Download presentation
Presentation is loading. Please wait.

2
You are here Three Beacon Sensor Network Localization through Self Propagation Mohit Choudhary Under Guidance of: Dr. Bhaskaran Raman

3
Sensor Network Defined Collection of communicating sensing devices. The base station is a master node. Data sensed by the network nodes sent to the base station Central processing, & rapid response collator

4
Localization in Sensor Networks Spatial localization - determining physical location of a sensor node in the network. Localization is an essential tool for: –The development of low-cost sensor networks for use in location-aware applications –Geographic routing

5
Aim of the Thesis Distributed algorithm for a sensor network localization in which nodes have the ability to assimilate and utilize the connectivity and negativity information provided by their nearby nodes. –Presence of three beacon nodes that are aware of their position apriori.

6
Problem Difficulty Often insufficient data to compute a unique position assignment for all nodes. Information itself may be erroneous due to presence of noise and gray areas Algorithm has to scale with the size of the network

7
Contribution of the Thesis A novel distributed algorithm Evaluation using simulations for a wide range of scenarios to establish an optimal conditions required to achieve effective localization with the proposed scheme. Real life experiments with in-house developed sensor nodes (based on Atmel AT89C52 microcontroller and radiometrix TX/RX)
.")
8
Related Work Use of GPS. Use of multiple static reference beacons. –Use of signal-strength estimation. –Use of acoustic ranging. –Use of connectivity information. Use of Mobile Beacon. –Expensive (cost, size, energy) –Only works outdoors, on Earth –Technology additional to the requirement of the application. –Complex setup procedures –Terrain uncertainties –Expensive –Not possible for ad hoc, sensor networks –Additional Technology –Terrain uncertainties
 –Only works outdoors, on Earth –Technology additional to the requirement of the application. –Complex setup procedures –Terrain uncertainties –Expensive –Not possible for ad hoc, sensor networks –Additional Technology –Terrain uncertainties.")
9
Specific Related Work Doherty et al. - Centralized technique using convex optimization. Bulusu et al. - Distributed algorithm based on connectivity and multiple beacons. Savarese et al.- Two-phase approach, connectivity for initial position estimates and trilateration for position refinement. (multiple beacons but less in number.) Patwari et al. - One-hop multilateration from reference nodes [received signal strength (RSS) and time of arrival (ToA)]
 Patwari et al. - One-hop multilateration from reference nodes [received signal strength (RSS) and time of arrival (ToA)].")
10
Preliminaries Connectivity based RF Localization Bounding Box - {[A, B, C, D]}.
![Preliminaries Connectivity based RF Localization Bounding Box - {[A, B, C, D]}.](http://images.slideplayer.com/11/3250468/slides/slide_10.jpg "Preliminaries Connectivity based RF Localization Bounding Box - {[A, B, C, D]}.")
11
Negativity based RF Localization Bounding Box- {[A,B,C,G](K,J)}
}](http://images.slideplayer.com/11/3250468/slides/slide_11.jpg "Negativity based RF Localization Bounding Box- {[A,B,C,G](K,J)}")
12
Localization point and Localization Error Let Bounding Box- {[B1, B2, B3, B4] (derived points)} then L P is: 1.If (segments B1B3 and B2B4 intersect) L P = point of intersection. 2.Else if (center points of both B1B3 and B2B4 lie inside the polygon) L P =center point of B1B3 or B2B4 that lies closer to the centroid of the polygon represented by {[B1,B2,B3,B4](derivedpoints)}. 3.Else L P = center point of B1B3 or B2B4 that lies inside the polygon represented by {[B1,B2,B3,B4](derivedpoints)}. The localization error, ε A - Length of the line segment ML P.
![Localization point and Localization Error Let Bounding Box- {[B1, B2, B3, B4] (derived points)} then L P is: 1.If (segments B1B3 and B2B4 intersect) L P = point of intersection.](http://images.slideplayer.com/11/3250468/slides/slide_12.jpg "2.Else if (center points of both B1B3 and B2B4 lie inside the polygon) L P =center point of B1B3 or B2B4 that lies closer to the centroid of the polygon represented by {[B1,B2,B3,B4](derivedpoints)}. 3.Else L P = center point of B1B3 or B2B4 that lies inside the polygon represented by {[B1,B2,B3,B4](derivedpoints)}. The localization error, ε A - Length of the line segment ML P..")
13
Proposed Algorithm- Terminology Beacons- Know their position apriori. Non-Beacon- Location unknown at start. Unique Node-ID – NID Message ID - MID –MID=1 is used by beacon nodes. –MID=2 is used by pseudo-beacon nodes. –MID=3 is used by other nodes. Negativity constraint set (NCS) – A set of negativity constraints, each consisting of a 3- tuple (NID, a, b). Message transmitted - A 5-tuple (NID, a, b, MID, NCS).
 – A set of negativity constraints, each consisting of a 3- tuple (NID, a, b). Message transmitted - A 5-tuple (NID, a, b, MID, NCS)..")
14
Proposed Algorithm-Example Run B2B2 B3B3 B1B1 A E XF Y Step-1: Beacon nodes transmit their location. We assume that there is at least one other node which can hear all three beacons. A node which hears all three beacon nodes is termed as a pseudo-beacon node. Step-2: In the second stage, the pseudo-beacon localizes itself, and transmits its location to its neighbours. This transmission includes the negativity constraint of all the three beacon nodes. For this reason, this transmission is very expressive. Step-2 (contd.): Nodes which hear a transmission from a pseudo-beacon thus immediately localize themselves.
: Nodes which hear a transmission from a pseudo-beacon thus immediately localize themselves..")
15
Valid Set of Messages A set of threshold number of messages of MID=3, with the same x and y values, but different NID’s constitutes a valid set. These different messages would be sent by different non-beacon nodes which localize themselves to the same point. Also, a single message with MID=1 constitutes a valid set.

