Download presentation
Presentation is loading. Please wait.

1
Digital Communication Lecture-1
INTRODUCTION

2
Course Books Text: Digital Communications: Fundamentals and Applications, By “Bernard Sklar”, Prentice Hall, 2nd ed, 2001. Taub’s Principles of Communication Systems 3rd edition Herbert Taub , donald L Schilling , Goutam Saha Digital Communication R.N. Mutagi ( Oxford Press ) Probability and Random Signals for Electrical Engineers, Neon Garcia References: Digital Communications, Fourth Edition, J.G. Proakis, McGraw Hill, 2000.
 Probability and Random Signals for Electrical Engineers, Neon Garcia. References: Digital Communications, Fourth Edition, J.G. Proakis, McGraw Hill,")
3
Course Outline Review of Probability Signal and Spectra (Chapter 1)
Formatting and Base band Modulation (Chapter 2) Base band Demodulation/Detection (Chapter 3) Channel Coding (Chapter 6, 7 and 8) Band pass Modulation and Demod./Detect. (Chapter 4) Spread Spectrum Techniques (Chapter 12) Synchronization (Chapter 10) Source Coding (Chapter 13) Fading Channels (Chapter 15)
 Base band Demodulation/Detection (Chapter 3) Channel Coding (Chapter 6, 7 and 8) Band pass Modulation and Demod./Detect. (Chapter 4) Spread Spectrum Techniques (Chapter 12) Synchronization (Chapter 10) Source Coding (Chapter 13) Fading Channels (Chapter 15)")
4
Today’s Goal Review of Basic Probability Digital Communication Basic

5
Question Bank : Q-1 Explain basic communication system

6
Communication Source Transmitter Receiver Recipient Channel
Main purpose of communication is to transfer information from a source to a recipient via a channel or medium. Basic block diagram of a communication system: Source Transmitter Channel Receiver Recipient

7
Brief Description Source: analog or digital
Transmitter: transducer, amplifier, modulator, oscillator, power amp., antenna Channel: e.g. cable, optical fibre, free space Receiver: antenna, amplifier, demodulator, oscillator, power amplifier, transducer Recipient: e.g. person, (loud) speaker, computer
 speaker, computer.")
8
Types of information Voice, data, video, music, etc. Types of communication systems Public Switched Telephone Network (voice,fax,modem) Satellite systems Radio,TV broadcasting Cellular phones Computer networks (LANs, WANs, WLANs)
")
9
Information Representation
Communication system converts information into electrical electromagnetic/optical signals appropriate for the transmission medium. Analog systems convert analog message into signals that can propagate through the channel. Digital systems convert bits(digits, symbols) into signals Computers naturally generate information as characters/bits Most information can be converted into bits Analog signals converted to bits by sampling and quantizing (A/D conversion)
 into signals. Computers naturally generate information as characters/bits. Most information can be converted into bits. Analog signals converted to bits by sampling and quantizing (A/D conversion)")
10
Q – 2 Why we use Digital Signal ?

11
Why digital? Digital techniques need to distinguish between discrete symbols allowing regeneration versus amplification Good processing techniques are available for digital signals, such as medium. Data compression (or source coding) Error Correction (or channel coding)(A/D conversion) Equalization Security Easy to mix signals and data using digital techniques
 Error Correction (or channel coding)(A/D conversion) Equalization. Security. Easy to mix signals and data using digital techniques.")
13
Q- 3 Draw the complete Digital communication system block diagram and explain each blocks in brief.

16
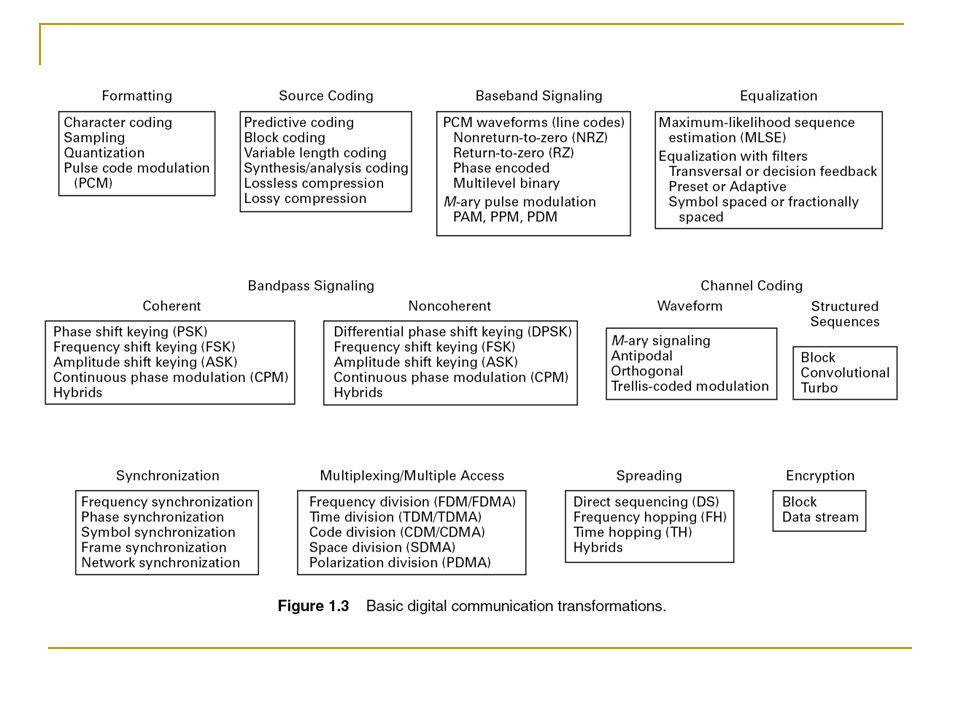
Basic Digital Communication Transformations
Formatting/Source Coding Transforms source info into digital symbols (digitization) Selects compatible waveforms (matching function) Introduces redundancy which facilitates accurate decoding despite errors It is essential for reliable communication Modulation/Demodulation Modulation is the process of modifying the info signal to facilitate transmission Demodulation reverses the process of modulation. It involves the detection and retrieval of the info signal Types Coherent: Requires a reference info for detection Noncoherent: Does not require reference phase information
 Selects compatible waveforms (matching function) Introduces redundancy which facilitates accurate decoding despite errors. It is essential for reliable communication. Modulation/Demodulation. Modulation is the process of modifying the info signal to facilitate transmission. Demodulation reverses the process of modulation. It involves the detection and retrieval of the info signal. Types. Coherent: Requires a reference info for detection. Noncoherent: Does not require reference phase information.")
17
Basic Digital Communication Transformations
Coding/Decoding Translating info bits to transmitter data symbols Techniques used to enhance info signal so that they are less vulnerable to channel impairment (e.g. noise, fading, jamming, interference) Two Categories Waveform Coding Produces new waveforms with better performance Structured Sequences Involves the use of redundant bits to determine the occurrence of error (and sometimes correct it) Multiplexing/Multiple Access Is synonymous with resource sharing with other users Frequency Division Multiplexing/Multiple Access (FDM/FDMA
 Two Categories. Waveform Coding. Produces new waveforms with better performance. Structured Sequences. Involves the use of redundant bits to determine the occurrence of error (and sometimes correct it) Multiplexing/Multiple Access Is synonymous with resource sharing with other users. Frequency Division Multiplexing/Multiple Access (FDM/FDMA.")
19
Q -4 Which are the basic performance metrics for digital communication system ? ( Advantages )
")
20
Performance Metrics Metric is fidelity: want
Analog Communication Systems Metric is fidelity: want SNR typically used as performance metric Digital Communication Systems Metrics are data rate (R bps) and probability of bit error Symbols already known at the receiver Without noise/distortion/sync. problem, we will never make bit errors
 and probability of bit error. Symbols already known at the receiver. Without noise/distortion/sync. problem, we will never make bit errors.")
21
Main Points Transmitters modulate analog messages or bits in case of a DCS for transmission over a channel. Receivers recreate signals or bits from received signal (mitigate channel effects) Performance metric for analog systems is fidelity, for digital it is the bit rate and error probability.
 Performance metric for analog systems is fidelity, for digital it is the bit rate and error probability.")
22
Q –5 Why we prefer Digital communication system ?

