Download presentation
Presentation is loading. Please wait.

1
TRACKING THE INVISIBLE: LEARNING WHERE THE OBJECT MIGHT BE Helmut Grabner1, Jiri Matas2, Luc Van Gool1,3, Philippe Cattin4 1ETH-Zurich, 2Czech Technical University, Prague, 3K.U. Leuven, 4University of Basel

2
Outline 1. Introduction 2. Learning the Motion Couplings 3. Practical Implementation 4. Experimental Results 5. Conclusion

3
Outline 1. Introduction

4
Introduction Goal: Estimate the Position of an Object

5
Introduction Many temporary, but potential very strong links exists between a tracked object and parts of the images. We discover the dynamic elements – called SUPPORTERS – that predict the position of the target. [L. Cerman, J. Matas, J., V. Hlavac, Sputnik Tracker,SCIA, 2009] [M. Yang, Y. Wu, G. Hua. Context-Aware Visual Tracking PAMI, 2009]

6
SUPPORTERS 1. Came with different strength. 2. Change over time. SUPPORTERS help Tracking of objects which change there appearance very quickly and occluded objects or object outside the image.

7
Tracking Carl Given the position of the object of interest in the frame. Local image features from the whole image are extracted (yellow points). Image features: our implementation uses Harris points [5] and describe them by a SIFT inspired descriptor [10].
. Image features: our implementation uses Harris points [5] and describe them by a SIFT inspired descriptor [10]..")
8
Local Image Features as Supporters These image features are usually divided into object points and points belonging to the background.

9
Local Image Features as Supporters Object points lie on the object surface and thus always have a strong correlation to the object motion (green points)
")
10
Local Image Features as Supporters The object gets occluded or changed its appearance, the supporters can help infer its position.

11
Discovering the Supporters

12
Outline 2. Learning the Motion Couplings

13
Problem Formulation We want to learn a model of P(x|I), predicting the position x of an object in the image I.
, predicting the position x of an object in the image I.")
14
Implicit Shape Model - Features After training from a large database of labeled images, the model can be used to detect objects from that object class in test images. indicator functions P(f|I)
.")
15
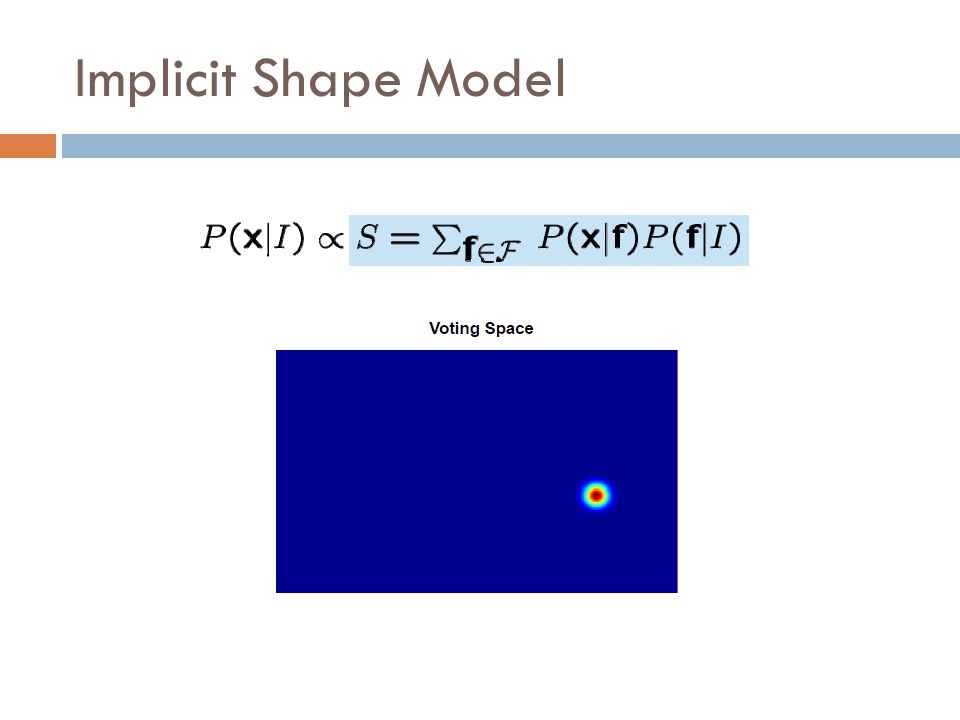
Implicit Shape Model – Object Displacement Each feature subsequently casts probabilistic votes for possible object positions, where the hypothesis score is obtained as a sum over all votes. P(x|f):votes for the object position x.
:votes for the object position x..")
16
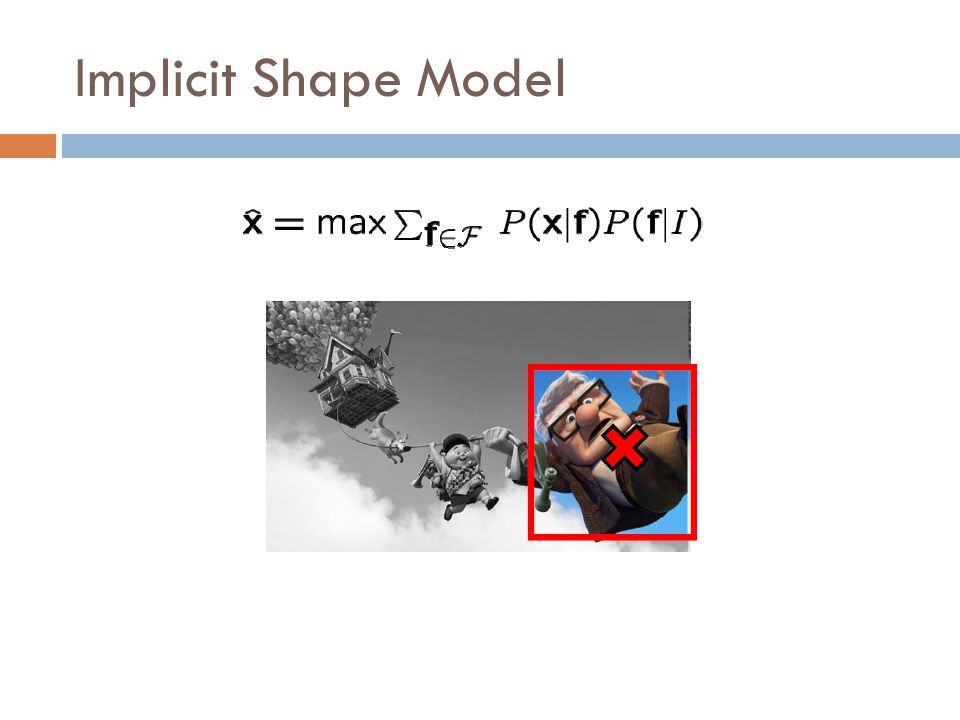
Implicit Shape Model