16
Example Run Contd. A E X F Y X1X1 X2X2 X3X3 X4X4 Step-3: In the third stage, the algorithm proceeds in a distributed fashion. Nodes which have localized themselves transmit their location to their neighbours, along with any negativity constraints as appropriate. This in turn helps in the localization of further nodes. Threshold = 1Threshold = 2 Let us assume X1, X2, X3 and X4 are the nodes in region E

17
Tuning In our simulations, we have found that the use of threshold=2 usually works well. A node which does not receive two valid sets of messages, but only one valid set, temporarily localizes itself with just this information and sends a message. On receiving the second set, it further refines its position, and sends a second message announcing this information.

18
Sources of Error Possible There is error inherent in the connectivity- based and negativity-based constraints. A negative constraint may be false, due to non-receipt of a valid message The presence of gray areas and non- uniform radio connectivity can cause further errors in calculations. Some nodes which are "far away" from other nodes may not receive enough information to localize themselves.

19
Simulation Setup Platform- Visual Sense that builds on and leverages Ptolemy II. Two sets of simulations for various region of operation. –TX radius of 30mts/ node –TX radius of 50mts/ node Study the effect of varying the value of threshold(1,2 or 3) in each case. Nodes within a localization error of 20% of transmission range turn green, those within 10% turn red.
 in each case. Nodes within a localization error of 20% of transmission range turn green, those within 10% turn red..")
20
Example Simulation Run