23
Why Digital Communications?
Easy to regenerate the distorted signal Regenerative repeaters along the transmission path can detect a digital signal and retransmit a new, clean (noise free) signal These repeaters prevent accumulation of noise along the path This is not possible with analog communication systems Two-state signal representation The input to a digital system is in the form of a sequence of bits (binary or M_ary) Immunity to distortion and interference Digital communication is rugged in the sense that it is more immune to channel noise and distortion
 signal. These repeaters prevent accumulation of noise along the path. This is not possible with analog communication systems. Two-state signal representation. The input to a digital system is in the form of a sequence of bits (binary or M_ary) Immunity to distortion and interference. Digital communication is rugged in the sense that it is more immune to channel noise and distortion.")
24
Why Digital Communications?
Hardware is more flexible Digital hardware implementation is flexible and permits the use of microprocessors, mini-processors, digital switching and VLSI Shorter design and production cycle Low cost The use of LSI and VLSI in the design of components and systems have resulted in lower cost Easier and more efficient to multiplex several digital signals Digital multiplexing techniques – Time & Code Division Multiple Access - are easier to implement than analog techniques such as Frequency Division Multiple Access

25
Why Digital Communications?
Can combine different signal types – data, voice, text, etc. Data communication in computers is digital in nature whereas voice communication between people is analog in nature The two types of communication are difficult to combine over the same medium in the analog domain. Using digital techniques, it is possible to combine both format for transmission through a common medium Encryption and privacy techniques are easier to implement Better overall performance Digital communication is inherently more efficient than analog in realizing the exchange of SNR for bandwidth Digital signals can be coded to yield extremely low rates and high fidelity as well as privacy

26
Q-6 Explain disadvantages of Digital communication system

27
Why Digital Communications?
Disadvantages Requires reliable “synchronization” Requires A/D conversions at high rate Requires larger bandwidth Nongraceful degradation Performance Criteria Probability of error or Bit Error Rate

28
Q-7 Why designing digital communication system what care we must take ?

29
Goals in Communication System Design
To maximize transmission rate, R To maximize system utilization, U To minimize bit error rate, Pe To minimize required systems bandwidth, W To minimize system complexity, Cx To minimize required power, Eb/No

30
Comparative Analysis of Analog and Digital Communication
Q-8 Compare Digital and analog communication systems. Q- 9 What is the advantage of digital over analog communication system ? Comparative Analysis of Analog and Digital Communication

31
Digital Signal Nomenclature
Information Source Discrete output values e.g. Keyboard Analog signal source e.g. output of a microphone Character Member of an alphanumeric/symbol (A to Z, 0 to 9) Characters can be mapped into a sequence of binary digits using one of the standardized codes such as ASCII: American Standard Code for Information Interchange EBCDIC: Extended Binary Coded Decimal Interchange Code
 Characters can be mapped into a sequence of binary digits using one of the standardized codes such as. ASCII: American Standard Code for Information Interchange. EBCDIC: Extended Binary Coded Decimal Interchange Code.")
32
Digital Signal Nomenclature
Digital Message Messages constructed from a finite number of symbols; e.g., printed language consists of 26 letters, 10 numbers, “space” and several punctuation marks. Hence a text is a digital message constructed from about 50 symbols Morse-coded telegraph message is a digital message constructed from two symbols “Mark” and “Space” M - ary A digital message constructed with M symbols Digital Waveform Current or voltage waveform that represents a digital symbol Bit Rate Actual rate at which information is transmitted per second

33
Digital Signal Nomenclature
Baud Rate Refers to the rate at which the signaling elements are transmitted, i.e. number of signaling elements per second. Bit Error Rate The probability that one of the bits is in error or simply the probability of error

34
Q-10 Classification of signals.

35
1.2 Classification Of Signals 1. Deterministic and Random Signals
A signal is deterministic means that there is no uncertainty with respect to its value at any time. Deterministic waveforms are modeled by explicit mathematical expressions, example: A signal is random means that there is some degree of uncertainty before the signal actually occurs. Random waveforms/ Random processes when examined over a long period may exhibit certain regularities that can be described in terms of probabilities and statistical averages.

36
2. Periodic and Non-periodic Signals
A signal x(t) is called periodic in time if there exists a constant T0 > 0 such that (1.2) t denotes time T0 is the period of x(t).
 is called periodic in time if there exists a constant. T0 > 0 such that. (1.2) t denotes time. T0 is the period of x(t).")
37
3. Analog and Discrete Signals
An analog signal x(t) is a continuous function of time; that is, x(t) is uniquely defined for all t A discrete signal x(kT) is one that exists only at discrete times; it is characterized by a sequence of numbers defined for each time, kT, where k is an integer T is a fixed time interval.
 is a continuous function of time; that is, x(t) is uniquely defined for all t. A discrete signal x(kT) is one that exists only at discrete times; it is characterized by a sequence of numbers defined for each time, kT, where. k is an integer. T is a fixed time interval.")
38
4. Energy and Power Signals
The performance of a communication system depends on the received signal energy; higher energy signals are detected more reliably (with fewer errors) than are lower energy signals x(t) is classified as an energy signal if, and only if, it has nonzero but finite energy (0 < Ex < ∞) for all time, where: (1.7) An energy signal has finite energy but zero average power. Signals that are both deterministic and non-periodic are classified as energy signals
 than are lower energy signals. x(t) is classified as an energy signal if, and only if, it has nonzero but finite energy (0 < Ex < ∞) for all time, where: (1.7) An energy signal has finite energy but zero average power. Signals that are both deterministic and non-periodic are classified as energy signals.")
39
4. Energy and Power Signals
Power is the rate at which energy is delivered. A signal is defined as a power signal if, and only if, it has finite but nonzero power (0 < Px < ∞) for all time, where (1.8) Power signal has finite average power but infinite energy. As a general rule, periodic signals and random signals are classified as power signals
 for all time, where. (1.8) Power signal has finite average power but infinite energy. As a general rule, periodic signals and random signals are classified as power signals.")
40
5. The Unit Impulse Function
Dirac delta function δ(t) or impulse function is an abstraction—an infinitely large amplitude pulse, with zero pulse width, and unity weight (area under the pulse), concentrated at the point where its argument is zero. (1.9) (1.10) (1.11) Sifting or Sampling Property (1.12)
 or impulse function is an abstraction—an infinitely large amplitude pulse, with zero pulse width, and unity weight (area under the pulse), concentrated at the point where its argument is zero. (1.9) (1.10) (1.11) Sifting or Sampling Property. (1.12)")
41
Q -11 Define Spectral Density

42
1.3 Spectral Density The spectral density of a signal characterizes the distribution of the signal’s energy or power in the frequency domain. This concept is particularly important when considering filtering in communication systems while evaluating the signal and noise at the filter output. The energy spectral density (ESD) or the power spectral density (PSD) is used in the evaluation.
 or the power spectral density (PSD) is used in the evaluation.")
43
1. Energy Spectral Density (ESD)
Energy spectral density describes the signal energy per unit bandwidth measured in joules/hertz. Represented as ψx(f), the squared magnitude spectrum (1.14) According to Parseval’s theorem, the energy of x(t): (1.13) Therefore: (1.15) The Energy spectral density is symmetrical in frequency about origin and total energy of the signal x(t) can be expressed as: (1.16)
, the squared magnitude spectrum. (1.14) According to Parseval’s theorem, the energy of x(t): (1.13) Therefore: (1.15) The Energy spectral density is symmetrical in frequency about origin and total energy of the signal x(t) can be expressed as: (1.16)")
44
2. Power Spectral Density (PSD)
The power spectral density (PSD) function Gx(f ) of the periodic signal x(t) is a real, even, and nonnegative function of frequency that gives the distribution of the power of x(t) in the frequency domain. PSD is represented as: (1.18) Whereas the average power of a periodic signal x(t) is represented as: (1.17) Using PSD, the average normalized power of a real-valued signal is represented as: (1.19)
 function Gx(f ) of the periodic signal x(t) is a real, even, and nonnegative function of frequency that gives the distribution of the power of x(t) in the frequency domain. PSD is represented as: (1.18) Whereas the average power of a periodic signal x(t) is represented as: (1.17) Using PSD, the average normalized power of a real-valued signal is represented as: (1.19)")
45
Q-12 Explain Autocorrelation

