Download presentation
Presentation is loading. Please wait.

1
06/04/2017 Basic principles of numerical radiation hydrodynamics and the RALEF code M. M. Basko Slide 1: GSI 2014 Keldysh Institute of Applied Mathematics, Moscow, Russia ELI, Prague 10 July 2014

2
Main constituents of the RALEF-2D package
06/04/2017 Main constituents of the RALEF-2D package The RALEF-2D code has been developed with the primary goal to simulate high-temperature laser plasmas. Its principal constituent blocks are Hydrodynamics Thermal conduction Radiation transport EOS and opacities Laser absorption Slide 2: GSI 2014

3
Equations of hydrodynamics
06/04/2017 Equations of hydrodynamics The RALEF-2D code is based on a one-fluid, one-temperature hydrodynamics model in two spatial dimensions (either x,y, or r,z): ideal hydrodynamics Slide 2: ILE 2010 – energy deposition by thermal conduction (local), – energy deposition by radiation (non-local), – eventual external heat sources.
: ideal hydrodynamics. Slide 2: ILE – energy deposition by thermal conduction (local), – energy deposition by radiation (non-local), – eventual external heat sources.")
4
Selection of principal dependent variables
Illustration with the 1D planar example: Divergent form: ρ, ρu, ρE Non-divergent form: ρ, u, e Naturally leads to a conservative numerical scheme Easier to avoid unphysical values of the internal energy e and temperature T RALEF

5
Selection of principal independent variables
Divergent Eulerian form: t, x Non-divergent Lagrangian form: t, m Eulerian simulation: spatial mesh in x,y,z is fixed in time. Lagrangian simulation: Lagrangian mesh in m=∫ρdx is “attached” to the fluid; typically, the simulation time is severely limited by mesh “collapse”.

6
The ALE technique (adaptive mesh)
The Arbitrary Lagrangian-Eulerian approach allows free motion of the x,y,z mesh – independent of the motion of the fluid! Implementation in RALEF: every time step consists of 2 substeps: a purely Lagrangian step – the mesh is “attached” to the fluid, followed by a rezoning step, where a completely new x,y,z mesh is constructed, and the principal dynamic variables are remapped to the new mesh. At substep 2, a new mesh is constructed by solving the Dirichlet problem for a separate Poisson-like differential equation with a user-defined weight function. In RALEF, there are quite a number of user-accessible parameters for control over the mesh dynamics – which is often the most tricky part of a successful simulation!

7
Mesh topology in RALEF Mesh geometry: Cartesian (x,y)
06/04/2017 Mesh topology in RALEF Computational mesh consists of blocks with common borders. Each block is topologically equivalent to a rectangle. Common block faces have equal number of cells. Mesh geometry: Cartesian (x,y) cylindrical (r,z) Slide 8: ILE 2010 Mesh library: Different mesh options, distinguished by the value of variable igeom, are combined into a mesh library, which is being continuously expanded.
 cylindrical (r,z) Slide 8: ILE Mesh library: Different mesh options, distinguished by the value of variable igeom, are combined into a mesh library, which is being continuously expanded.")
8
Computational mesh: block structure
06/04/2017 Computational mesh: block structure Every block can be subdivided into np1np2 topologically rectangular parts; different parts can be composed of different materials. Slide 9: ILE 2010

9
RALEF: the ALE technique in action
06/04/2017 RALEF: the ALE technique in action Ncyc = 1 Ncyc = 100 Slide 11: ILE 2010

10
Limitations of the ALE technique
Example: laser irradiation of a Cu foil t = 1.6 ns fixed-pressure boundary Cu foil laser Simulation stops because a singularity develops at the plasma-vacuum boundary !

11
Boundary conditions To obtain a particular solution of the hydrodynamics equations, we need to define the initial state, and to impose certain boundary conditions. The initial state is conceptually simple and fully free to be set by the user: either equilibrium or non-equilibrium. Setting up a physically consistent and computationally efficient combination of boundary conditions is a considerably more complex task (requires basic understanding of hydrodynamics and some physical intuition). Basic types of boundary conditions in RALEF: reflective (symmetry) boundary (fixed in space → Eulerian) prescribed pressure (moves in space → Lagrangian) prescribed velocity (moves in space → Lagrangian) free outflow (fixed in space → Eulerian) prescribed inflow (fixed in space → Eulerian) Additional degree of freedom: the boundary conditions and the ALE mode can be changed at will at any time during the simulation.
. Basic types of boundary conditions in RALEF: reflective (symmetry) boundary (fixed in space → Eulerian) prescribed pressure (moves in space → Lagrangian) prescribed velocity (moves in space → Lagrangian) free outflow (fixed in space → Eulerian) prescribed inflow (fixed in space → Eulerian) Additional degree of freedom: the boundary conditions and the ALE mode can be changed at will at any time during the simulation.")
12
Laser irradiation of a thin Sn disk
free-outflow boundary reflective (symmetry) boundary
 boundary.")
13
Different materials By finding an appropriate combination of boundary conditions and ALE options, one can adequately simulate practically any 2D problem with a single material. Multiple materials pose an additional challenge: In RALEF, mixing of different materials within a single mesh cell is not allowed hence, any material interface must be treated as a Lagrangian curve, which usually tends to get tangled: as a result, the simulation stops. Al Sn

