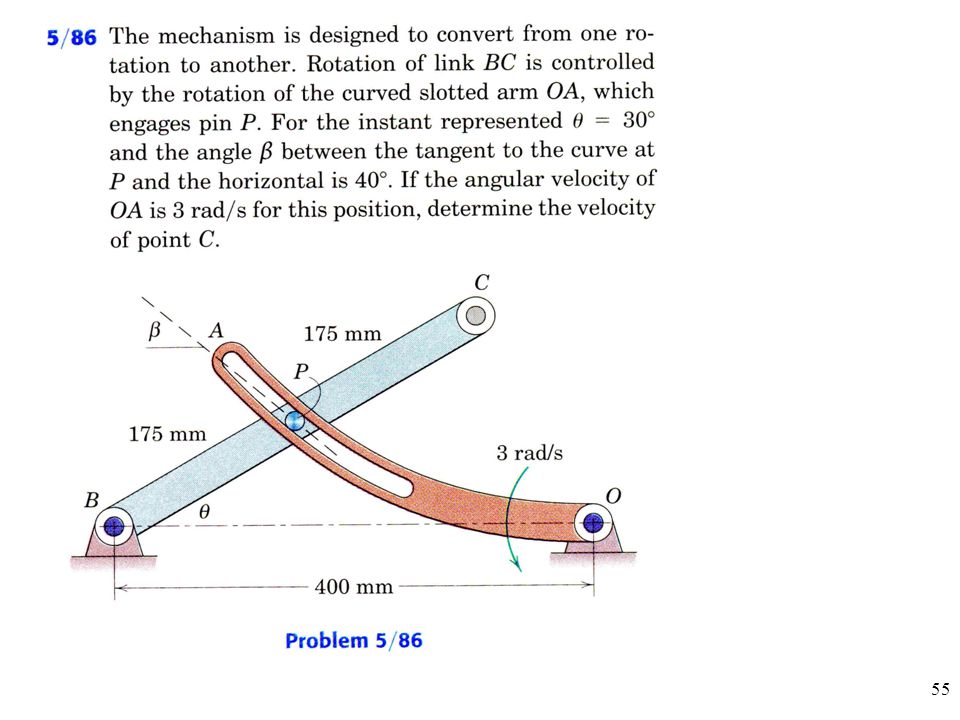
q f B O P 0.175 0.175cosq cosq M ? ? D CW Ans

58
y C x vQ vP 200 vQ/P 100 vO O CCW Plus Non-slipping condition b ? ? q
Q on slot C V=1.5 q=30 Non-slipping condition D C y O 100 x b vQ vP 200 ? ? vQ/P Plus q vO CCW

61
5/6 Relative Acceleration
concept Different viewpoint General Plane Motion = Translation + Rotation “simultaneous” Motion of point (observer) B, detected by O = Motion of plate moving “translationally” Since the distant between the two points on a rigid body is constant, an observer at one point will see the other point move in a circular motion around it! Wait! B really sees A moving circularly? B sees A has no movement !?!?!? O
 B, detected by O. = Motion of plate moving translationally Since the distant between the two points on a rigid body is constant, an observer at one point will see the other point move in a circular motion around it! Wait! B really sees A moving circularly B sees A has no movement ! ! ! O.")
62
Relative Acceleration (non-rotating observer)
We use: non-rotating observer (frame) attached to B Absolute world: Relative world: same? Only when non-rotating observer (see the proof at relative velocity part) Observer at B see A moving in a circle around it Observer O detects: Observer B detects:
 attached to B. Absolute world: Relative world: same Only when. non-rotating observer. (see the proof at relative velocity part) Observer at B see A moving in a circle around it. Observer O detects: Observer B detects:")
63
Understanding Equations
Non-rotating : the same both in absolute and relative (translation-only) world Hint on solving problems Identify the known and unknown Above equation (2D: “3D-fake”) can be solved when there are at most 2 unknown scalar quantities Above equations usually contains 6 scalar quantities (not including position vector r)
 world. Hint on solving problems. Identify the known and unknown. Above equation (2D: 3D-fake ) can be solved when there are at most 2 unknown scalar quantities. Above equations usually contains 6 scalar quantities. (not including position vector r)")
64
= + Given : (constant) Find :
 Find :")
65
Given : (constant) Find : (at this instant) ANS ANS
 Find : (at this instant) ANS ANS")
66
Find : (at this instant) Find velocity first, Before acceleration
 Find velocity first, Before acceleration")
67
Given : (constant) Find : (at this instant) ANS ANS
 Find : (at this instant) ANS ANS")
68
Practice before I.C.Z.V