46
1.4 Autocorrelation 1. Autocorrelation of an Energy Signal
Correlation is a matching process; autocorrelation refers to the matching of a signal with a delayed version of itself. Autocorrelation function of a real-valued energy signal x(t) is defined as: (1.21) The autocorrelation function Rx(τ) provides a measure of how closely the signal matches a copy of itself as the copy is shifted τ units in time. Rx(τ) is not a function of time; it is only a function of the time difference τ between the waveform and its shifted copy.
 is defined as: (1.21) The autocorrelation function Rx(τ) provides a measure of how closely the signal matches a copy of itself as the copy is shifted. τ units in time. Rx(τ) is not a function of time; it is only a function of the time difference τ between the waveform and its shifted copy.")
47
1. Autocorrelation of an Energy Signal
The autocorrelation function of a real-valued energy signal has the following properties: symmetrical in about zero maximum value occurs at the origin autocorrelation and ESD form a Fourier transform pair, as designated by the double-headed arrows value at the origin is equal to the energy of the signal

48
2. Autocorrelation of a Power Signal
Autocorrelation function of a real-valued power signal x(t) is defined as: (1.22) When the power signal x(t) is periodic with period T0, the autocorrelation function can be expressed as (1.23)
 is defined as: (1.22) When the power signal x(t) is periodic with period T0, the autocorrelation function can be expressed as. (1.23)")
49
2. Autocorrelation of a Power Signal
The autocorrelation function of a real-valued periodic signal has the following properties similar to those of an energy signal: symmetrical in about zero maximum value occurs at the origin autocorrelation and PSD form a Fourier transform pair value at the origin is equal to the average power of the signal

50
Digital Communication Systems Lecture-2
PULSE MODULATION AND DIGITAL TRANSMISSION OF ANALOG SIGNAL

51
Q-13 What is formatting ?

52
Formatting

53
Example 1: In ASCII alphabets, numbers, and symbols are encoded using a 7-bit code A total of 27 = 128 different characters can be represented using a 7-bit unique ASCII code (see ASCII Table, Fig. 2.3)
")
54
Formatting Transmit and Receive Formatting
Transition from information source digital symbols information sink

55
Character Coding (Textual Information)
A textual information is a sequence of alphanumeric characters Alphanumeric and symbolic information are encoded into digital bits using one of several standard formats, e.g, ASCII, EBCDIC

56
Q-13 Explain process of sampling with neat sketches.

57
Transmission of Analog Signals
Structure of Digital Communication Transmitter Analog to Digital Conversion

58
Sampling Sampling is the processes of converting continuous-time analog signal, xa(t), into a discrete-time signal by taking the “samples” at discrete-time intervals Sampling analog signals makes them discrete in time but still continuous valued If done properly (Nyquist theorem is satisfied), sampling does not introduce distortion Sampled values: The value of the function at the sampling points Sampling interval: The time that separates sampling points (interval b/w samples), Ts If the signal is slowly varying, then fewer samples per second will be required than if the waveform is rapidly varying So, the optimum sampling rate depends on the maximum frequency component present in the signal
, into a discrete-time signal by taking the samples at discrete-time intervals. Sampling analog signals makes them discrete in time but still continuous valued. If done properly (Nyquist theorem is satisfied), sampling does not introduce distortion. Sampled values: The value of the function at the sampling points. Sampling interval: The time that separates sampling points (interval b/w samples), Ts. If the signal is slowly varying, then fewer samples per second will be required than if the waveform is rapidly varying. So, the optimum sampling rate depends on the maximum frequency component present in the signal.")
59
Analog-to-digital conversion is (basically) a 2 step process:
Sampling Convert from continuous-time analog signal xa(t) to discrete-time continuous value signal x(n) Is obtained by taking the “samples” of xa(t) at discrete-time intervals, Ts Quantization Convert from discrete-time continuous valued signal to discrete time discrete valued signal
 to discrete-time continuous value signal x(n) Is obtained by taking the samples of xa(t) at discrete-time intervals, Ts. Quantization. Convert from discrete-time continuous valued signal to discrete time discrete valued signal.")
60
Sampling Sampling Rate (or sampling frequency fs):
The rate at which the signal is sampled, expressed as the number of samples per second (reciprocal of the sampling interval), 1/Ts = fs Nyquist Sampling Theorem (or Nyquist Criterion): If the sampling is performed at a proper rate, no info is lost about the original signal and it can be properly reconstructed later on Statement: “If a signal is sampled at a rate at least, but not exactly equal to twice the max frequency component of the waveform, then the waveform can be exactly reconstructed from the samples without any distortion”
, 1/Ts = fs. Nyquist Sampling Theorem (or Nyquist Criterion): If the sampling is performed at a proper rate, no info is lost about the original signal and it can be properly reconstructed later on. Statement: If a signal is sampled at a rate at least, but not exactly equal to twice the max frequency component of the waveform, then the waveform can be exactly reconstructed from the samples without any distortion")
61
Sampling If Rs < 2B, aliasing (overlapping of the spectra) results
If signal is not strictly bandlimited, then it must be passed through Low Pass Filter (LPF) before sampling Fundamental Rule of Sampling (Nyquist Criterion) The value of the sampling frequency fs must be greater than twice the highest signal frequency fmax of the signal Types of sampling Ideal Sampling Natural Sampling Flat-Top Sampling
 before sampling. Fundamental Rule of Sampling (Nyquist Criterion) The value of the sampling frequency fs must be greater than twice the highest signal frequency fmax of the signal. Types of sampling. Ideal Sampling. Natural Sampling. Flat-Top Sampling.")
62
Q-14 Describe different sampling techniques with neat sketches.

63
Ideal Sampling ( or Impulse Sampling)
Is accomplished by the multiplication of the signal x(t) by the uniform train of impulses (comb function) Consider the instantaneous sampling of the analog signal x(t) Train of impulse functions select sample values at regular intervals Fourier Series representation: Ref: ex 2.12 BPL Ch .2
 by the uniform train of impulses (comb function) Consider the instantaneous sampling of the analog signal x(t) Train of impulse functions select sample values at regular intervals. Fourier Series representation: Ref: ex 2.12 BPL Ch .2.")
64
Ideal Sampling ( or Impulse Sampling)
Therefore, we have: Take Fourier Transform (frequency convolution) Ref : next slide
 Ref : next slide.")
66
Ideal Sampling ( or Impulse Sampling)
This shows that the Fourier Transform of the sampled signal is the Fourier Transform of the original signal at rate of 1/Ts

69
Ideal Sampling ( or Impulse Sampling)
This shows that the Fourier Transform of the sampled signal is the Fourier Transform of the original signal at rate of 1/Ts

70
Ideal Sampling ( or Impulse Sampling)
This means that the output is simply the replication of the original signal at discrete intervals, e.g

71
Ideal Sampling ( or Impulse Sampling)
As long as fs> 2fm,no overlap of repeated replicas X(f - n/Ts) will occur in Xs(f) Minimum Sampling Condition: Sampling Theorem: A finite energy function x(t) can be completely reconstructed from its sampled value x(nTs) with provided that =>
 will occur in Xs(f) Minimum Sampling Condition: Sampling Theorem: A finite energy function x(t) can be completely reconstructed from its sampled value x(nTs) with. provided that =>")
72
Ts is called the Nyquist interval: It is the longest time interval that can be used for sampling a bandlimited signal and still allow reconstruction of the signal at the receiver without distortion

73
It is practically difficult to create a train of impulses
Practical Sampling In practice we cannot perform ideal sampling It is practically difficult to create a train of impulses Thus a non-ideal approach to sampling must be used We can approximate a train of impulses using a train of very thin rectangular pulses: Note: Fourier Transform of impulse train is another impulse train Convolution with an impulse train is a shifting operation