14
Equation of state For ideal hydrodynamics (without thermal conduction, viscosity, etc) we need an equation of state in the form RALEF can easily accommodate any thermodynamically stable EOS. However, because the principal variable is E=e+u2/2 rather than e (or T), the numerical scheme is not positive with respect to T sporadic appearance of negative temperatures! An additional conceptual difficulty arises for a van-der-Waals type of EOS in the region of liquid-vapor phase coexistence – i.e. below the binodal, where we have two different branches of the same EOS: a metastable branch, and an absolutely stable equilibrium branch, obtained by means of Maxwell construction. This latter problem has not been resolved yet !
, the numerical scheme is not positive with respect to T sporadic appearance of negative temperatures! An additional conceptual difficulty arises for a van-der-Waals type of EOS in the region of liquid-vapor phase coexistence – i.e. below the binodal, where we have two different branches of the same EOS: a metastable branch, and. an absolutely stable equilibrium branch, obtained by means of Maxwell construction. This latter problem has not been resolved yet !")
15
Implicit and explicit numerical hydrodynamics
Explicit scheme Implicit scheme Implicit schemes are numerically stable and allow large time steps, but are difficult to implement. Numerical stability of explicit schemes requires the Courant–Friedrichs–Lewy condition (CFL condition) to be fulfilled which for certain problems may incur prohibitively long computing times. RALEF has explicit hydrodynamics, i.e. is oriented on simulating fast processes.
 to be fulfilled. which for certain problems may incur prohibitively long computing times. RALEF has explicit hydrodynamics, i.e. is oriented on simulating fast processes.")
16
Numerical scheme for hydrodynamics
06/04/2017 Numerical scheme for hydrodynamics The numerical scheme for the 2D hydrodynamics is built upon the CAVEAT-2D (LANL, 1990) hydrodynamics package and has the following properties: it uses cell-centered principal variables on a multi-block structured quadrilateral mesh (either in the x-y or r-z geometry); is fully conservative and belongs to the class of second-order Godunov schemes (no artificial viscosity is needed); the mesh is adapted to the hydrodynamic flow by applying the ALE (arbitrary Lagrangian-Eulerian) technique; the numerical method is based on a fast non-iterative Riemann solver (J.K.Dukowicz, 1985), well adapted for handling arbitrary equations of state. Slide 7: ILE 2010
 hydrodynamics package and has the following properties: it uses cell-centered principal variables on a multi-block structured quadrilateral mesh (either in the x-y or r-z geometry); is fully conservative and belongs to the class of second-order Godunov schemes (no artificial viscosity is needed); the mesh is adapted to the hydrodynamic flow by applying the ALE (arbitrary Lagrangian-Eulerian) technique; the numerical method is based on a fast non-iterative Riemann solver (J.K.Dukowicz, 1985), well adapted for handling arbitrary equations of state. Slide 7: ILE")
17
The Godunov numerical method
06/04/2017 The Godunov numerical method Principal variables: i, ui, Ei ― all assigned to the cell centers ! Equation of state: Lagrangian phase: the Riemann problem is solved at each cell face fluxes F of momentum u and total energy E new ui(t+dt) and Ei(t+dt) ; mass is conserved. Slide 10: ILE 2010 ← 1st order A fast non-iterative Riemann solver by J.K.Dukowicz (1985) is used. No artificial viscosity is needed ! A “snag”: node velocities uvi !
 and Ei(t+dt) ; mass is conserved. Slide 10: ILE ← 1st order. A fast non-iterative Riemann solver by J.K.Dukowicz (1985) is used. No artificial viscosity is needed ! A snag : node velocities uvi !")
18
Importance of the 2-nd order + ALE
06/04/2017 Importance of the 2-nd order + ALE Non-linear stage of the Rayleigh-Taylor instability of a laser-irradiated thin carbon foil RALEF: 1-st order RALEF: 2-nd order Slide 12: ILE 2010

19
(a test bed for radiation transport)
06/04/2017 Thermal conduction (a test bed for radiation transport) Slide 17: ILE 2010
 Slide 17: ILE")
20
Equations of hydrodynamics
06/04/2017 Equations of hydrodynamics The newly developed RALEF-2D code is based on a one-fluid, one-temperature hydrodynamics model in two spatial dimensions (either x,y, or r,z): Slide 2: ILE 2010 – energy deposition by thermal conduction (local), – energy deposition by radiation (non-local), – eventual external heat sources.
: Slide 2: ILE – energy deposition by thermal conduction (local), – energy deposition by radiation (non-local), – eventual external heat sources.")
21
Implicit versus explicit algorithms for conduction
Explicit scheme Fully implicit scheme An explicit scheme is stable under the condition , which practically always incurs prohibitively long computing times. A fully implicit scheme is always stable but requires iterative solution – which can be implemented for thermal conduction, but becomes absolutely unrealistic for radiation transport. Symmetric semi-implicit (SSI) scheme RALEF is based on the SSI algorithm for both the thermal conduction and radiation transport.
 scheme. RALEF is based on the SSI algorithm for both the thermal conduction and radiation transport.")
22
The SSI method for thermal conduction
06/04/2017 The SSI method for thermal conduction The key ingredient to the RALEF-2D code is the SSI (symmetric semi-implicit) method of E.Livne & A.Glasner (1985), used to incorporate thermal conduction and radiation transport into the 2D Godunov method (in order to avoid costly matrix inversion required by fully implicit methods). The numerical scheme for thermal conduction (M.Basko, J.Maruhn & A.Tauschwitz, J.Com.Phys., 228, 2175, 2009) has the following features: it uses cell-centered temperatures from the FVD (finite volume discretization) hydrodynamics on distorted quadrilateral grids, is fully conservative (based on intercellular fluxes with an SSI energy correction for the next time step), (almost) unconditionally stable, space second-order accurate on all grids for smooth , symmetric on a local 9-point stencil, computationally efficient. Slide 18: ILE 2010
 method of E.Livne & A.Glasner (1985), used to incorporate thermal conduction and radiation transport into the 2D Godunov method (in order to avoid costly matrix inversion required by fully implicit methods). The numerical scheme for thermal conduction (M.Basko, J.Maruhn & A.Tauschwitz, J.Com.Phys., 228, 2175, 2009) has the following features: it uses cell-centered temperatures from the FVD (finite volume discretization) hydrodynamics on distorted quadrilateral grids, is fully conservative (based on intercellular fluxes with an SSI energy correction for the next time step), (almost) unconditionally stable, space second-order accurate on all grids for smooth , symmetric on a local 9-point stencil, computationally efficient. Slide 18: ILE")
23
Time step control in the SSI method
06/04/2017 Time step control in the SSI method Constraints on t are based on usual approximation-accuracy considerations, but here we need two separate criteria with two control parameters: Slide 24: ILE 2010 Ts is a problem-specific sensitivity threshold for temperature variations.