19
Model of Carl – Object Detection

20
Model of Supporters

21
Voting Where μ is the mean and Σ is the covariance matrix.

22
Reliable Information & Motion Coupling feature point x(i) = (x(i), y(i)) associated with a feature f(i) and the position x* = (x*, y*) of the target. where parameter α ϵ [0, 1] determines the weighting of the past estimates. The current image It and the object position Xt* is included using p(f|It), the indicator of feature f in the current image; and p(Xt*-Xt(i)|f), the current relative object position.
, the indicator of feature f in the current image; and p(Xt*-Xt(i)|f), the current relative object position..")
23
Implementation angle Ф distance r covariance matrix Σ S tore all detected feature points in a database DB. The entries (d,r, Ф, Σ ) store the descriptor and the estimated voting vector, encoded by radius, angle and covariance matrix.
 store the descriptor and the estimated voting vector, encoded by radius, angle and covariance matrix..")
24
Updates Adjust the voting vector, the radius r and the relative angle Ф Update the covariance matrix Σ

25
Outline 3. Practical Implementation

26
Algorithm : Determination of Position

27
Outline 4. Experimental Results

28
ETH-Cup: Supporters

29
[11] S. Stalder, H. Grabner, and L. V. Gool. Beyond semisupervised tracking: Tracking should be as simple as detection,but not simpler than recognition. In Proc. IEEE WS on On-line Learning for Computer Vision, 2009.
![[11] S. Stalder, H. Grabner, and L. V. Gool.](http://images.slideplayer.com/9/2625142/slides/slide_29.jpg "Beyond semisupervised tracking: Tracking should be as simple as detection,but not simpler than recognition. In Proc. IEEE WS on On-line Learning for Computer Vision,")
30
Experimental Results

31
ETH-Cup: Improving Object Tracking Recall: TP/(TP+FN) Precision: TP/(TP+FP)
 Precision: TP/(TP+FP) ")
32
Medical Application (a) Manually labeled valve positions, (b-f) the found valve positions in 5 cardiac phases. As the confidence of the voting space was too low, in cardiac phase 16, the valve positions were interpolated (indicated by the dotted lines) from neighboring images.
 from neighboring images..")
33
Outline 5. Conclusion

34
Conclusion SUPPORTERS help Tracking of objects which 1.Change there appearance very quickly. 2.Occluded objects or object outside the image.

Similar presentations



 Reporter :鄒嘉恆 Date : 10/06/2009.>")




:747-757, Aug 2000.>")