74
Natural Sampling If we multiply x(t) by a train of rectangular pulses xp(t), we obtain a gated waveform that approximates the ideal sampled waveform, known as natural sampling or gating (see Figure 2.8)
 by a train of rectangular pulses xp(t), we obtain a gated waveform that approximates the ideal sampled waveform, known as natural sampling or gating (see Figure 2.8)")
75
Each pulse in xp(t) has width Ts and amplitude 1/Ts
The top of each pulse follows the variation of the signal being sampled Xs (f) is the replication of X(f) periodically every fs Hz Xs (f) is weighted by Cn Fourier Series Coeffiecient The problem with a natural sampled waveform is that the tops of the sample pulses are not flat It is not compatible with a digital system since the amplitude of each sample has infinite number of possible values Another technique known as flat top sampling is used to alleviate this problem
 is the replication of X(f) periodically every fs Hz. Xs (f) is weighted by Cn Fourier Series Coeffiecient. The problem with a natural sampled waveform is that the tops of the sample pulses are not flat. It is not compatible with a digital system since the amplitude of each sample has infinite number of possible values. Another technique known as flat top sampling is used to alleviate this problem.")
76
Flat-Top Sampling Here, the pulse is held to a constant height for the whole sample period Flat top sampling is obtained by the convolution of the signal obtained after ideal sampling with a unity amplitude rectangular pulse, p(t) This technique is used to realize Sample-and-Hold (S/H) operation In S/H, input signal is continuously sampled and then the value is held for as long as it takes to for the A/D to acquire its value Effect of the hold operation is the significant attenuation of the higher frequency spectral replicates.
 This technique is used to realize Sample-and-Hold (S/H) operation. In S/H, input signal is continuously sampled and then the value is held for as long as it takes to for the A/D to acquire its value. Effect of the hold operation is the significant attenuation of the higher frequency spectral replicates.")
77
Flat top sampling (Time Domain)
")
78
Taking the Fourier Transform will result to
where P(f) is a sinc function
 is a sinc function.")
79
Flat top sampling (Frequency Domain)
Flat top sampling becomes identical to ideal sampling as the width of the pulses become shorter

80
Q –15 Explain the method of reconstruction of signal from sampled signal.
Q- 16 What is aliasing ? How we can avoid aliasing ?

81
Recovering the Analog Signal
One way of recovering the original signal from sampled signal Xs(f) is to pass it through a Low Pass Filter (LPF) as shown below If fs > 2B then we recover x(t) exactly Else we run into some problems and signal is not fully recovered
 is to pass it through a Low Pass Filter (LPF) as shown below. If fs > 2B then we recover x(t) exactly. Else we run into some problems and signal is not fully recovered.")
82
Undersampling and Aliasing
If the waveform is undersampled (i.e. fs < 2B) then there will be spectral overlap in the sampled signal The signal at the output of the filter will be different from the original signal spectrum This is the outcome of aliasing! This implies that whenever the sampling condition is not met, an irreversible overlap of the spectral replicas is produced
 then there will be spectral overlap in the sampled signal. The signal at the output of the filter will be. different from the original signal spectrum. This is the outcome of aliasing! This implies that whenever the sampling condition is not met, an irreversible overlap of the spectral replicas is produced.")
83
x(t) containing higher frequency than were expected
This could be due to: x(t) containing higher frequency than were expected An error in calculating the sampling rate Under normal conditions, undersampling of signals causing aliasing is not recommended
 containing higher frequency than were expected. An error in calculating the sampling rate. Under normal conditions, undersampling of signals causing aliasing is not recommended.")
84
Solution 1: Anti-Aliasing Analog Filter
All physically realizable signals are not completely bandlimited If there is a significant amount of energy in frequencies above half the sampling frequency (fs/2), aliasing will occur Aliasing can be prevented by first passing the analog signal through an anti-aliasing filter (also called a prefilter) before sampling is performed The anti-aliasing filter is simply a LPF with cutoff frequency equal to half the sample rate
, aliasing will occur. Aliasing can be prevented by first passing the analog signal through an anti-aliasing filter (also called a prefilter) before sampling is performed. The anti-aliasing filter is simply a LPF with cutoff frequency equal to half the sample rate.")
85
Case 2 Aliasing is prevented by forcing the bandwidth of the sampled signal to satisfy the requirement of the Sampling Theorem Case 1

86
Solution 2: Over Sampling and Filtering in the Digital Domain
The signal is passed through a low performance (less costly) analog low-pass filter to limit the bandwidth. Sample the resulting signal at a high sampling frequency. The digital samples are then processed by a high performance digital filter and down sample the resulting signal. The alias frequency is given by fa = fs / 2 – ( f – fs / 2 ) = fs - f
 analog low-pass filter to limit the bandwidth. Sample the resulting signal at a high sampling frequency. The digital samples are then processed by a high performance digital filter and down sample the resulting signal. The alias frequency is given by. fa = fs / 2 – ( f – fs / 2 ) = fs - f.")
87
Example : A 5. 5 kHz tone is sampled at 8 KHz
Example : A 5.5 kHz tone is sampled at 8 KHz . Find the alias frequency generated. Solution : Here, f = 5.5 kHz and fs = 8 kHz From fa = fs / 2 – ( f – fs / 2 ) = fs – f fa = 8000 / 2 – ( 5500– 8000 / 2 ) = = 2500 = 2.5 kHz
 = fs – f. fa = 8000 / 2 – ( 5500– 8000 / 2 ) = = 2500 = 2.5 kHz.")
88
Q-17 Explain the method of sampling band pass signals.

89
Sampling of Bandpass Signals
X(f) (a) f X(f) (b) fs 2fs f f X(f) (c) X(f) f (d) band-pass signal (b) signal sampled at fs>2f2 (c) Signal sampled at fs>2(f2-f1) (d) Band-pass filter required for signal recovery
 (a) f. X(f) (b) fs. 2fs. f. f. X(f) (c) X(f) f. (d) band-pass signal (b) signal sampled at fs>2f2. (c) Signal sampled at fs>2(f2-f1) (d) Band-pass filter required for signal recovery.")
90
A band-pass signal occupies a frequency band from f1 to f2.
It has one sided spectrum as shown in figure (a). Sampling a band-pass signal at Nyquist rate spectrum is shown in fig (b). Clearly there are gaps in this spectrum. To avoid the spectrum overlap we can reduce the sampling frequency. Sampling frequency so arranged avoid overlapping of the spectrum fig(c). Minimum sampling frequency rate for a band-pass signal from the f1 to f2 , with bandwidth B=f2-f1 is given by Min fs = 2f2 / N where N is integer part of the ratio f2/B FDM signals and sub-band signals used in speech coding are examples of band-pass signals.
. Sampling a band-pass signal at Nyquist rate spectrum is shown in fig (b). Clearly there are gaps in this spectrum. To avoid the spectrum overlap we can reduce the sampling frequency. Sampling frequency so arranged avoid overlapping of the spectrum fig(c). Minimum sampling frequency rate for a band-pass signal from the f1 to f2 , with bandwidth B=f2-f1 is given by. Min fs = 2f2 / N where N is integer part of the ratio f2/B. FDM signals and sub-band signals used in speech coding are examples of band-pass signals.")
91
Example : a FM signal at 10.7 MHz IF needs to be digitized for demodulation in a digital domain. If the bandwidth of the signal is 200 kHz, find the minimum usable sampling frequency Solution : The Bandwidth B= f2-f1= 200 kHz. The center frequency , fIF = (f1+f2)/2 = 10,700 kHz. Therefore the highest frequency f2 = 10, = 10,800 kHz N = f2/B = 10,800/200 = 54 Minimum sampling frequency fs = 2*f2/N = 2 * (10,800 / 54 ) = 400 kHz
/2 = 10,700 kHz. Therefore the highest frequency f2 = 10, = 10,800 kHz. N = f2/B = 10,800/200 = 54. Minimum sampling frequency fs = 2*f2/N = 2 * (10,800 / 54 ) = 400 kHz.")
92
Example : A triangular waveform with 10 ms period is to be digitized
Example : A triangular waveform with 10 ms period is to be digitized. If the waveform fidelity is to be maintained up to its 10th harmonic, what should be the sampling frequency ? Solution : The fundamental frequency of the triangular waveform is f0 = 1/T = 1 / ( 10 x 10-3 ) = 100 Hz The 10th harmonic is , therefore fm = 10 * f0 = 10 x 100 = 1000 Hz Hence the sampling frequency is fs = 2 x 1000 = 2000 Hz
 = 100 Hz. The 10th harmonic is , therefore. fm = 10 * f0 = 10 x 100 = 1000 Hz. Hence the sampling frequency is. fs = 2 x 1000 = 2000 Hz.")
93
Summary Of Sampling Ideal Sampling (or Impulse Sampling)
Natural Sampling (or Gating) Flat-Top Sampling For all sampling techniques If fs > 2B then we can recover x(t) exactly If fs < 2B) spectral overlapping known as aliasing will occur
 Flat-Top Sampling. For all sampling techniques. If fs > 2B then we can recover x(t) exactly. If fs < 2B) spectral overlapping known as aliasing will occur.")
94
Example 1: Example 2: Consider the analog signal x(t) given by
What is the Nyquist rate for this signal? Example 2: Consider the analog signal xa(t) given by What is the Nyquist rate for this signal? What is the discrete time signal obtained after sampling, if fs=5000 samples/s. What is the analog signal x(t) that can be reconstructed from the sampled values?
 given by. What is the Nyquist rate for this signal What is the discrete time signal obtained after sampling, if fs=5000 samples/s. What is the analog signal x(t) that can be reconstructed from the sampled values")
95
Practical Sampling Rates
Speech - Telephone quality speech has a bandwidth of 4 kHz (actually 300 to 3300Hz) - Most digital telephone systems are sampled at samples/sec Audio: - The highest frequency the human ear can hear is approximately 15kHz - CD quality audio are sampled at rate of 44,000 samples/sec Video - The human eye requires samples at a rate of at least 20 frames/sec to achieve smooth motion
 - Most digital telephone systems are sampled at 8000 samples/sec. Audio: - The highest frequency the human ear can hear is approximately 15kHz. - CD quality audio are sampled at rate of 44,000 samples/sec. Video. - The human eye requires samples at a rate of at least 20 frames/sec to achieve smooth motion.")
96
Q-18 Explain PCM communication system with necessary blocks.