69
Non-slipping condition
5/124 The center O of the disk has the velocity and acceleration shown in the figure. If the disk rolls without slipping on the horizontal surface, determine the velocity of A and the acceleration of B for the instant represented. Non-slipping condition You can calculate using point O and D. a w You can calculate using point O and and D. D I.C.Z.V

71
vA vE wOA O vA B vD wBD

72
aOA wOA=20 O

75
I.C.Z.V General Plane Motion (non-rotating observer)
Cross-Vector Approach Graphical Approach any point: A, B (on same rigid body moving in GPM) New technique I.C.Z.V B is special point : I.C.Z.V
 New technique. I.C.Z.V. B is special point : I.C.Z.V.")
76
Note: relative velocity technique
Direction is simply found: graphical solution: simplest, be careful about sign / 3D (i, j, k) vector: complicated, automatic sign indication : same in absolute and relative world Non-rotating To know of the rigid body A B A B
 vector: complicated, automatic sign indication. : same in absolute and relative world. Non-rotating. To know of the rigid body. A. B. A. B.")
78
Checkpoint: circular motion
Don’t know it is fixed-point rotation or not (General Motion) ? Fixed-point rotation (Rotation) from rotation point valid method? Yes! but show your reason! I.C.Z.V concept
 Fixed-point rotation. (Rotation) from rotation point. valid method Yes! but show your reason! I.C.Z.V concept.")
79
5/5 Instantaneous Center of Zero Velocity
General Plane motion 5/5 Instantaneous Center of Zero Velocity Extension theory using relative velocity. B A P w of observer at C = w of rigid body (in Absolute Observer’s perception) Z w Z is called I.C.Z.V (the point where its velocity at that instant is zero) each point on the body can be though of as rotating around point Z. - can find w easily by geometry - can find velocity and its direction of any points easily by geometry For calculating v and w only
 Z. w. Z is called I.C.Z.V (the point where its velocity at that instant is zero) each point on the body can be though of as rotating around point Z. - can find w easily by geometry. - can find velocity and its direction of any points easily by geometry. For calculating v and w only.")
80
5/5 Instantaneous Center of Zero Velocity
