Download presentation
Presentation is loading. Please wait.

1
Multidimensional Lightcuts Bruce Walter Adam Arbree Kavita Bala Donald P. Greenberg Program of Computer Graphics, Cornell University

2
Problem Simulate complex, expensive phenomena –Complex illumination –Anti-aliasing –Motion blur –Participating media –Depth of field

3
Problem Simulate complex, expensive phenomena –Complex illumination –Anti-aliasing –Motion blur –Participating media –Depth of field

4
Problem Simulate complex, expensive phenomena –Complex illumination –Anti-aliasing –Motion blur –Participating media –Depth of field

5
Problem Complex integrals over multiple dimensions –Requires many samples camera

6
Multidimensional Lightcuts New unified rendering solution –Solves all integrals simultaneously –Accurate –Scalable

7
Related Work Motion blur –Separable [eg, Korein & Badler 83, Catmull 84, Cook 87, Sung 02] –Qualitative [eg, Max & Lerner 85, Wloka & Zeleznik 96, Myszkowski et al. 00, Tawara et al. 04] –Surveys [Sung et al. 02, Damez et al. 03] Volumetric –Approximate [eg, Premoze et al. 04, Sun et al. 05] –Survey [Cerezo et al. 05] Monte Carlo –Photon mapping [Jensen & Christensen 98, Cammarano & Jensen 02] –Bidirectional [Lafortune & Willems 93, Bekaert et al. 02, Havran et al. 03] –Metropolis [Veach & Guibas 97, Pauly et al. 00, Cline et al. 05]
![Related Work Motion blur –Separable [eg, Korein & Badler 83, Catmull 84, Cook 87, Sung 02] –Qualitative [eg, Max & Lerner 85, Wloka & Zeleznik 96, Myszkowski et al.](http://images.slideplayer.com/11/3246227/slides/slide_7.jpg "00, Tawara et al. 04] –Surveys [Sung et al. 02, Damez et al. 03] Volumetric –Approximate [eg, Premoze et al. 04, Sun et al. 05] –Survey [Cerezo et al. 05] Monte Carlo –Photon mapping [Jensen & Christensen 98, Cammarano & Jensen 02] –Bidirectional [Lafortune & Willems 93, Bekaert et al. 02, Havran et al. 03] –Metropolis [Veach & Guibas 97, Pauly et al. 00, Cline et al. 05].")
8
Related Work Lightcuts (SIGGRAPH 2005) –Scalable solution for complex illumination –Area lights –Sun/sky –HDR env maps –Indirect illumination Millions of lights hundreds of shadow rays –But only illumination at a single point
 –Scalable solution for complex illumination –Area lights –Sun/sky –HDR env maps –Indirect illumination Millions of lights hundreds of shadow rays –But only illumination at a single point")
9
Insight Holistic approach –Solve the complete pixel integral –Rather than solving each integral individually

10
Direct only (relative cost 1x)Direct+Indirect (1.3x) Direct+Indirect+Volume (1.8x)Direct+Indirect+Volume+Motion (2.2x)
Direct+Indirect (1.3x) Direct+Indirect+Volume (1.8x)Direct+Indirect+Volume+Motion (2.2x)")
11
Camera Discretize full integral into 2 point sets –Light points ( L ) –Gather points ( G ) Point Sets Light points
 –Gather points ( G ) Point Sets Light points")
12
Camera Discretize full integral into 2 point sets –Light points ( L ) –Gather points ( G ) Point Sets Light points
 –Gather points ( G ) Point Sets Light points")
13
Camera Discretize full integral into 2 point sets –Light points ( L ) –Gather points ( G ) Point Sets Light points Pixel Gather points
 –Gather points ( G ) Point Sets Light points Pixel Gather points")
14
Discretize full integral into 2 point sets –Light points ( L ) –Gather points ( G ) Point Sets Light points Gather points
 –Gather points ( G ) Point Sets Light points Gather points")
15
Discrete Equation Material term Pixel = S j M ji G ji V ji I i ( j,i) G x L Geometric term Visibility term Light intensity Gather strength Sum over all pairs of gather and light points –Can be billions of pairs per pixel
 G x L Geometric term Visibility term Light intensity Gather strength Sum over all pairs of gather and light points –Can be billions of pairs per pixel")
16
Key Concepts Unified representation –Pairs of gather and light points Hierarchy of clusters –The product graph Adaptive partitioning (cut) –Cluster approximation –Cluster error bounds –Perceptual metric (Weber’s law)
 –Cluster approximation –Cluster error bounds –Perceptual metric (Weber’s law)")
17
Product Graph Explicit hierarchy would be too expensive –Up to billions of pairs per pixel Use implicit hierarchy –Cartesian product of two trees (gather & light)
")
18
Light tree Gather tree Product Graph L0 L1 L2 L3 L4 L5 L6 G1 G0 G2 L0 L1L2 L3 G0 G1