97
Pulse Code Modulation (PCM)
Pulse Code Modulation refers to a digital baseband signal that is generated directly from the quantizer output Sometimes the term PCM is used interchangeably with quantization

98
Q-19 What is quantization ?

99
See Figure 2.16 (Page 80) Natural samples, quantized samples and pulse code modulation
 Natural samples, quantized samples and pulse code modulation")
101
Each quantized sample is represented by a word consisting of three bits in the example. Space between words (i.e. samples) allow multiplexing.
 allow multiplexing..")
102
Q-20 Explain PCM system and mention its advantage

103
Pulse Code Modulation Figure The basic elements of a PCM system.
EE 541/451 Fall 2006

104
Advantages of PCM: Relatively inexpensive Easily multiplexed: PCM waveforms from different sources can be transmitted over a common digital channel (TDM) Easily regenerated: useful for long-distance communication, e.g. telephone Better noise performance than analog system Signals may be stored and time-scaled efficiently (e.g., satellite communication) Efficient codes are readily available Disadvantage: Requires wider bandwidth than analog signals
 Easily regenerated: useful for long-distance communication, e.g. telephone. Better noise performance than analog system. Signals may be stored and time-scaled efficiently (e.g., satellite communication) Efficient codes are readily available. Disadvantage: Requires wider bandwidth than analog signals.")
105
Q- 21 Mention different source of corruption in sampling and quantization process.

106
2.5 Sources of Corruption in the sampled, quantized and transmitted pulses
Sampling and Quantization Effects Quantization (Granularity) Noise: Results when quantization levels are not finely spaced apart enough to accurately approximate input signal resulting in truncation or rounding error. Quantizer Saturation or Overload Noise: Results when input signal is larger in magnitude than highest quantization level resulting in clipping of the signal. Timing Jitter: Error caused by a shift in the sampler position. Can be isolated with stable clock reference. Channel Effects Channel Noise Intersymbol Interference (ISI)
 Noise: Results when quantization levels are not finely spaced apart enough to accurately approximate input signal resulting in truncation or rounding error. Quantizer Saturation or Overload Noise: Results when input signal is larger in magnitude than highest quantization level resulting in clipping of the signal. Timing Jitter: Error caused by a shift in the sampler position. Can be isolated with stable clock reference. Channel Effects. Channel Noise. Intersymbol Interference (ISI)")
107
Channel Noise : Thermal noise , interference from other users and interference from circuit switching transients can cause errors in detecting the pulses carrying the digitized samples. Channel induced error degrades the reconstructed signal quality. Rapid degradation of output signal quality with channel induced error is called threshold effect. Intersymbol Interference : The channel is always band limited . A band limited channel disperses or spreads a pulse waveform passing through it. Channel BW > Pulse BW then spreading will slight When channel BW close to signal BW the spreading will exceed a symbol duration and cause signal pulses to overlap. This is called Inter symbol interference , ISI which degrades the system performance Rising the signal power can not overcome the error performance

108
Signal to Quantization Noise Ratio
The level of quantization noise is dependent on how close any particular sample is to one of the L levels in the converter For a speech input, this quantization error resembles a noise-like disturbance at the output of a DAC converter

109
Q- 22 Explain uniform quantization
Q- 23 Explain non uniform quantization Q-24 Compare Uniform and non uniform quantization

110
i.e. when all values within the range are equally likely
Uniform Quantization A Quantizer with equal quantization level is a Uniform Quantizer Each sample is approximated within a quantile interval Uniform Quantizer are optimal when the input distribution is uniform i.e. when all values within the range are equally likely Most ADC’s are implemented using uniform Quantizer Error of a uniform quantizer is bounded by

111
Q –25 What is quantization noise ?
Q-26 What is quantization error ? Q-27 Derive the equation for Quantization error

112
Figure illustrates L- level quantizer for a signal having peak to peak voltage range Vpp = Vp – (- Vp) = 2Vp volts. The step size between quantization levels, called the QUANTILE interval , is denoted by q volts. Each sample value is approximated with a quantized pulse ; the approximation will result in error no larger than q/2 or –q/2 in positive and negative direction respectively.

113
Signal to Quantization Noise Ratio
A useful figure of merit for the uniform quantizer is the quantizer variance. The mean-squared value (noise variance) of the quantization error is given by: Where p(e) =1/q is the uniform probability density function of the quantization error.
 of the quantization error is given by: Where p(e) =1/q is the uniform probability density function of the quantization error.")
114
Q-28 Derive the equation for signal to quantization noise ratio or SQNR

115
The variance σ2 , corresponds to the average quantization noise power.
The peak power of the analog signal (normalized to 1 Ω )can be expressed as: Therefore the Signal to Quantization Noise Ratio is given by: L is no of quantization levels. L x q = 2 Vp= Vpp Vp = L x q / 2 L=2n For perfect understanding refer next few slides
can be expressed as: Therefore the Signal to Quantization Noise Ratio is given by: L is no of quantization levels. L x q = 2 Vp= Vpp. Vp = L x q / 2. L=2n. For perfect understanding refer next few slides.")
116
Average signal power of the applied input signal is given by
(1) The quantization noise is (2) The number of quantization levels is L then L x q = 2Vp So that Vp = L x q / 2 (3)
 The quantization noise is. (2) The number of quantization levels is L then L x q = 2Vp. So that. Vp = L x q / 2. (3)")
117
Q-29 Derive the equation for signal to quantization noise ratio or SQNR
Ref : Taub and Shilling ( Principles of communication systems)
")
118
Using (1) , (2) and (3) Since L = 2n
 , (2) and (3) Since L = 2n")
119
Since L = 2n, SNR = 22n or in decibels
where L = 2n is the number of quantization levels for the converter. (n is the number of bits). Since L = 2n, SNR = 22n or in decibels If q is the step size, then the maximum quantization error that can occur in the sampled output of an A/D converter is q Vpp= 2V= qL
. Since L = 2n, SNR = 22n or in decibels. If q is the step size, then the maximum quantization error that can occur in the sampled output of an A/D converter is q. Vpp= 2V= qL.")
120
Q-30 Explain PWM and PPM modulation and demodulation with necessary sketches.
Q-31 Explain different pulse modulation techniques with necessary sketches.