24
Test problems: linear steady-state solutions
06/04/2017 Test problems: linear steady-state solutions Time convergence to the steady state The linear solution is reproduced exactly on all grids, unless special constraints to ensure positiveness are imposed on strongly distorted grids. Slide 25: ILE 2010 For sufficiently large time steps t, the SSI method does not converge to the steady-state solution an indication of its conditional stability (neutral for large t). Piecewise linear solutions with -jumps are reproduced exactly only with harmonic mean f,ij , and only on rectangular grids.
. Piecewise linear solutions with -jumps are reproduced exactly only with harmonic mean f,ij , and only on rectangular grids.")
25
Test problems: non-linear wave into a cold wall
06/04/2017 Test problems: non-linear wave into a cold wall Parameters: Square grid 100x100 Initial condition: Boundary condition: Solution: Slide 26: ILE 2010 Test results: This solution cannot be simulated with the harmonic-mean f , whereas excellent results are obtained with the arithmetic-mean f : the front position is reproduced with an error of 0.1% for . Temperature in all cells

26
Standard grids for test problems
06/04/2017 Standard grids for test problems Only the Kershaw grid is strongly distorted in the sense that some of the coefficients (1)(1) become negative. Slide 27: ILE 2010
(1) become negative. Slide 27: ILE")
27
Test problems: non-linear steady-state solution
06/04/2017 Test problems: non-linear steady-state solution Here we test against a steady-state solution of the form with the source term Slide 28: ILE 2010 Our scheme clearly demonstrates the 2nd order convergence rate on all grids, and is no less accurate than the best published schemes of Morel et al. (1992), Shashkov et al. (1996), Breil & Maire (2007).
, Shashkov et al. (1996), Breil & Maire (2007).")
28
06/04/2017 Radiation transport Slide 33: ILE 2010

29
Equations of hydrodynamics
06/04/2017 Equations of hydrodynamics The newly developed RALEF-2D code is based on a one-fluid, one-temperature hydrodynamics model in two spatial dimensions (either x,y, or r,z): Slide 2: ILE 2010 – energy deposition by thermal conduction (local), – energy deposition by radiation (non-local), – eventual external heat sources.
: Slide 2: ILE – energy deposition by thermal conduction (local), – energy deposition by radiation (non-local), – eventual external heat sources.")
30
06/04/2017 Radiation transport Transfer equation for radiation intensity I in the quasi-static approximation (the limit of c → ): Quasi-static approximation: radiation transports energy infinitely fast (compared to the fluid motion) the energy residing in radiation field at any given time is infinitely small ! Slide 3: ILE 2010 In the present version, the absorption coefficient k and the source function B = B(T) are calculated in the LTE approximation. Coupling with the fluid energy equation: Radiation transport adds 3 extra dimensions (two angles and the photon frequency) the 2D hydrodynamics becomes a 5D radiation hydrodynamics !
 the energy residing in radiation field at any given time is infinitely small ! Slide 3: ILE In the present version, the absorption coefficient k and the source function B = B(T) are calculated in the LTE approximation. Coupling with the fluid energy equation: Radiation transport adds 3 extra dimensions (two angles and the photon frequency) the 2D hydrodynamics becomes a 5D radiation hydrodynamics !")
31
Not to be mixed up with spectral multi-group diffusion
06/04/2017 Not to be mixed up with spectral multi-group diffusion In many cases the term “radiation hydrodynamics” (RH) is applied to hydrodynamic equations augmented with the multi-frequency diffusion equation for the spectral radiation energy density ; the coupling term to the fluid is Slide 4 : GSI 2013 Here the information about the angular dependence of the radiation field is lost; one simply has to solve some 30 – 100 additional mutually independent diffusion equations. Not much of a challenge for computational physics: there already exist numerically stable, positive and conservative numerical schemes on distorted (non-rectangular) grids. In the RALEF code we have such a scheme implemented for the thermal conduction.
 is applied to hydrodynamic equations augmented with the multi-frequency diffusion equation. for the spectral radiation energy density ; the coupling term to the fluid is. Slide 4 : GSI Here the information about the angular dependence of the radiation field is lost; one simply has to solve some 30 – 100 additional mutually independent diffusion equations. Not much of a challenge for computational physics: there already exist numerically stable, positive and conservative numerical schemes on distorted (non-rectangular) grids. In the RALEF code we have such a scheme implemented for the thermal conduction.")
32
Challenges for computational RH
06/04/2017 Challenges for computational RH Ideally, the numerical scheme for solving the radiation transfer equation must possess the following important properties: it must be positive in the sense that non-negative boundary values of Iν guarantee Iν ≥ 0 at all collocation points ― provided that Bν ≥ 0 ; it must be conservative in the sense that both locally and globally the finite- difference equivalent of the Gauss theorem is fulfilled, Slide 6: GSI 2013 it must reproduce the diffusion limit on arbitrary quadrilateral (or triangular) grids in optically thick regions ― especially when the optical thickness of individual grid cells becomes >> 1 a high-order accuracy scheme is needed. The difficulty of constructing such a scheme has been recognized early in the theory of neutron transport: K.D.Lathrop, J.Comp.Phys., 4 (1969) 475. To the best of our knowledge, no such scheme is known in the open literature.
 grids in optically thick regions ― especially when the optical thickness of individual grid cells becomes >> 1 a high-order accuracy scheme is needed. The difficulty of constructing such a scheme has been recognized early in the theory of neutron transport: K.D.Lathrop, J.Comp.Phys., 4 (1969) 475. To the best of our knowledge, no such scheme is known in the open literature.")
33
Calculation of Iν: the method of short characteristics
06/04/2017 Calculation of Iν: the method of short characteristics angular directions are discretized by using the Sn method with n(n+2) fixed photon propagation directions over the 4π solid angle; for each angular direction and frequency , the radiation field I is found by solving the transfer equation with the method of short characteristics (A.Dedner, P.Vollmöller, JCP, 178, 263, 2002). Mesh nodes are chosen as collocation points for the radiation intensity I . Slide 36: ILE 2010 Advantages: even on strongly distorted meshes, it is guaranteed that light rays pass through each mesh cell; the algorithm is generally computationally more efficient than that with long characteristics. Disadvantages: a significant amount of numerical diffusion in space.
 fixed photon propagation directions over the 4π solid angle; for each angular direction and frequency , the radiation field I is found by solving the transfer equation. with the method of short characteristics (A.Dedner, P.Vollmöller, JCP, 178, 263, 2002). Mesh nodes are chosen as collocation points for the radiation intensity I . Slide 36: ILE Advantages: even on strongly distorted meshes, it is guaranteed that light rays pass through each mesh cell; the algorithm is generally computationally more efficient than that with long characteristics. Disadvantages: a significant amount of numerical diffusion in space.")
34
Conservativeness: flux conservation in vacuum
06/04/2017 Conservativeness: flux conservation in vacuum Consider a scheme where the radiation intensity is assigned to mesh vertices. Consider one cell with a negligibly small absorption (k 0): In our example on the left we have Slide 7: GSI 2013 Conclusion: a numerical scheme based on nodal collocation points is generally non-conservative ! Conservativeness can be restored by assigning the intensity I to cell faces (R.Ramis, 1992) ― equivalent to using the fluxes H as independent variables But then the high-order of finite-difference approximation, needed for the diffusion limit, is lost !
: In our example on the left we have. Slide 7: GSI Conclusion: a numerical scheme based on nodal collocation points is generally non-conservative ! Conservativeness can be restored by assigning the intensity I to cell faces (R.Ramis, 1992) ― equivalent to using the fluxes H as independent variables. But then the high-order of finite-difference approximation, needed for the diffusion limit, is lost !")
35
The diffusion limit k >> | ln T|, | ln |, | ln k |
06/04/2017 The diffusion limit The diffusion limit is the limit of k >> | ln T|, | ln |, | ln k | In this limit we can apply the asymptotic expansion: Slide 8: GSI 2013 In the quasi-static LTE case the diffusion limit is equivalent to the approximation of radiative thermal conduction:

