Download presentation
Presentation is loading. Please wait.

1
Continuous Estimation in WLAN Positioning By Tilen Ma Clarence Fung

2
Objective Area-Based Probability (ABP) Continuous Space Estimation(CSE) –Center of Mass –Time-Averaging Point Mapping Conclusion
 Continuous Space Estimation(CSE) –Center of Mass –Time-Averaging Point Mapping Conclusion")
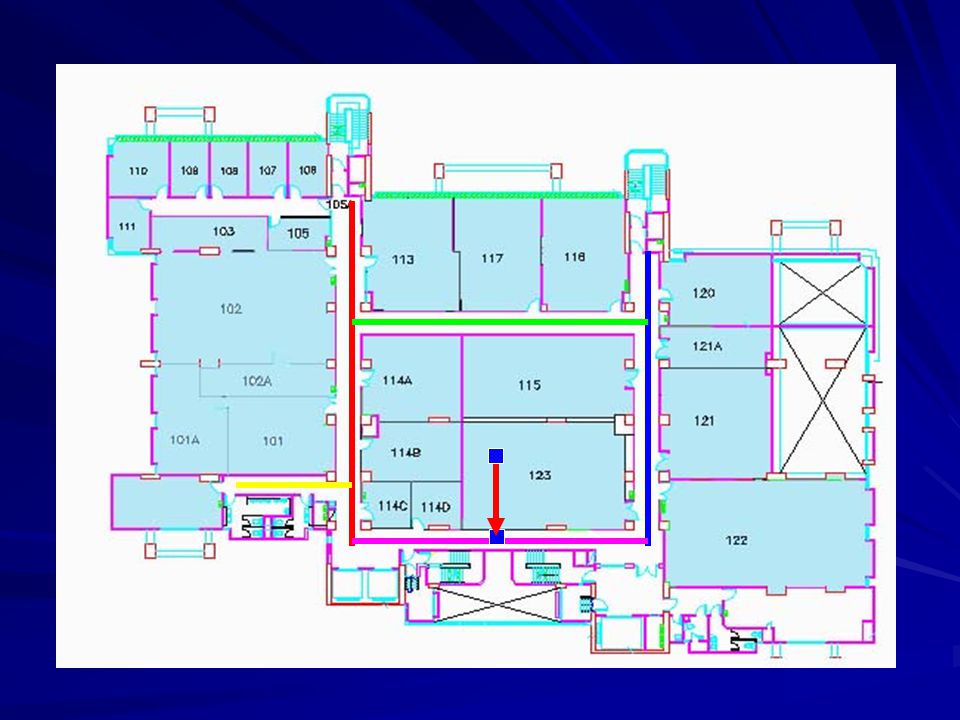
3
Applying Area-based Approach

4
Area-Based Probability (ABP) Advantages: Presents the user an understanding of the system in a more natural and intuitive manner High accuracy More mathematical approach
 Advantages: Presents the user an understanding of the system in a more natural and intuitive manner High accuracy More mathematical approach")
5
Steps in using ABP Decide the Areas Measure Signals at Different Areas Create a Training Set Measure Signals at Current Position Create a Testing Set Find out the Probability of Being at Different Areas Calculate Probability Density Return the Area with Highest Probability

6
Area Based Probability We compute P(S t |A i ) for every area A i,i=1…m, using the Gaussian assumption Finding Probability Density –the object must be at one of the 12 areas –ΣP(Ai | St) =1 for all i Max{P(A i |S t ) } = Max{c*P(S t |A i ) } = Max{P(S t |A i ) } = Max{P(S t |A i ) } Return the area A i with top probability
 for every area A i,i=1…m, using the Gaussian assumption Finding Probability Density –the object must be at one of the 12 areas –ΣP(Ai | St) =1 for all i Max{P(A i |S t ) } = Max{c*P(S t |A i ) } = Max{P(S t |A i ) } = Max{P(S t |A i ) } Return the area A i with top probability")
7
Applying Area-based Approach There are two approach to estimate position: –Discrete Space Estimation –Continuous Space Estimation

8
Discrete Space Estimation Limitation Only one of the discrete locations in the training set is returned Cannot return the intermediate locations Low accuracy Not desirable for location-based application. Eg. Tour guide

9
Introduction to CSE Continuous Space Estimation Advantage: –Return locations may or may not be in the training set –Higher accuracy –Suitable for mobile application Two techniques: –Center of Mass –Time-Averaging

10
Center of Mass Assume n locations Treat each location in the training set as an object Each object has a weight equals to its probability density Obtain Center of Mass of n objects using their weighted positions

11
Center of Mass Let p(i) be the probability of a location x i, i=1,2 …n Let Y be the set of locations in 2D space and Y(i) is the corresponding position of x i The Center of Mass is given by: The Center of Mass is given by:
 be the probability of a location x i, i=1,2 …n Let Y be the set of locations in 2D space and Y(i) is the corresponding position of x i The Center of Mass is given by: The Center of Mass is given by:")
12
Center of Mass

13
Example

14
Time-Averaging Use a time-average window to smooth the resulting location estimated Obtain the result location by averaging the last W locations estimated by discrete- space estimator

15
Time-Averaging Given a stream of location estimates x 1,x 2,…,x t The current location x c is estimated by

16
Time-Averaging

17
Problem with CSE Locations in training set Estimated position

18
Point Mapping Goal : Map the result to the closest point in the set of all possible locations Step 1: Divide the corridor into several line segments L i

20
Step 2: We define each line segment L i by an equation: P = P i1 + u i (P i2 – P i1 ) –P i1 (x i1,y i1 ) is the starting point of L i –P i2 (x i2,y i2 ) is the end point of L i
 –P i1 (x i1,y i1 ) is the starting point of L i –P i2 (x i2,y i2 ) is the end point of L i")
21
Let the point E(x e,y e ) be the estimated point Let I i be the point of intersection between L i (P i1 P i2 ) and the line at the tangent to L i passing through E
 be the estimated point Let I i be the point of intersection between L i (P i1 P i2 ) and the line at the tangent to L i passing through E")
22
Step 3: Finding the distances D i between the estimated point E and L i for all i the dot product of the tangent and L i is 0, thus (E - I i ) dot (P i2 – P i1 ) = 0 (E - I i ) dot (P i2 – P i1 ) = 0 Solving this we have,
 dot (P i2 – P i1 ) = 0 (E - I i ) dot (P i2 – P i1 ) = 0 Solving this we have,")
23
Substituting u i into the equation of L i gives the point of intersection I i as x = x i1 + u i (x i2 – x i1 ) y = y i1 + u i (y i2 – y i1 ) D i is equal the distance between I i and E
 y = y i1 + u i (y i2 – y i1 ) D i is equal the distance between I i and E")
24
Step 4:check if I i lies in the line segment L i i.e. u i lies between 0 and 1 Step 5: Return I i lying in L i and with smallest D i

26
Conclusion Continuous Space Estimation solves the limitation in Discrete Space Estimation Continuous Space Estimation improves the accuracy in determining position Point Mapping overcome out of bound problem in CSE Point Mapping overcome out of bound problem in CSE

27
THE END

Similar presentations




















 by R. O. Duda, P. E. Hart and D. G. Stork, John Wiley.>")