121
Pulse Modulation Two Types: Pulse Amplitude Modulation (PAM)
Recall that analog signals can be represented by a sequence of discrete samples (output of sampler) Pulse Modulation results when some characteristic of the pulse (amplitude, width or position) is varied in correspondence with the data signal Two Types: Pulse Amplitude Modulation (PAM) The amplitude of the periodic pulse train is varied in proportion to the sample values of the analog signal Pulse Time Modulation Encodes the sample values into the time axis of the digital signal Pulse Width Modulation (PWM) Constant amplitude, width varied in proportion to the signal Pulse Duration Modulation (PDM) sample values of the analog waveform are used in determining the width of the pulse signal
 Pulse Modulation results when some characteristic of the pulse (amplitude, width or position) is varied in correspondence with the data signal. Two Types: Pulse Amplitude Modulation (PAM) The amplitude of the periodic pulse train is varied in proportion to the sample values of the analog signal. Pulse Time Modulation. Encodes the sample values into the time axis of the digital signal. Pulse Width Modulation (PWM) Constant amplitude, width varied in proportion to the signal. Pulse Duration Modulation (PDM) sample values of the analog waveform are used in determining the width of the pulse signal.")
123
Pulse Width Modulation (PWM) and Pulse Position Modulation (PPM) - 1
In PWM, message modulates the width of the pulse and in PPM, message modulates position of the fixed width pulse. These are not suitable for TDM.

124
Pulse Width Modulation (PWM) and Pulse Position Modulation (PPM) - 2
 and Pulse Position Modulation (PPM) - 2")
125
Pulse Width Modulation (PWM) and Pulse Position Modulation (PPM)
PWM the message modulates the width of the pulse . PPM the position of the arrival of a fixed width pulse in each sample period is modulated by the message signal. Disadvantage : the randomness of the width in PWM and randomness in position in PPM , not suitable for time division multiplexing scheme. As a consequence their contribution to communication is limited. PWM finds its application in motor control, in delivery of power which is precisely regulated by regulating the width of the pulse. ( Power electronics , Chopper ) Together PWM and PPM are known as Pulse Time Modulation or PTM.
 Together PWM and PPM are known as Pulse Time Modulation or PTM.")
126
Pulse Width Modulation (PWM)
We have a comparator , one input of which is fed by input message signal and the other by a sawtooth signal which operated at a carrier frequency. The maximum of the input signal ( both +ve and –ve side) should be less than that of sawtooth signal.
 should be less than that of sawtooth signal.")
127
Output of comparator will be PWM wave
PWM pulses occur at regular interval, its rising edge coinciding with the falling edge sawtooth signal.

128
When sawtooth signal as its minimum, which is always less than the minimum of input signal the +Ve input of the comparator is at higher potential and the comparator output is positive. When the sawtooth signal rises with a fixed slope and crosses input signal value the –Ve input of comparator is at higher potential and the comparator output will be –Ve. The duration for which the comparator stays at high is thus dependent on input signal magnitude and this decides the width of the pulse generated. Message information gets reflected in the time during comparator output is at HIGH ( +Ve) or the width of the pulse generated at its output which is directly proportional to amplitude of the message signal at that instant.
 or the width of the pulse generated at its output which is directly proportional to amplitude of the message signal at that instant.")
129
Pulse Position Modulation (PPM)
PPM generation is usually a post processing of PWM signal and is shown in figure (b) PWM signal generated as above is sent to an inverter which reveres polarity of the pulses. it is followed by a differentiator , we will have +Ve spike where in original PWM signal pulse was going from HIGH to LOW and –Ve spikes where LOW to HIGH.
 PWM signal generated as above is sent to an inverter which reveres polarity of the pulses. it is followed by a differentiator , we will have +Ve spike where in original PWM signal pulse was going from HIGH to LOW and –Ve spikes where LOW to HIGH.")
130
these spikes are then fed to a +Ve edge triggered fixed width pulse generator which generates pulses of fixed width when a +Ve spike appeared , coinciding with the falling edge of original PWM signal.

131
the occurrence of these falling edges were dependent ( proportional to amplitude of message) on input message and hence the delay in occurrence of these fixed width pulses are proportional to the amplitude of the message at that instant. IC 710 Comparator, The inverter – differentiator block of fig(b) designed using op-amp and RC components. The fixed width pulse generator can be a monoshot device like IC , IC 555 etc. Demodulation of PWM For PWM demodulation , start a ramp at the positive edge and stop it when the negative edge comes. Since the widths are different these ramps will reach different heights in each cycle which is directly proportional to pulse width and in turn the amplitude of the modulating signal.
 designed using op-amp and RC components. The fixed width pulse generator can be a monoshot device like IC , IC 555 etc. Demodulation of PWM. For PWM demodulation , start a ramp at the positive edge and stop it when the negative edge comes. Since the widths are different these ramps will reach different heights in each cycle which is directly proportional to pulse width and in turn the amplitude of the modulating signal.")
132
This when passed through a low pass filter will follow the envelope i
This when passed through a low pass filter will follow the envelope i.e. message signal and the demodulation is done. PPM Demodulation Similar scheme is employed , now the ramp starts at one positive edge of the pulse and stops at the positive edge of the next pulse. Thus the delay between the pulses decides the height of the ramp generated and in turn closely follows the modulating message amplitude. Low pass filter after that filters out the envelope information as demodulated signal. Transistor and RC combination can be used both for ramp generation and filtering to implement a demodulator circuit. If synchronous clock is available then PPM can be converted to PWM ( fig) and then PWM demodulator can be used to get the message signal back. Between PWM and PPM , the latter gives better performance in a noisy system
 and then PWM demodulator can be used to get the message signal back. Between PWM and PPM , the latter gives better performance in a noisy system.")
133
SR edge triggered flip-flop is set by +Ve edge of the clock.
It remains set so that output Q is High, till a +ve edge from PPM resets it. The more the delay in arrival , the longer the duration Q remains high. It is again set in the next clock period by the rising edge of clock pulse. Thus the output of the flip-flop is a train of pulses , the width of which is decided by how late PPM pulses arrive in a particular clock period in which again the message information is contained.

134
Pulse Width Modulation (PWM) and Pulse Position Modulation (PPM) - 3
 and Pulse Position Modulation (PPM) - 3")
135
Q-32 Explain quantization and quantization error
Q-32 Explain quantization and quantization error. Derive the necessary question for quantization error. ( Ref : Taub and Schilling )
")
136
Quantization for Digital Representation-1
Understanding of quantization from Taub and Schilling

137
Quantization error : the quantized signal and the original signal from which it was derived differ from one another in a random manner. This difference or error may be viewed as a noise due to the quantization process and is called QUANTIZATION ERROR. Calculation of Quantization error : where e is the difference between original and quantized signal voltage. Let us divide total peak-to-peak range of the message signal m(t) into M equal voltage intervals, each of magnitude S volts. At the center of the each voltage interval we locate a quantization level m1,m2,m3,…., mM as shown in figure (a) ( next slide). Dashed level instantaneous value of the message signal m(t) at a time t. -- m(t) happens to be closest o the level mk , the quantizer output will be mk, the voltage corresponding to that level. The error is e = m(t) – mk
 into M equal voltage intervals, each of magnitude S volts. At the center of the each voltage interval we locate a quantization level m1,m2,m3,…., mM as shown in figure (a) ( next slide). Dashed level instantaneous value of the message signal m(t) at a time t. -- m(t) happens to be closest o the level mk , the quantizer output will be mk, the voltage corresponding to that level. The error is e = m(t) – mk.")
138
Quantization for Digital Representation-2
Right : Range of voltage over which signal m(t) makes excursion is divided into M quantization range each of size S. Left : The error voltage e(t) as a function of the instantaneous value of he signal m(t).
 makes excursion is divided into M quantization range each of size S. Left : The error voltage e(t) as a function of the instantaneous value of he signal m(t).")
139
Quantization for Digital Representation-3
Quantization error : f(m) is pdf and considered constant for each quantization level Substituting x=(m-mk) f(x) S is the probability that the signal voltage m(t) will be in the all quantization range so the sum of terms in the parenthesis has a total value of unity
 is pdf and considered constant for each quantization level. Substituting x=(m-mk) f(x) S is the probability that the signal voltage m(t) will be in the all quantization range so the sum of terms in the parenthesis has a total value of unity.")
140
Q-33 Explain COMPANDING ? What is the advantage ?
Q- 34 Explain different companding techniques .