36
Heating by two opposite beamlets in the diffusion limit
06/04/2017 Heating by two opposite beamlets in the diffusion limit Consider two opposite beamlets propagating along an infinitely thin column h: In the diffusion limit we have Slide 9: GSI 2013 Having combined the two opposite beams, we get Conclusion: our finite-difference scheme must correctly reproduce the 2nd spatial derivatives of the unknown function Iν – i.e. to be of high order accuracy ! The latter is a major challenge for non-rectangular grids in 2 and 3 dimensions – and especially so when the cell optical thickness Δτ >> 1 !

37
Achievements Failures
06/04/2017 Achievements We have developed an original numerical scheme for radiation transport which is strictly positive, from the practical point of view ― reproduces the diffusion limit with a fair degree of accuracy on not too strongly distorted meshes, works robustly in both (x,y) and (r,z) geometries. Slide 11: GSI 2013 Failures Our numerical scheme is not conservative (violates the finite-difference version of the Gauss theorem), and has no strict convergence in the diffusion limit.
 and (r,z) geometries. Slide 11: GSI Failures. Our numerical scheme. is not conservative (violates the finite-difference version of the Gauss theorem), and. has no strict convergence in the diffusion limit.")
38
Radiation transport: test problems

39
Numerical diffusion: a searchlight beam in vacuum
06/04/2017 Numerical diffusion: a searchlight beam in vacuum The short-characteristic method produces a significant amount of numerical diffusion for light beams with sharp edges. Slide 40: ILE 2010 For thermal radiation a certain amount of numerical diffusion may be more an advantage than a drawback.

40
Test problems: radiative cooling of a slab
06/04/2017 Test problems: radiative cooling of a slab Computational mesh: Exact solution: Slide 41: ILE 2010 Convergence of the Sn method S2 S4 S6 S8 S12 error L2 23% 7.6% 2.3% 1.9% 1.15% Typical accuracy in problems with optically thin mesh cells is 12%.

41
Diffusion limit in a slab
06/04/2017 Diffusion limit in a slab Slide 15: GSI 2013 No convergence, the error level depends on the level of mesh distortion.