21
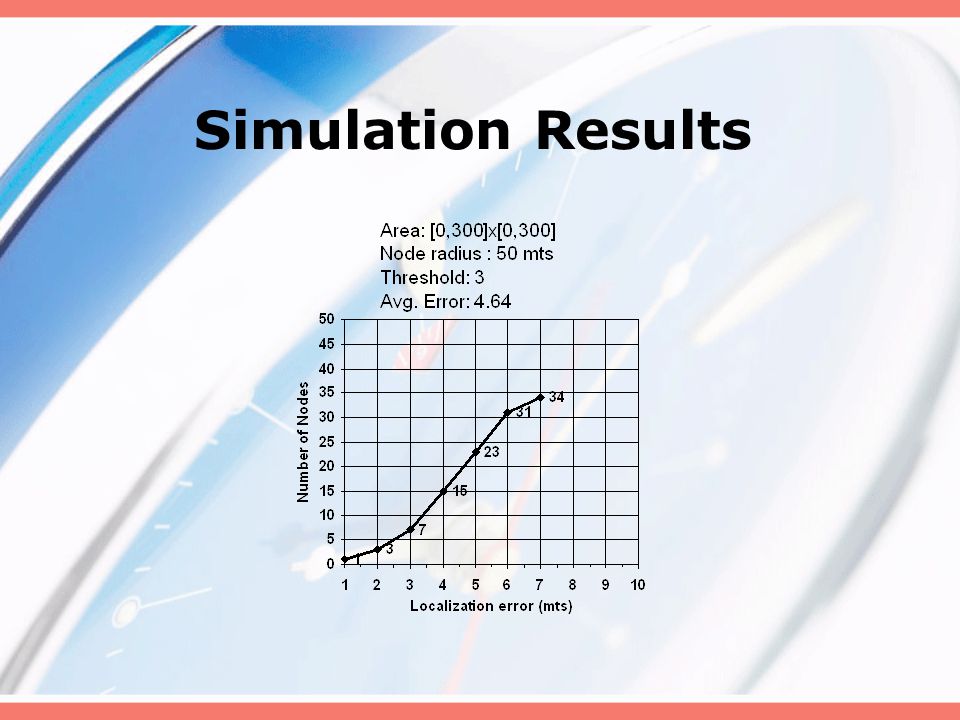
Simulation Results

24
Factors Node Density (Number of Nodes deployed / Region of Operation) Node TX Range Value of Threshold We define: Coverage=(Node Density) x (Node Tx Range)
 Node TX Range Value of Threshold We define: Coverage=(Node Density) x (Node Tx Range)")
25
Compiled Simulation Results Node TX Radius ThresholdRegion of Operation Coverage% of Nodes localized Avg. Localization Error 30 1[0,120]x[0,120] 9.8125 726.0 2[0,120]x[0,120]825.6 3[0,120]x[0,120]1003.9 1[0,180]x[0,180] 4.36 825.022 2[0,180]x[0,180]983.97 3[0,180]x[0,180]743.81 1[0,240]x[0,240] 2.452 545.206 2[0,240]x[0,240]325.17 50 1[0,200]x[0,200] 9.8125 828.44 2[0,200]x[0,200]867.06 3[0,200]x[0,200]1005.437 1[0,300]x[0,300] 4.358 867.306 2[0,300]x[0,300]985.469 3[0,300]x[0,300]684.64 1[0,400]x[0,400] 2.452 587.096 2[0,400]x[0,400]385.952

26
Analysis Coverage ≈ 4.36 Value of threshold=2 is good both in terms of percentage of nodes localized and the Avg. Localization error. We now put forward the following questions that we aim to answer: –How well does the algorithm scale with increased area of operation? –Can the algorithm be used in harsh environments such as indoors considering the multipath effect and gray areas produced in RF communication? –What is the effect of unreliable communication on the proposed scheme and what are the measures needed to ensure reliability in communication?

27
Large Area of Operation Total nodes : 555Total Nodes: 272 94% nodes localize

28
Gray areas and multipath effect Zhao J et al. “Understanding Packet Delivery Performance in Dense Wireless Sensor Networks.” –Extent of gray areas is less for lower transmission ranges. –Extent of gray areas varies greatly with the environment (indoor, out door, habitat) even for the same transmission range. –For a given transmission range the extent of gray area is the maximum for indoor. –the extent –of gray areas in indoor environment measures up to 1/3 rd of the transmission range.
 even for the same transmission range. –For a given transmission range the extent of gray area is the maximum for indoor. –the extent –of gray areas in indoor environment measures up to 1/3 rd of the transmission range..")
29
Gray areas and Multipath effect

30
Effect of unreliable communication Probability of transmission error : 0.2 Number of Retransmissions/ node: 1

31
Experiment Setup Area of operation of [0,100] X [0,100] Sensor nodes are made up of onboard: – Atmel AT89C52 microcontroller. – A radiometrix BiM-433-F radio TX/RX. operating at 433 MHz frequency. –A voltage stabilization circuit. –A 9V battery.
![Experiment Setup Area of operation of [0,100] X [0,100] Sensor nodes are made up of onboard: – Atmel AT89C52 microcontroller.](http://images.slideplayer.com/11/3250468/slides/slide_31.jpg "– A radiometrix BiM-433-F radio TX/RX. operating at 433 MHz frequency. –A voltage stabilization circuit. –A 9V battery..")
32
Block Diagram