141
COMPANDING The dynamic range can be improved by companding i.e. by first compressing and then expanding. A small amplitude signal will range through more quantization region.

142
Nonuniform Quantization
Nonuniform quantizers have unequally spaced levels The spacing can be chosen to optimize the Signal-to-Noise Ratio for a particular type of signal It is characterized by: Variable step size Quantizer size depend on signal size

143
Many signals such as speech have a nonuniform distribution
See Figure on next page (Fig. 2.17) Basic principle is to use more levels at regions with large probability density function (pdf) Concentrate quantization levels in areas of largest pdf Or use fine quantization (small step size) for weak signals and coarse quantization (large step size) for strong signals
 Basic principle is to use more levels at regions with large probability density function (pdf) Concentrate quantization levels in areas of largest pdf. Or use fine quantization (small step size) for weak signals and coarse quantization (large step size) for strong signals.")
144
Statistics of speech Signal Amplitudes
Figure 2.17: Statistical distribution of single talker speech signal magnitudes (Page 81)
")
146
Nonuniform quantization using companding
Companding is a method of reducing the number of bits required in ADC while achieving an equivalent dynamic range or SQNR In order to improve the resolution of weak signals within a converter, and hence enhance the SQNR, the weak signals need to be enlarged, or the quantization step size decreased, but only for the weak signals But strong signals can potentially be reduced without significantly degrading the SQNR or alternatively increasing quantization step size The compression process at the transmitter must be matched with an equivalent expansion process at the receiver

147
The signal below shows the effect of compression, where the amplitude of one of the signals is compressed After compression, input to the quantizer will have a more uniform distribution after sampling At the receiver, the signal is expanded by an inverse operation The process of COMpressing and exPANDING the signal is called companding Companding is a technique used to reduce the number of bits required in ADC or DAC while achieving comparable SQNR

148
Basically, companding introduces a nonlinearity into the signal
This maps a nonuniform distribution into something that more closely resembles a uniform distribution A standard ADC with uniform spacing between levels can be used after the compandor (or compander) The companding operation is inverted at the receiver There are in fact two standard logarithm based companding techniques US standard called µ-law companding European standard called A-law companding
 The companding operation is inverted at the receiver. There are in fact two standard logarithm based companding techniques. US standard called µ-law companding. European standard called A-law companding.")
149
Input/Output Relationship of Compander
Logarithmic expression Y = log X is the most commonly used compander This reduces the dynamic range of Y

150
Types of Companding -Law Companding Standard (North & South America, and Japan)
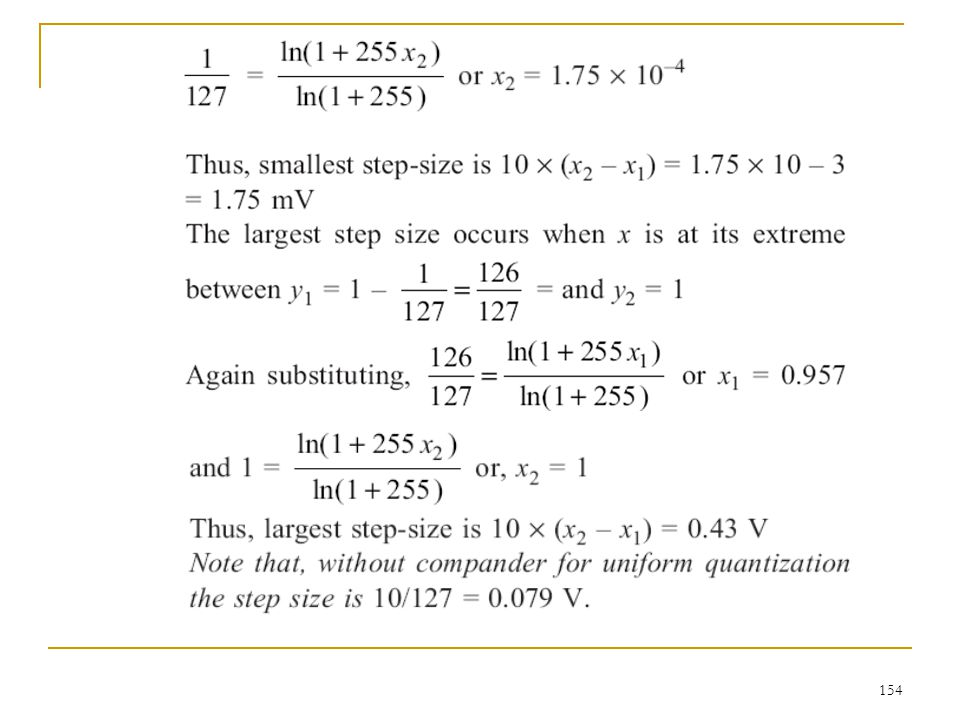
where x and y represent the input and output voltages is a constant number determined by experiment In the U.S., telephone lines uses companding with = 255 Samples 4 kHz speech waveform at 8,000 sample/sec Encodes each sample with 8 bits, L = 256 quantizer levels Hence data rate R = 64 kbit/sec ( 8,000 x 8 = 64,000) = 0 corresponds to uniform quantization
 = 0 corresponds to uniform quantization.")
151
A-Law Companding Standard (Europe, China, Russia, Asia, Africa)
where x and y represent the input and output voltages A = 87.6 A is a constant number determined by experiment

155
Q- Explain different line codes

156
PCM Waveform Types The output of the A/D converter is a set of binary bits But binary bits are just abstract entities that have no physical definition We use pulses to convey a bit of information, e.g., In order to transmit the bits over a physical channel they must be transformed into a physical waveform A line coder or baseband binary transmitter transforms a stream of bits into a physical waveform suitable for transmission over a channel Line coders use the terminology mark for “1” and space to mean “0” In baseband systems, binary data can be transmitted using many kinds of pulses

157
There are many types of waveforms. Why? performance criteria!
Each line code type have merits and demerits The choice of waveform depends on operating characteristics of a system such as: Modulation-demodulation requirements Bandwidth requirement Synchronization requirement Receiver complexity, etc.,

158
Goals of Line Coding (qualities to look for)
A line code is designed to meet one or more of the following goals: Self-synchronization The ability to recover timing from the signal itself That is, self-clocking (self-synchronization) - ease of clock lock or signal recovery for symbol synchronization Long series of ones and zeros could cause a problem Low probability of bit error Receiver needs to be able to distinguish the waveform associated with a mark from the waveform associated with a space BER performance relative immunity to noise Error detection capability enhances low probability of error
 - ease of clock lock or signal recovery for symbol synchronization. Long series of ones and zeros could cause a problem. Low probability of bit error. Receiver needs to be able to distinguish the waveform associated with a mark from the waveform associated with a space. BER performance. relative immunity to noise. Error detection capability. enhances low probability of error.")
159
Spectrum Suitable for the channel
Spectrum matching of the channel e.g. presence or absence of DC level In some cases DC components should be avoided The transmission bandwidth should be minimized Power Spectral Density Particularly its value at zero PSD of code should be negligible at the frequency near zero Transmission Bandwidth Should be as small as possible Transparency The property that any arbitrary symbol or bit pattern can be transmitted and received, i.e., all possible data sequence should be faithfully reproducible