42
Test “fireball” (the limit of radiative heat conduction)
06/04/2017 Test “fireball” (the limit of radiative heat conduction) Consider an initially hot unit sphere with T0 = 1 and k = 100/T. Propagation of a radial heat wave is governed by the conduction equation which admits an analytical self-similar solution with the front position Slide 16: GSI 2013
 Consider an initially hot unit sphere with T0 = 1 and k = 100/T. Propagation of a radial heat wave is governed by the conduction equation. which admits an analytical self-similar solution with the front position. Slide 16: GSI")
43
Fireball expansion in xy-geometry
06/04/2017 Fireball expansion in xy-geometry By t = the exact position of the front must be at r = 1.5. Slide 17: GSI 2013

44
Final state: the conduction solution
06/04/2017 Final state: the conduction solution By t = the exact position of the front must be at r = 1.5. Slide 18: GSI 2013

45
Final state: the transport solution with k0 = 100
06/04/2017 Final state: the transport solution with k0 = 100 Slide 19: GSI 2013 From practical point of view, in this particular case we observe a slow convergence to the exact diffusion solution.

46
Final state: the transport solution with cell = 10
06/04/2017 Final state: the transport solution with cell = 10 Slide 20: GSI 2013 In this example we observe no convergence to the exact diffusion solution. Numerical energy “leak” is 40% !

47
SN method: the “ray effect”
06/04/2017 SN method: the “ray effect” Consider radiation transport from a central “hot” rod across a vacuum cavity. S6 Slide 43: ILE 2010 Convergence of the Sn method R2/R1=4 S6 S12 S24 S48 S96 error max/min 41% 18% 6.8% 1.9% 0.47% error L2 15% 8.5% 2.4% 0.52% 0.23%

48
06/04/2017 Opacities Slide 44: ILE 2010

49
Opacity options in RALEF-2D
06/04/2017 Opacity options in RALEF-2D Here we profit from many years of a highly qualified work at KIAM (Moscow) in the group of Nikiforov-Uvarov-Novikov (the THERMOS code based on the Hartree-Fock-Slater atomic modeling). Opacity options: power law, ad hoc analytical, inverse bremsstrahlung (analytical), Slide 47: ILE 2010 GLT tables (source opacities from Novikov)
 in the group of Nikiforov-Uvarov-Novikov (the THERMOS code based on the Hartree-Fock-Slater atomic modeling). Opacity options: power law, ad hoc analytical, inverse bremsstrahlung (analytical), Slide 47: ILE GLT tables (source opacities from Novikov)")
50
Laser absorption in RALEF-2D
Present model: An arbitrary number of monochromatic cylindrical laser beams is allowed: for every beam the transfer equation is solved by the same method of short characteristics as for thermal radiation. No refraction, no reflection, the inverse bremsstrahlung absorption coefficient, artificially enhanced absorption beyond the critical surface.

51
Illustrative problems
06/04/2017 Illustrative problems Slide 44: ILE 2010

52
Ring-Gaussian spatial profile Temporal profile (normalized)
06/04/2017 Importance of radiation transport for laser plasmas r CO2 laser Sn foil: Δzfoil = 0.42 µm, Rfoil = 75 μm, Rmesh = 120 μm. Peak absorbed laser flux: F00 = 1.41010 W/cm2 z Sn foil Ring-Gaussian spatial profile (normalized) Temporal profile (normalized)
 Temporal profile (normalized)")
53
No radiative transfer: thermal conduction only
06/04/2017 No radiative transfer: thermal conduction only Slide 44: ILE 2010