19
Product Graph Light tree Gather tree X = L0 L1 L2 L3 L4 L5 L6 G1 G0 G2 G1 G0 G2 L0L4L1L6L2L5L3 Product Graph

20
Light tree Gather tree X = L0 L1 L2 L3 L4 L5 L6 G1 G0 G2 G1 G0 G2 L0L4L1L6L2L5L3 Product Graph

21
G1 G0 G2 L0L4L1L6L2L5L3 Product Graph

22
G1 G0 G2 L0L4L1L6L2L5L3 Product Graph

23
Light tree Gather tree X = L0 L1 L2 L3 L4 L5 L6 G1 G0 G2 G1 G0 G2 L0L4L1L6L2L5L3 Product Graph

24
Cluster Representatives

26
Collapse cluster-cluster interactions to point-cluster –Minkowski sums –Reuse bounds from Lightcuts Compute maximum over multiple BRDFs –Rasterize into cube-maps More details in the paper Error Bounds

27
Algorithm Summary Once per image –Create lights and light tree For each pixel –Create gather points and gather tree for pixel –Adaptively refine clusters in product graph until all cluster errors < perceptual metric

28
L6 G2 L1L2L3L4L5L0 G1 G0 Start with a coarse cut –Eg, source node of product graph Algorithm Summary

29
L6 G2 L1L2L3L4L5L0 G1 G0 Choose node with largest error bound & refine –In gather or light tree Algorithm Summary

30
L6 G2 L1L2L3L4L5L0 G1 G0 Choose node with largest error bound & refine –In gather or light tree Algorithm Summary

31
L6 G2 L1L2L3L4L5L0 G1 G0 Repeat process Algorithm Summary

32
L6 G2 L1L2L3L4L5L0 G1 G0 Until all clusters errors < perceptual metric –2% of pixel value (Weber’s law) Algorithm Summary
 Algorithm Summary")
33
Results Limitations –Some types of paths not included Eg, caustics –Prototype only supports diffuse, Phong, and Ward materials and isotropic media