For a moving body at each instant of time, there is (always) a point on the rigid body (or on the extended body) with zero velocity. This point is call the “Instantaneous center of zero velocity” (I.C.Z.V.) How to find that point I.C.Z.V ? must be perpendicular to CA General Plane motion B A w of observer at C = w of rigid body (in Absolute Observer’s perception) Absolute velocity = relative velocity observing from an I.C.Z.V. For calculating velocity only, each point on the body can be though of as rotating around point C. I.C.Z.V
 a point on the rigid body (or on the extended body) with zero velocity. This point is call the Instantaneous center of zero velocity (I.C.Z.V.) How to find that point I.C.Z.V must be. perpendicular to CA. General. Plane motion. B. A. w of observer at C. = w of rigid body. (in Absolute Observer’s perception) Absolute velocity = relative velocity observing from an I.C.Z.V. For calculating velocity only, each point on the body can be though of as rotating around point C. I.C.Z.V.")
81
instantaneous velocity only
Finding an I.C.Z.V. A B not a rigid body “instantaneous” Translational motion z General Plane motion I.C.Z.V at Inf. A B A B A B z z z B A I.C.Z.V for calculating instantaneous velocity only w of observer at C = w of rigid body (in your perception) A B z az usually 0 (Even vz = 0) D
 A. B. z. az usually 0. (Even vz = 0) D.")
82
Direction of (absolute) velocity of two point in the same rigid body
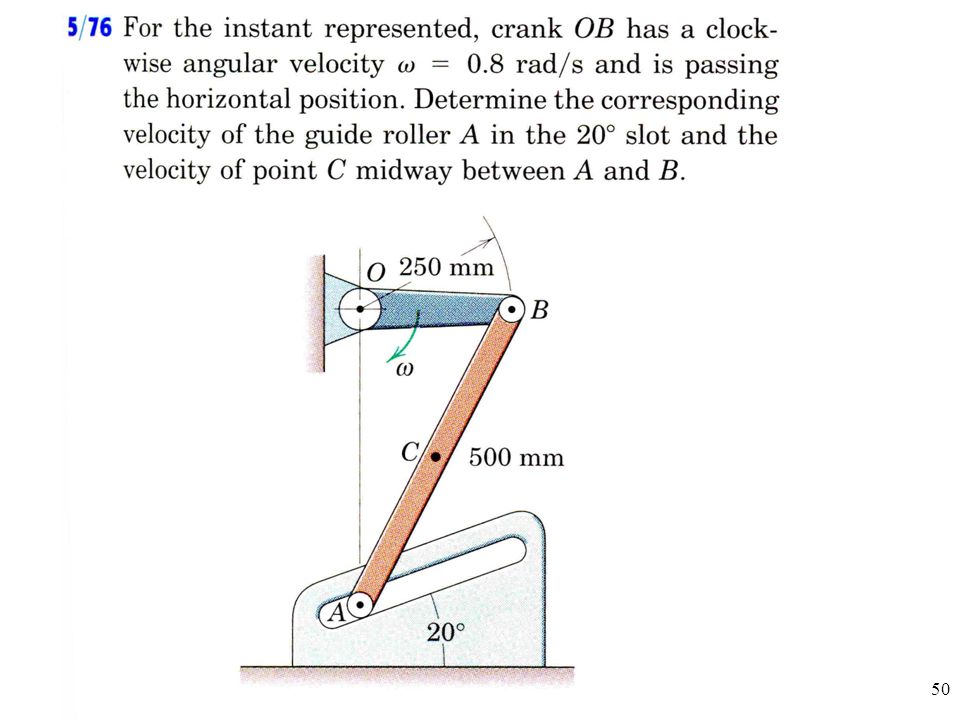
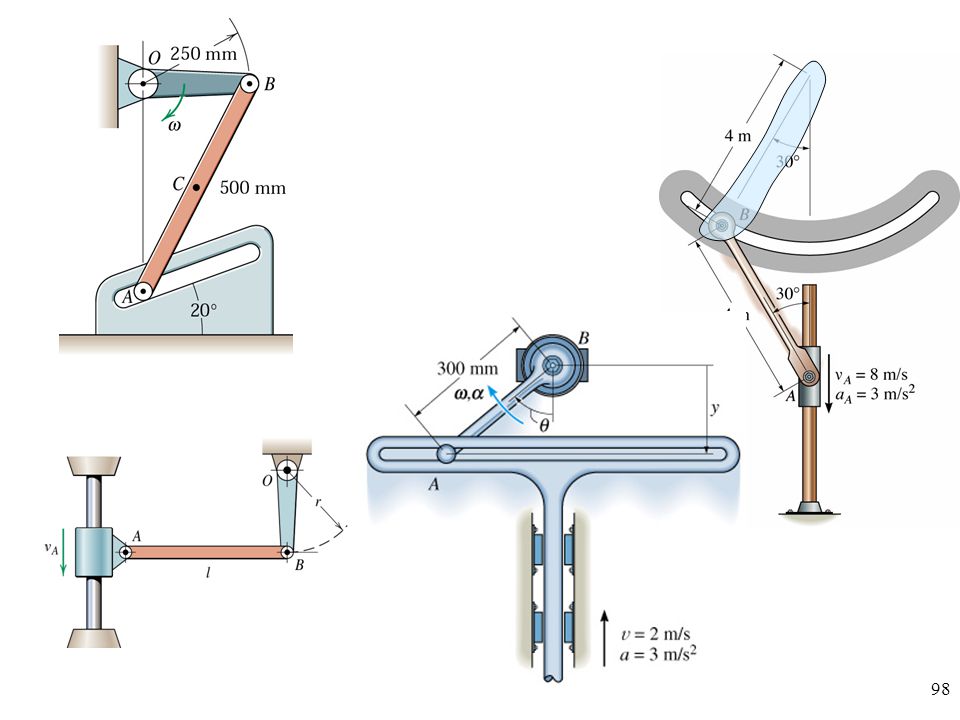
Arm OB of the linkage has a clockwise angular velocity of 10 rad/s in the position shown where = 45°. Determine the velocity of A, the velocity of D, and the angular velocity of link AB for the instant shown. w of what? OA, AB, BO solved by relative velocity I.C.Z.V D 350 M ? 381 ? Direction of (absolute) velocity of two point in the same rigid body w Thus, we can locate the instantaneous center of velocity, which is point C You have to find Direction yourself
 velocity. of two point in the same rigid body. w. Thus, we can locate the. instantaneous center of velocity, which is point C. You have to find. Direction yourself.")
83
Kinematics of Rigid Bodies
ICZV