160
Line Coder The input to the line encoder is the output of the A/D converter or a sequence of values an that is a function of the data bit The output of the line encoder is a waveform: where f(t) is the pulse shape and Tb is the bit period (Tb=Ts/n for n bit quantizer) This means that each line code is described by a symbol mapping function an and pulse shape f(t) Details of this operation are set by the type of line code that is being used
 is the pulse shape and Tb is the bit period (Tb=Ts/n for n bit quantizer) This means that each line code is described by a symbol mapping function an and pulse shape f(t) Details of this operation are set by the type of line code that is being used.")
161
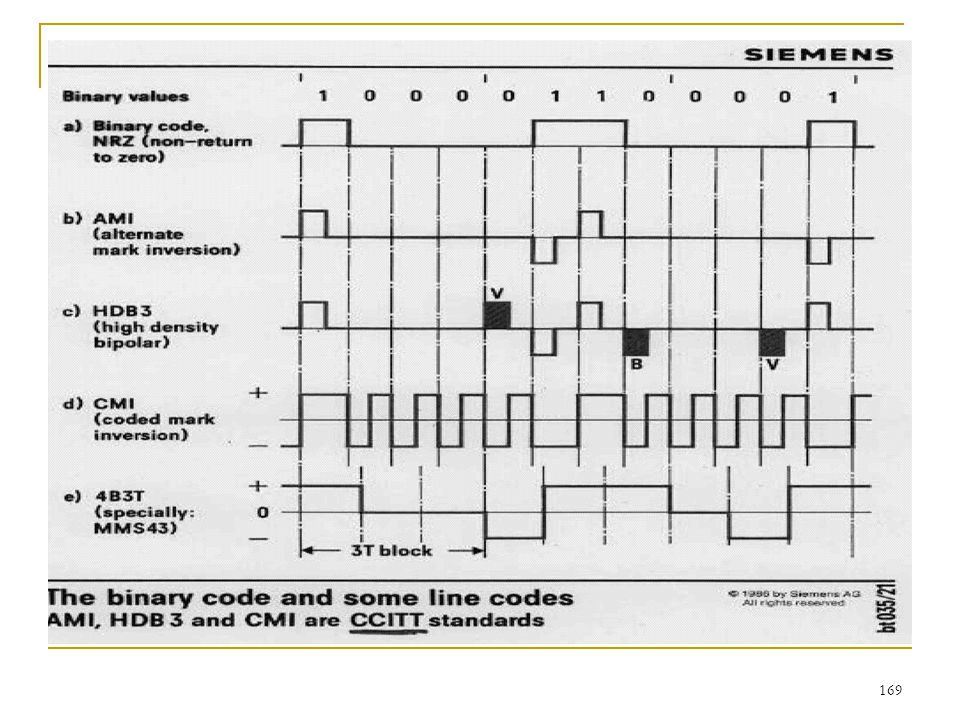
Summary of Major Line Codes
Categories of Line Codes Polar - Send pulse or negative of pulse Unipolar - Send pulse or a 0 Bipolar (a.k.a. alternate mark inversion, pseudoternary) Represent 1 by alternating signed pulses Generalized Pulse Shapes NRZ -Pulse lasts entire bit period Polar NRZ Bipolar NRZ RZ - Return to Zero - pulse lasts just half of bit period Polar RZ Bipolar RZ Manchester Line Code Send a 2- pulse for either 1 (high low) or 0 (low high) Includes rising and falling edge in each pulse No DC component
 Represent 1 by alternating signed pulses. Generalized Pulse Shapes. NRZ -Pulse lasts entire bit period. Polar NRZ. Bipolar NRZ. RZ - Return to Zero - pulse lasts just half of bit period. Polar RZ. Bipolar RZ. Manchester Line Code. Send a 2- pulse for either 1 (high low) or 0 (low high) Includes rising and falling edge in each pulse. No DC component.")
162
Turn the pulse ON for a ‘1’, leave the pulse OFF for a ‘0’
When the category and the generalized shapes are combined, we have the following: Polar NRZ: Wireless, radio, and satellite applications primarily use Polar NRZ because bandwidth is precious Unipolar NRZ Turn the pulse ON for a ‘1’, leave the pulse OFF for a ‘0’ Useful for noncoherent communication where receiver can’t decide the sign of a pulse fiber optic communication often use this signaling format Unipolar RZ RZ signaling has both a rising and falling edge of the pulse This can be useful for timing and synchronization purposes

163
Alternating like this eliminates the DC component
Bipolar RZ A unipolar line code, except now we alternate between positive and negative pulses to send a ‘1’ Alternating like this eliminates the DC component This is desirable for many channels that cannot transmit the DC components Generalized Grouping Non-Return-to-Zero: NRZ-L, NRZ-M NRZ-S Return-to-Zero: Unipolar, Bipolar, AMI Phase-Coded: bi-f-L, bi-f-M, bi-f-S, Miller, Delay Modulation Multilevel Binary: dicode, doubinary Note:There are many other variations of line codes (see Fig. 2.22, page 80 for more)
")
164
Commonly Used Line Codes
Polar line codes use the antipodal mapping Polar NRZ uses NRZ pulse shape Polar RZ uses RZ pulse shape

165
Where Xn is the nth data bit
Unipolar NRZ Line Code Unipolar non-return-to-zero (NRZ) line code is defined by unipolar mapping In addition, the pulse shape for unipolar NRZ is: where Tb is the bit period Where Xn is the nth data bit
 line code is defined by unipolar mapping. In addition, the pulse shape for unipolar NRZ is: where Tb is the bit period. Where Xn is the nth data bit.")
166
Bipolar Line Codes With bipolar line codes a space is mapped to zero and a mark is alternately mapped to -A and +A It is also called pseudoternary signaling or alternate mark inversion (AMI) Either RZ or NRZ pulse shape can be used
 Either RZ or NRZ pulse shape can be used.")
167
Manchester Line Codes Manchester line codes use the antipodal mapping and the following split-phase pulse shape:

168
Summary of Line Codes

170
Comparison of Line Codes
Self-synchronization Manchester codes have built in timing information because they always have a zero crossing in the center of the pulse Polar RZ codes tend to be good because the signal level always goes to zero for the second half of the pulse NRZ signals are not good for self-synchronization Error probability Polar codes perform better (are more energy efficient) than Unipolar or Bipolar codes Channel characteristics We need to find the power spectral density (PSD) of the line codes to compare the line codes in terms of the channel characteristics
 than Unipolar or Bipolar codes. Channel characteristics. We need to find the power spectral density (PSD) of the line codes to compare the line codes in terms of the channel characteristics.")
171
Comparisons of Line Codes
Different pulse shapes are used to control the spectrum of the transmitted signal (no DC value, bandwidth, etc.) guarantee transitions every symbol interval to assist in symbol timing recovery 1. Power Spectral Density of Line Codes (see Fig. 2.23, Page 90) After line coding, the pulses may be filtered or shaped to further improve there properties such as Spectral efficiency Immunity to Intersymbol Interference Distinction between Line Coding and Pulse Shaping is not easy 2. DC Component and Bandwidth DC Components Unipolar NRZ, polar NRZ, and unipolar RZ all have DC components Bipolar RZ and Manchester NRZ do not have DC components
 guarantee transitions every symbol interval to assist in symbol timing recovery. 1. Power Spectral Density of Line Codes (see Fig. 2.23, Page 90) After line coding, the pulses may be filtered or shaped to further improve there properties such as. Spectral efficiency. Immunity to Intersymbol Interference. Distinction between Line Coding and Pulse Shaping is not easy. 2. DC Component and Bandwidth. DC Components. Unipolar NRZ, polar NRZ, and unipolar RZ all have DC components. Bipolar RZ and Manchester NRZ do not have DC components.")
172
First Null Bandwidth Unipolar NRZ, polar NRZ, and bipolar all have 1st null bandwidths of Rb = 1/Tb Unipolar RZ has 1st null BW of 2Rb Manchester NRZ also has 1st null BW of 2Rb, although the spectrum becomes very low at 1.6Rb

173
Generation of Line Codes
The FIR filter realizes the different pulse shapes Baseband modulation with arbitrary pulse shapes can be detected by correlation detector matched filter detector (this is the most common detector)
")
174
Bits per PCM word and M-ary Modulation
Section 2.8.4: Bits per PCM Word and Bits per Symbol L=2l Section 2.8.5: M-ary Pulse Modulation Waveforms M = 2k Problem 2.14: The information in an analog waveform, whose maximum frequency fm=4000Hz, is to be transmitted using a 16-level PAM system. The quantization must not exceed ±1% of the peak-to-peak analog signal. (a) What is the minimum number of bits per sample or bits per PCM word that should be used in this system? (b) What is the minimum required sampling rate, and what is the resulting bit rate? (c) What is the 16-ary PAM symbol Transmission rate?
 What is the minimum number of bits per sample or bits per PCM word that should be used in this system (b) What is the minimum required sampling rate, and what is the resulting bit rate (c) What is the 16-ary PAM symbol Transmission rate")
175
Solution to Problem 2.14

Similar presentations


















>")

>")






 Data, Signal.>")