34
Roulette 7,047,430 Pairs per pixel Time 590 secs Avg cut size 174 (0.002%)
")
35
Roulette

36
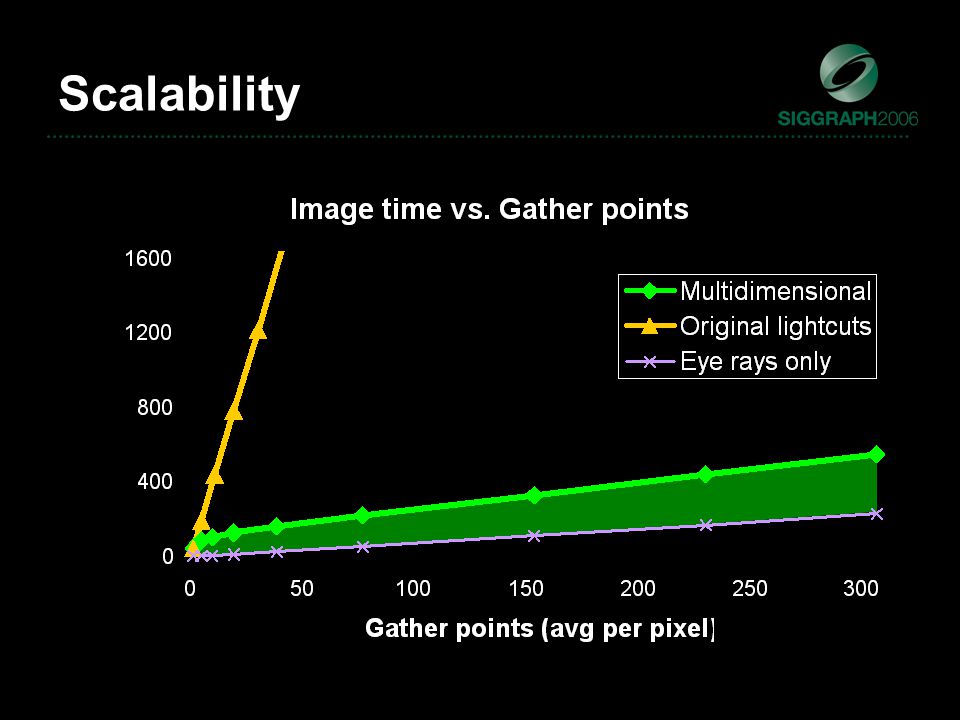
Scalability

38
Metropolis Comparison Our result Time 9.8min Metropolis Time 148min (15x) Visible noise 5% brighter (caustics etc.) Zoomed insets
 Visible noise 5% brighter (caustics etc.) Zoomed insets")
39
Kitchen 5,518,900 Pairs per pixel Time 705 secs Avg cut size 936 (0.017%)
")
40
Kitchen

41
Tableau

42
Temple

43
Conclusions New rendering algorithm –Unified handling of complex effects Motion blur, participating media, depth of field etc. –Product graph Implicit hierarchy over billions of pairs –Scalable & accurate

44
Future Work Other types of paths –Caustics, etc. Bounds for more functions –More materials and media types Better perceptual metrics Adaptive point generation

45
Acknowledgements National Science Foundation grants ACI-0205438 and CCF-0539996 Intel corporation for support and equipment The modelers –Kitchen: Jeremiah Fairbanks –Temple: Veronica Sundstedt, Patrick Ledda, and the graphics group at University of Bristol –Stanford and Georgia Tech for Buddha and Horse geometry

46
The End Questions?

47
Multidimensional Lightcuts Bruce Walter Adam Arbree Kavita Bala Donald P. Greenberg Program of Computer Graphics, Cornell University

48
L0 L1 L2 L3 L4L5 L6 G1 G0 G2 Exists at first or second time instant. L0 L1 L2 L3 L2 L1 L2 G1 L1 L0 G0 G1 G0 Light TreeGather Tree Representatives

49
Lightcuts key concepts Unified representation –Convert all lights to points Hierarchy of clusters –The light tree Adaptive cut –Partitions lights into clusters Cut Light Tree Lights

50
180 Gather points X 13,000 Lights = 234,000 Pairs per pixel Avg cut size 447 (0.19%)
")
51
114,149,280 Pairs per pixel Avg cut size 821 Time 1740 secs

52
Types of Point Lights Omni –Spherical lights Oriented –Area lights, indirect lights Directional –HDR env maps, sun&sky

Similar presentations








 Miloš Hašan.>")




 COMS 4162, Lectures 18, 19: Monte Carlo Integration Ravi Ramamoorthi Acknowledgements.>")


 Fabio Pellacini (Dartmouth College) Kavita Bala (Cornell University)>")


 Fabio Pellacini (Dartmouth College) Kavita Bala (Cornell University)>")