84
a x y Vector Diagram vC rC q ICZV vB q rB q vA CCW

85
Non-slipping motion ICZV of P1 CW ICZV of sun ICZV of A CW ICZV of P2
Sun Gear: Fixed-Axis (Pure) rotation CCW Planet Gear: general Plane motion
 rotation. CCW. Planet Gear: general Plane motion.")
86
ICZV ICZV 100 mm

87
Non-slipping condition
I.C.Z.V Absolute motion rectilinear I.C.Z.V n circle t 5/140 I.C.Z.V

89
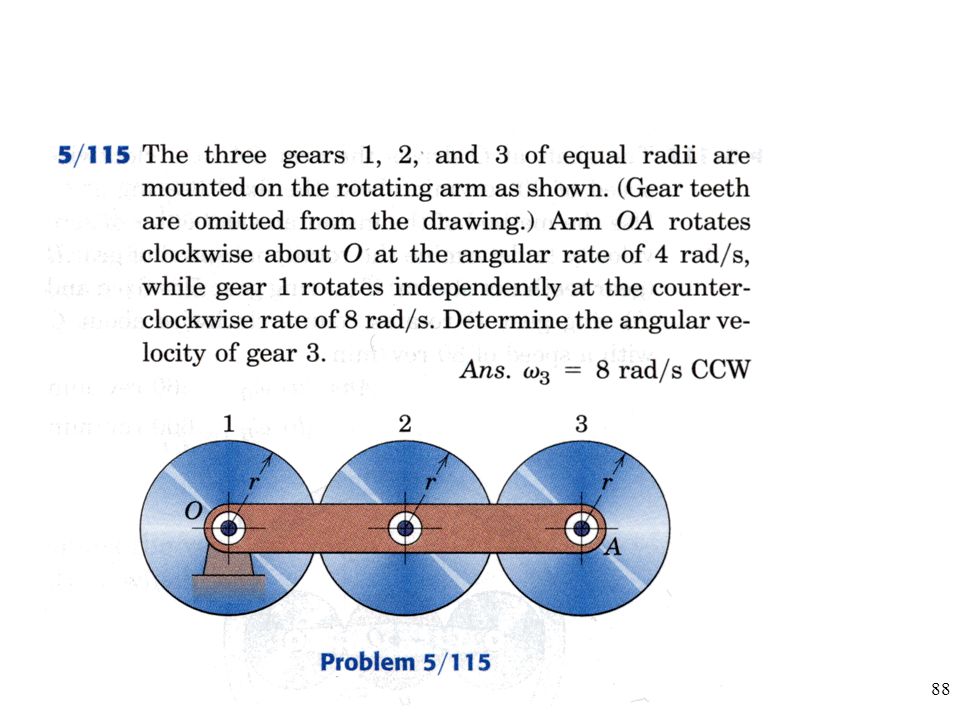
vC1 I vC1 =8r II d III vH2 = 8r vH2 vH3 vC2 vH3 vC2 4 rad/s VD1 ICZV
CW VD2 II d 4 rad/s vC2 vH2 = 8r ICZV VD3 III vC2 vH3 VD0 vH2 vH3 CCW