33
Features: 1)Maximum Data Rate: 40 kbps. 2)Frequency: 433 MHz. 3)Output power: 6 dBm, Receiver sensitivity: -107dBm. 4)Rapid RX power up ( <1ms ) 5)Simple UART interface
Output power: 6 dBm, Receiver sensitivity: -107dBm. 4)Rapid RX power up ( <1ms ) 5)Simple UART interface.")
34
Features –8K Bytes of In-System Reprogrammable Flash Memory –Endurance: 1,000 Write/Erase Cycles –256 x 8-bit Internal RAM –32 Programmable I/O Lines –Three 16-bit Timer/Counters –Eight Interrupt Sources –Programmable Serial Channel –Low-power Idle and Power-down Modes –One Serial Interface

35
Circuit Diagram

36
Communication Protocol Details Microcontrollers configured to communicate with the radio in UART mode 1 at 9600 Bauds. Microcontroller used to select the radio to transmit or receive. CD (carrier detect) of the radio is connected to INT0 to decide changeover. Byte Transfer UART Mode 1
 of the radio is connected to INT0 to decide changeover. Byte Transfer UART Mode 1.")
37
Packet Structure Preamble: 3ms Preamble mandatory for the receiver in the radiometrix chip to stabilize. Control: We used a unique Byte pattern (0xAA) to indicate the start of message Data: The data as used in the actual implementation is as shown in Figure6.4. CRC: 16 Bit Checksum of control - data fields has been used by the decoder to verify the integrity of the packet.
 to indicate the start of message Data: The data as used in the actual implementation is as shown in Figure6.4. CRC: 16 Bit Checksum of control - data fields has been used by the decoder to verify the integrity of the packet..")
38
Spatial Profile

39
Experiment Setup The experiment setup has been considered keeping in mind the results obtained after simulation (Coverage = 4.358), Threshold=2 Coverage= [(Node density) X (TX Area / Node)] For the transmission radius of 30 meters following node density is desired Node Density = 4.358/ (3.14x30x30) Node Density = 0.00154 Thus, for area of 10,000 sq meters (100x100), the number of nodes required would be Number of nodes required = (Node density) x (Area) Number of nodes = 0.00154 x 10000 Number of nodes = 15.4
![Experiment Setup The experiment setup has been considered keeping in mind the results obtained after simulation (Coverage = 4.358), Threshold=2 Coverage= [(Node density) X (TX Area / Node)] For the transmission radius of 30 meters following node density is desired Node Density = 4.358/ (3.14x30x30) Node Density = Thus, for area of 10,000 sq meters (100x100), the number of nodes required would be Number of nodes required = (Node density) x (Area) Number of nodes = x Number of nodes = 15.4](http://images.slideplayer.com/11/3250468/slides/slide_39.jpg "Experiment Setup The experiment setup has been considered keeping in mind the results obtained after simulation (Coverage = 4.358), Threshold=2 Coverage= [(Node density) X (TX Area / Node)] For the transmission radius of 30 meters following node density is desired Node Density = 4.358/ (3.14x30x30) Node Density = Thus, for area of 10,000 sq meters (100x100), the number of nodes required would be Number of nodes required = (Node density) x (Area) Number of nodes = x Number of nodes = 15.4")
40
Experiment Details Four sensor nodes available. Requirement of 15 nodes and three beacons. Technique of rotating the nodes that had once achieved localization.

41
Experiment Results Total nodes: 15

42
Conclusions Proposed method of localization is a complete and reliable process in itself. Applications based on sensor networks requiring reasonable localization accuracy can effectively utilize the proposed method to cut down on additional cost of localization otherwise incurred. As a few numbers of nodes in each region localize to a common point by the proposed method, this information can be further utilized by the applications to either perform power management by utilizing a very small number of such nodes at one time or perform easy clustering of all such nodes.

43
Future Work Analyzing the effect of using other radio models such as a octagon instead of a square on the proposed scheme. Attempt to extend the methodology to 3D networks. On the hardware level as a first step attempt to integrate the developed node with temperature sensors in form of DS 1631 (Dallas semiconductor digital thermometer chip). As a second step attempt to integrate RF-id reader to the node as onboard sensor.
. As a second step attempt to integrate RF-id reader to the node as onboard sensor..")
44
Thank you

Similar presentations