60
Radiation transport: S8 with 8 spectral groups

67
Irradiation by a short (20ps) YAG ( = 1.064 μm) pulse
06/04/2017 Irradiation by a short (20ps) YAG ( = μm) pulse Sn microsphere: RSn = 17 μm, Rmesh = 150 μm. laser Nominal laser energy: Elas-absorbed = 1 mJ (reflection ignored) z Absorbed laser energy: Elas-absorbed = 0.4 mJ 0.6 mJ missed the target Slide 9: GSI-2009 Gaussian temporal profile (normalized) Gaussian spatial profile (normalized)
 YAG ( = μm) pulse. Sn microsphere: RSn = 17 μm, Rmesh = 150 μm. laser. Nominal laser energy: Elas-absorbed = 1 mJ. (reflection ignored) z. Absorbed laser energy: Elas-absorbed = 0.4 mJ. 0.6 mJ missed the target. Slide 9: GSI Gaussian temporal profile (normalized) Gaussian spatial profile (normalized)")
74
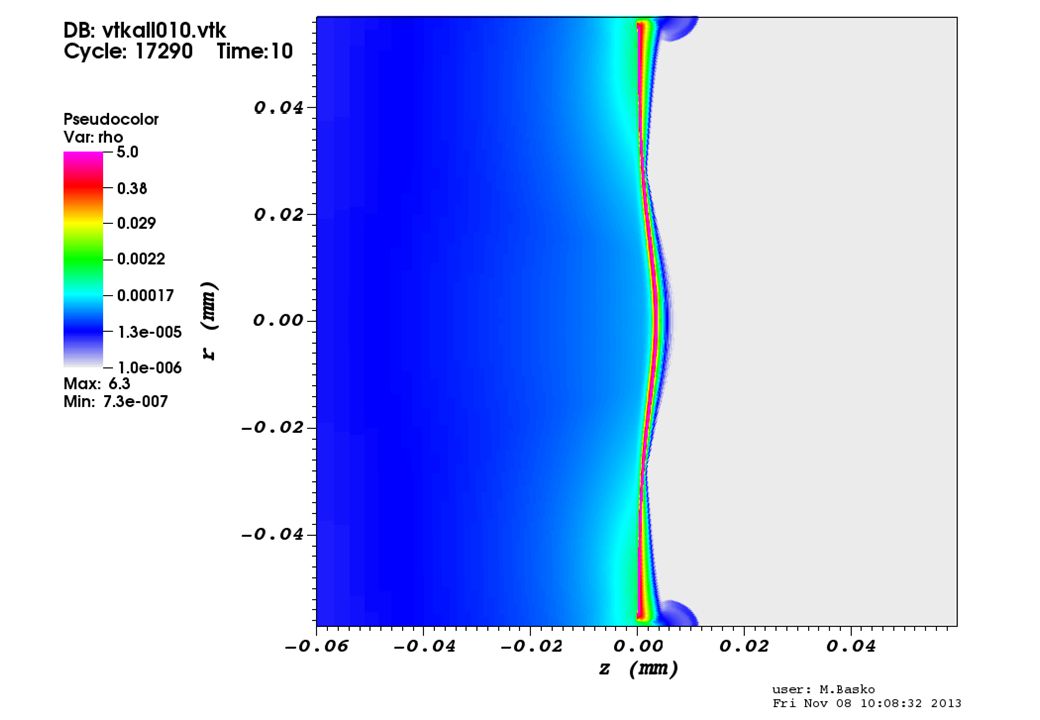
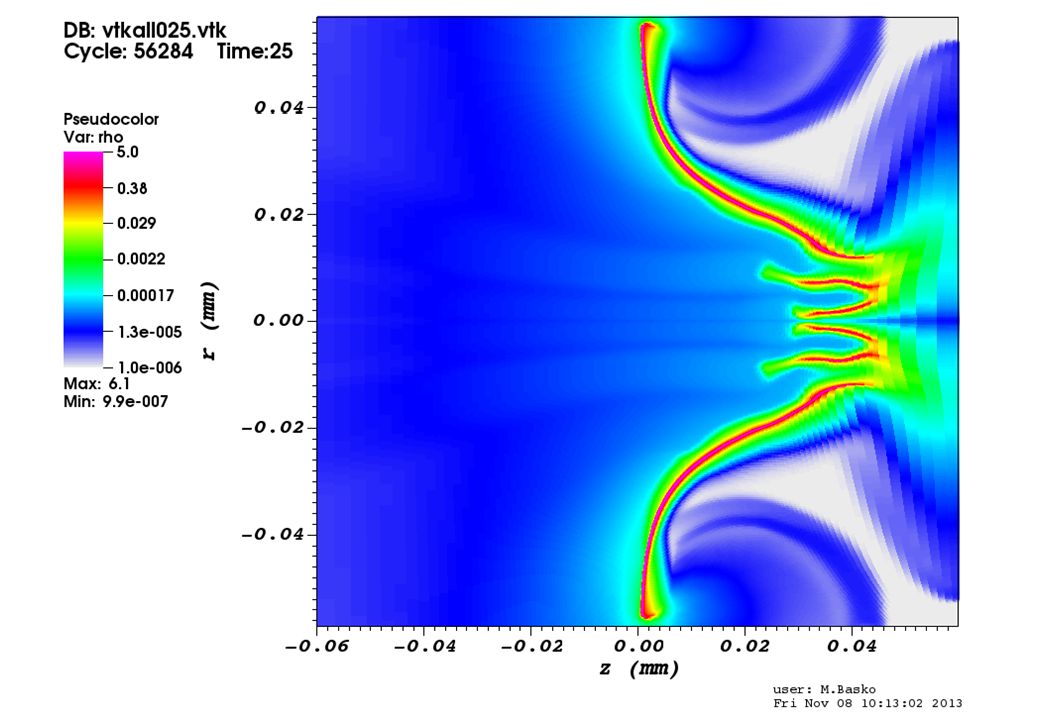
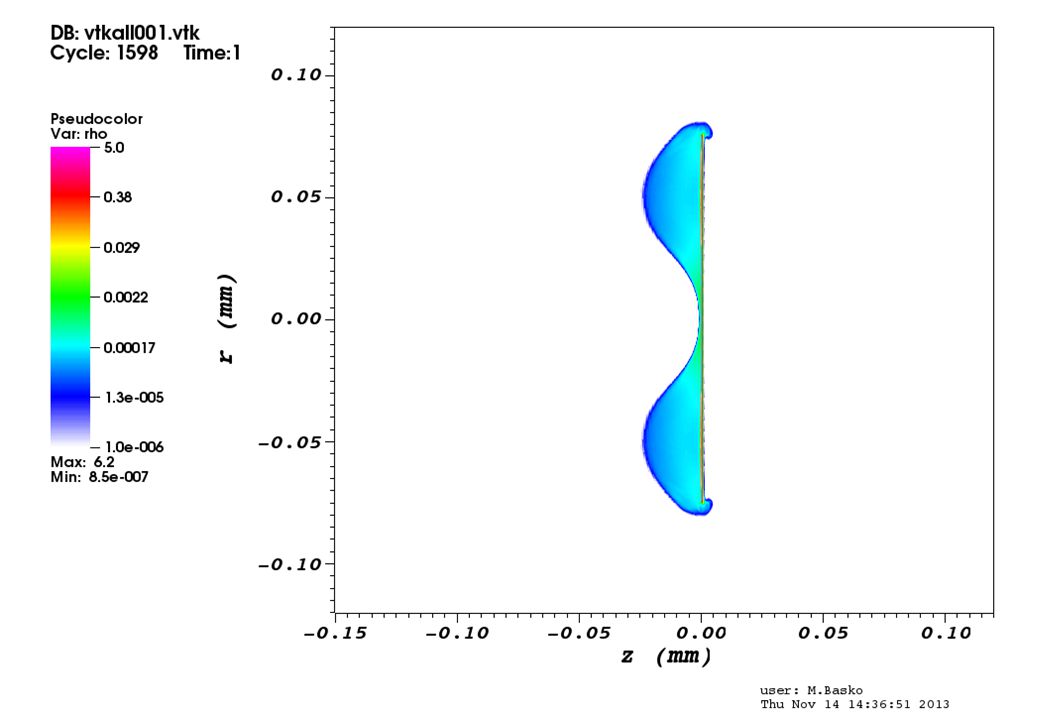
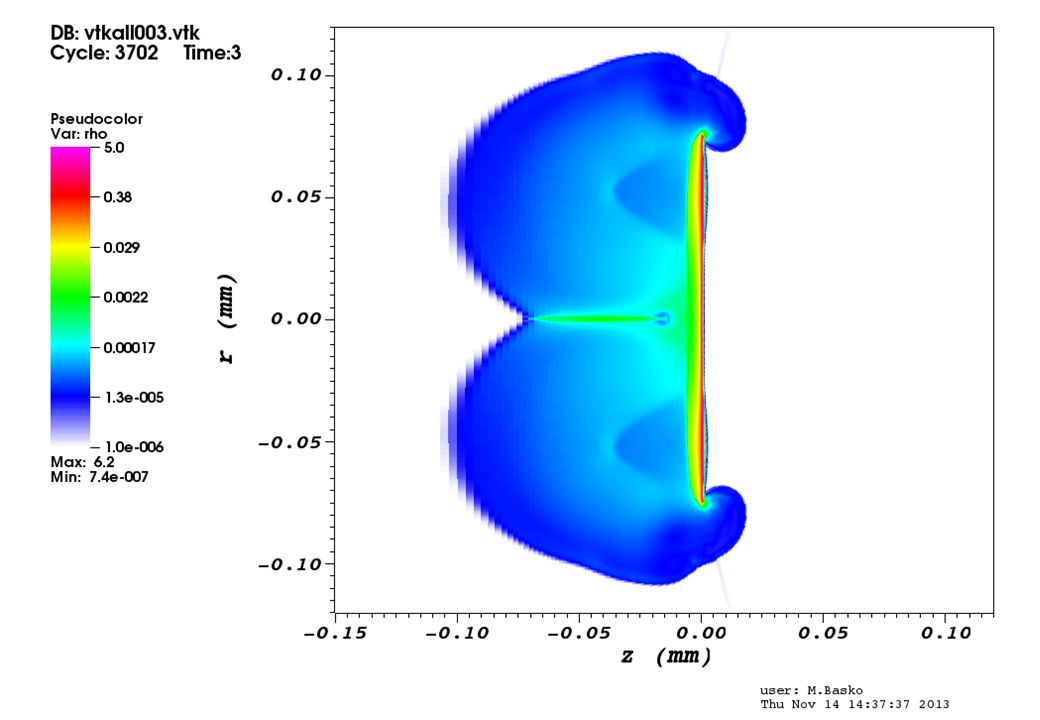
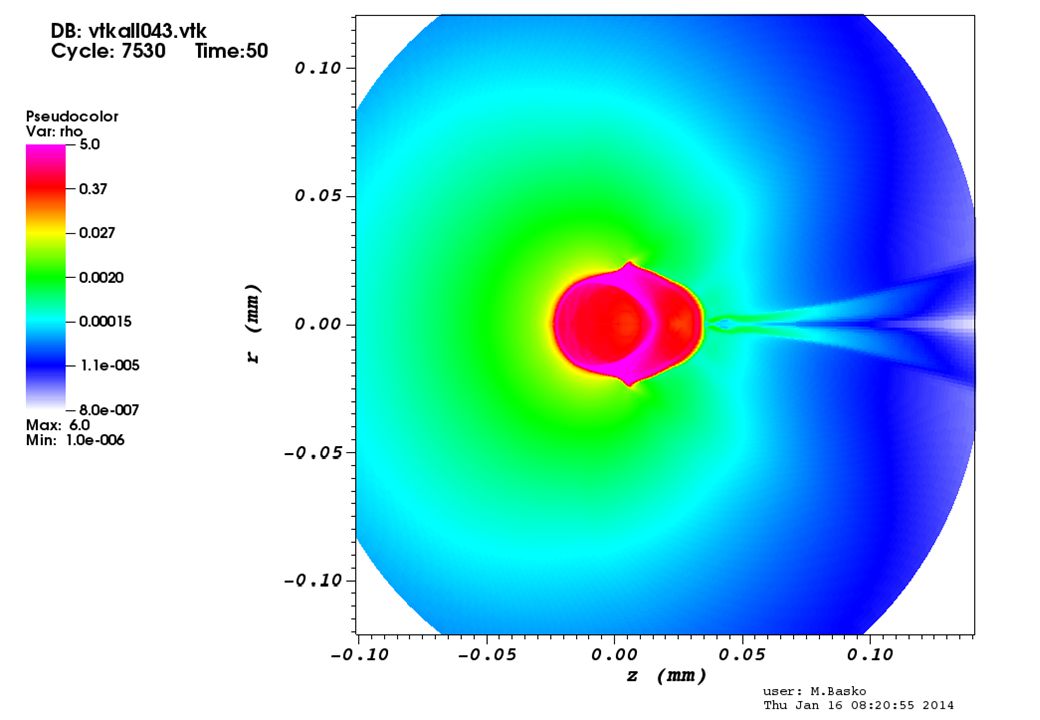
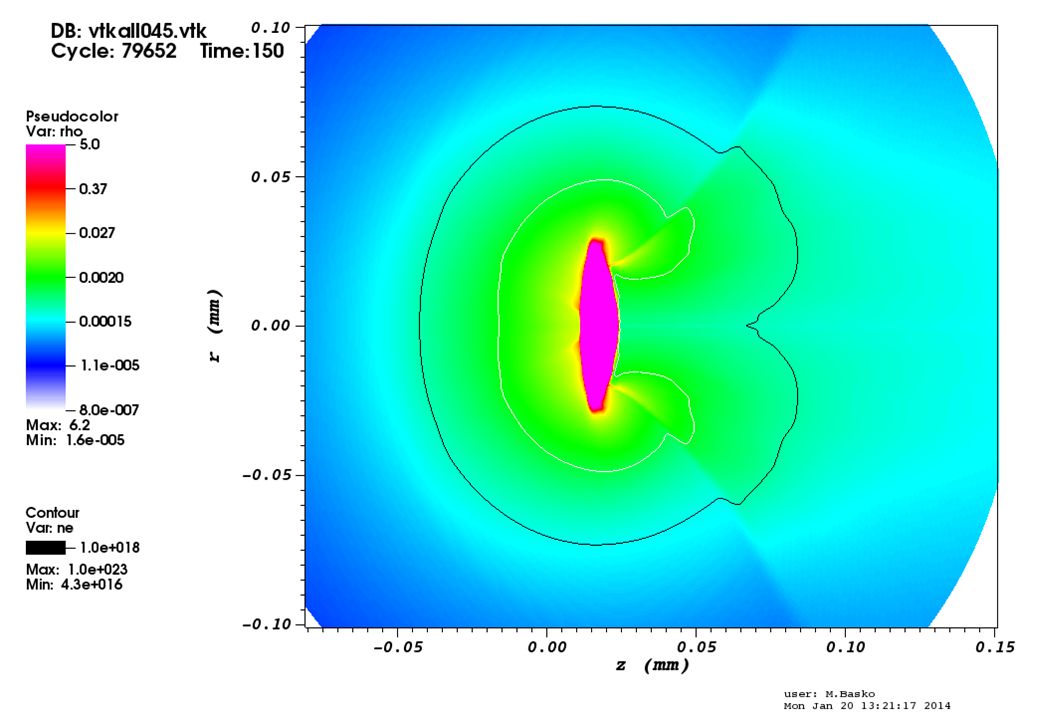
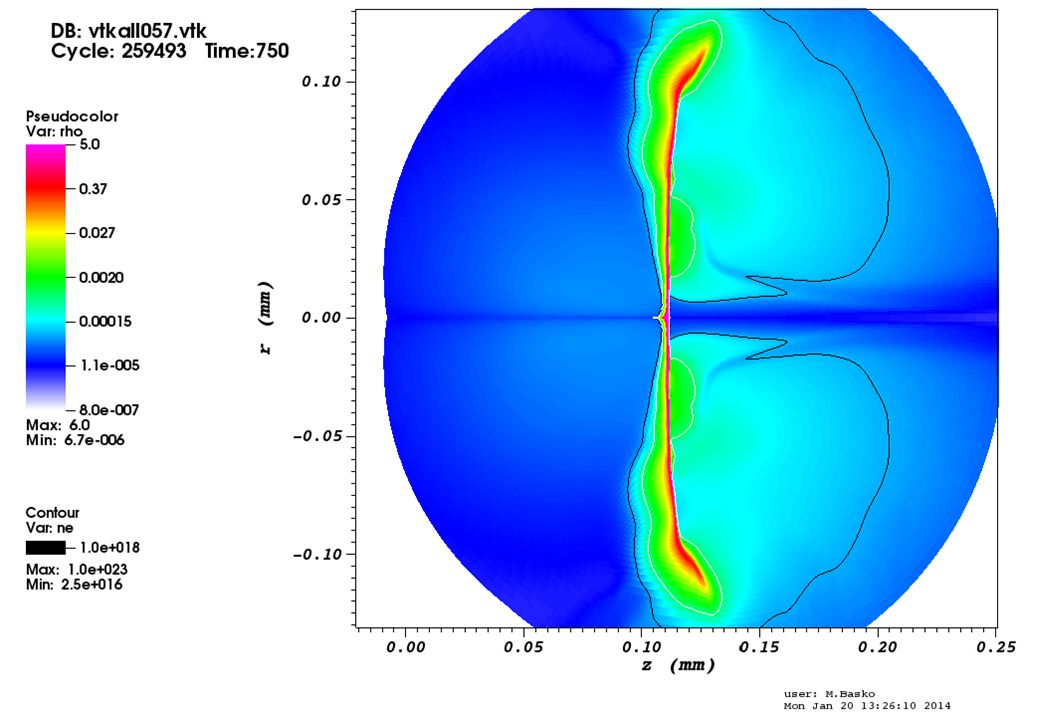
Sn droplet irradiated by CO2-laser ( = 10.6 μm)
06/04/2017 Sn droplet irradiated by CO2-laser ( = 10.6 μm) Sn microsphere: RSn = 17 μm, Rmesh = 150 μm. laser Absorbed laser energy: Elas-absorbed = 10 mJ z Peak absorbed laser flux: F00 = 6.2109 W/cm2 Slide 9: GSI-2009 Gaussian temporal profile (normalized) Gaussian spatial profile (normalized)
 Sn microsphere: RSn = 17 μm, Rmesh = 150 μm. laser. Absorbed laser energy: Elas-absorbed = 10 mJ. z. Peak absorbed laser flux: F00 = 6.2109 W/cm2. Slide 9: GSI Gaussian temporal profile (normalized) Gaussian spatial profile (normalized)")
75
Spectral Sn opacities In band: 2 -groups

76
Click to see the movie: Time is in nanoseconds

77
Evolution after the laser is turned off: equilibrium EOS

86
The effect of metastable EOS
Fully equilibrium EOS (Maxwell construction in the two-phase region) Metastable EOS (van der Waals loops in the two-phase region)
 Metastable EOS. (van der Waals loops in the two-phase region)")
87
Summary Our agenda for future work:
06/04/2017 Summary Our agenda for future work: laser deposition with refraction and reflection, hydrodynamics with metastable → stable phase transitions, material mixing, non-LTE radiation transport. Slide 51: ILE 2010

Similar presentations