91
Practice Before Rotating Observer

92
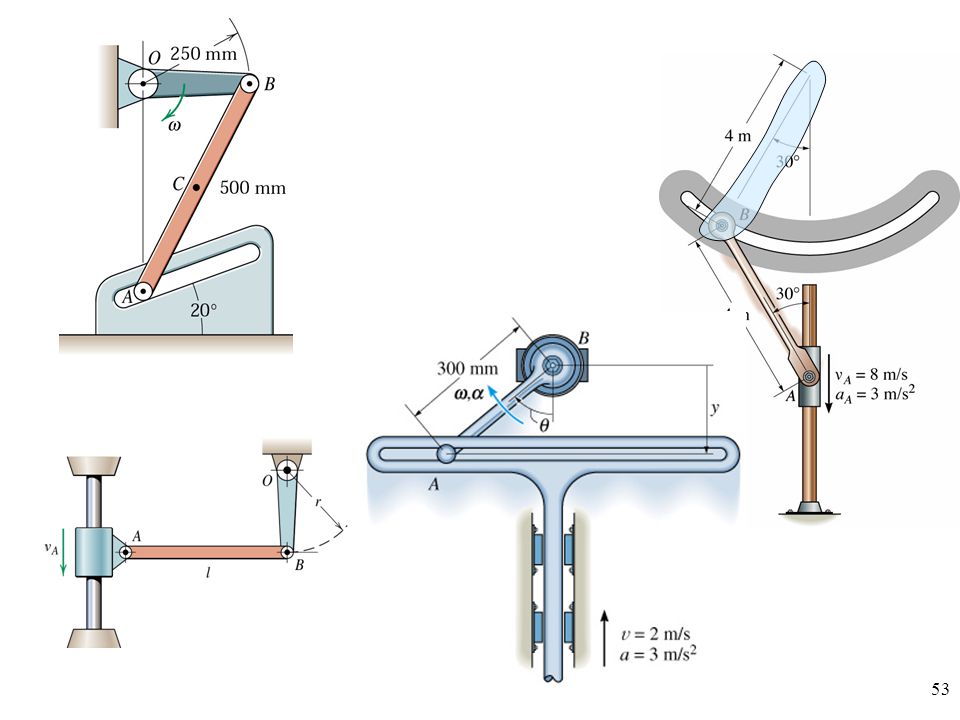
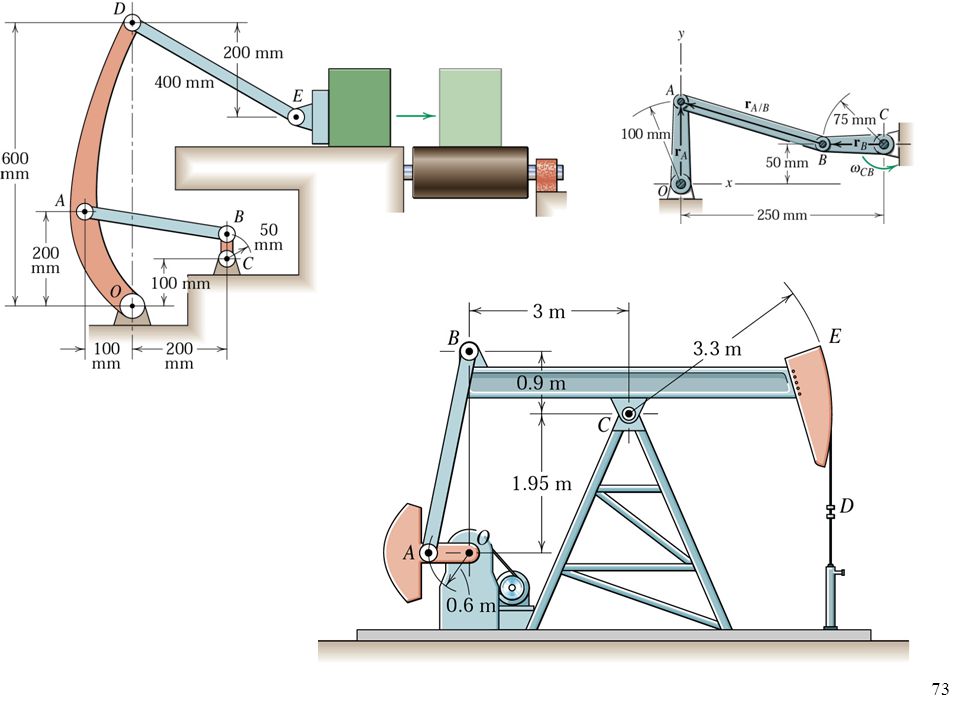
5/134 The sliding collar moves up and down the shaft, causing an oscillation of crank OB. If the velocity of A is not changing as it passes the null position where AB is horizontal and OB is vertical, determine the angular acceleration of OB in that position. CCW ICZV of AB CW

93
5/134 The sliding collar moves up and down the shaft, causing an oscillation of crank OB. If the velocity of A is not changing as it passes the null position where AB is horizontal and OB is vertical, determine the angular acceleration of OB in that position. CCW ICZV of AB =0 CW

95
ICZV of DAB is at infinite CW 3D vector solution CW Graphical solution

97
middle link

100
5/134 The sliding collar moves up and down the shaft, causing an oscillation of crank OB. If the velocity of A is not changing as it passes the null position where AB is horizontal and OB is vertical, determine the angular acceleration of OB in that position. CCW ICZV of AB =0 CW

102
ICZV at inf. AB translational. CW CW

103
CCW CCW

Similar presentations



















 (Ani Dönme Merkezi)>")




>")



>")

>")

>")
 OF ZERO VELOCITY (Section 16.6)>")



