Download presentation
Presentation is loading. Please wait.

1
Representation of spatial data
GIS thematic layers, raster and vector, conversion, subdivision representation, continuous data: contours, DEMs, TINs

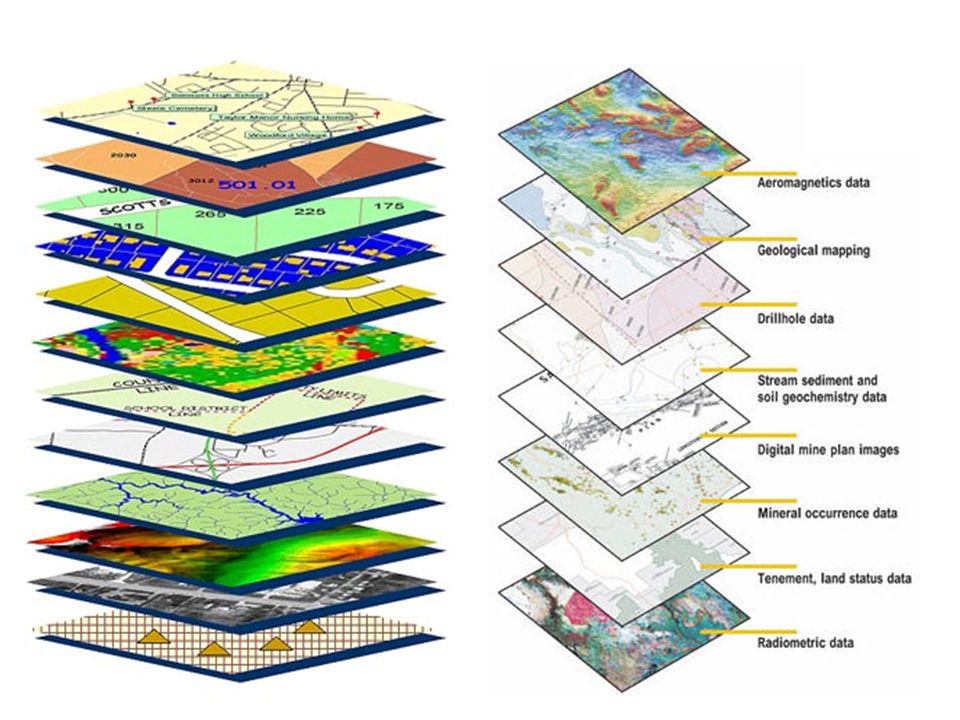
2
Thematic map layers Separate storage of data according to theme: map layers (or data layers) GIS typically use tens to hundreds of map layers For example: municipality borders, land use, cadastral boundaries, water pipes, churches, etc.

4
Example map layers Census data, 1995 (U.S.A.)
")
5
Geometry, topology and attributes
Geometry: coordinates Topology: adjacency relations of objects Attributes: properties, values Example: Country map of South America Geometry: coordinates of the borders Topology: which countries border which Attributes: names of countries, population, etc.

6
Representation of geometry
Two main approaches: raster and vector Can also be mixed in a GIS, any map layer Conversion raster-vector and vice versa possible Representation depends on type of data, way of acquisition, desired operations, etc.

7
Raster structure Division of space into equal-size cells (squares, pixels) Theme gives cells a value (nominal, ordinal, interval, ratio, vector, …) Cells should not contain any further spatial information (more detail)
![]()
8
Data in raster form Point object in raster form Line object in
Plane object in raster form

9
Raster maps

10
Raster: pros and cons Simple structure Simple operations
Obtained after scanning, remote sensing Less suitable for point and line objects: representation does not follow intuition Network analysis difficult Not adaptive: no difference in detail possible in different regions Either expensive in memory, or little precision Not obtained after digitizing

11
Raster: memory reduction
Run-length encoding: no 2-dim array but coding start pixel with value and length of run Block encoding: 2-dim version Disadvantage: makes structure and operations much more complex (34,67) forest 9 (34,67) forest 4,6
 forest 9. (34,67) forest 4,6.")
12
Vector structure Objects stored as points, lines and areas
Points have coordinates; lines connect points; areas are delimited by lines Attributes are stored with the objects (point, line or areal)
")
13
Vector: pros and cons Elegant structure; fits with both point, line and areal objects Small storage consumption Precise Adaptive: additional control points possible Network and cluster analysis possible Obtained after digitizing Relatively complex Map overlay and buffer computation complex

14
Vector representation of a region
Not necessarily simply-connected: NL has islands NL has holes (Baarle-Nassau / Baarle-Hertog); there are even regions in these holes
; there are even regions in these holes.")
16
Representation of subdivisions

17
Subdivisions: spaghetti model
Every chain is represented by a list with coordinate pairs Split nodes are doubly stored Areas are not present explicitly C1 C2 C5 C4 C3 C6 C1: (..,..), (..,..), (..,..), ... C2: (..,..), (..,..), (..,..), ... C3: (..,..), (..,..), (..,..), ...
, (..,..), (..,..), ... C2: (..,..), (..,..), (..,..), ... C3: (..,..), (..,..), (..,..), ...")
18
Subdivisions: polygon ring structure
Every area is represented by a list with coordinate pairs Control points are doubly stored Neighbor areas are difficult to determine Consistency is difficult to maintain P1 P2 Consistency here refers to the property that a set of polygons should form a partition of a region. If you change the boundary of one polygon, you must change the boundaries of one or more other polygons as well to maintain the property that the polygons form a subdivision. Technically, consistency is not difficult to maintain, but it is an implementation hassle and causes inefficiency of updates, because these other polygons must be retrieved and changed as well. P3 P1: (..,..), (..,..), (..,..), ... P2: (..,..), (..,..), (..,..), ... P3: (..,..), (..,..), (..,..), ...
, (..,..), (..,..), ... P2: (..,..), (..,..), (..,..), ... P3: (..,..), (..,..), (..,..), ...")
19
Subdivisions: topological structure (node-link structure)
Nodes are objects with coordinates Edges are connections of nodes Sequences of edges along polygon boundaries form cycles Polygons are objects that can access their boundaries Doubly-connected edge list

20
Subdivisions: topological structure
Edges are split into directed half-edges Half-edges have pointers to Twin half-edge Origin vertex Next and Prev half-edges of incident polygon Incident polygon Polygons have pointers to half-edges, one in each bounding cycle Origin polygon Twin Prev Next polygon

21
Subdivisions: topological chain structure
Splitting nodes are objects with coordinates Chains are connections between splitting nodes and contain zero or more nodes with coordinates Sequences of chains along polygon boundaries form cycles Polygons are objects that can access their boundaries half-chains Doubly-connected chain list

22
Vector structures Memory Duplication Polygon Topology
retrieve retrieve Spaghetti Polygon ring DC edge list DC chain list Topology retrieve refers to the topology of the subdivision: region objects have a way to access adjacent regions efficiently. With a doubly-connected chain list, this comes down to following the chains and always looking at the other side of the chain for an adjacent region. This takes time linear in the number of adjacent regions, while for the doubly-connected edge list this takes time linear in the number of edges in the boundary of the region (which is much more). For the spaghetti and polygon ring structures, there is no easy access to adjacent regions and you have to traverse whole tables in the database.
. For the spaghetti and polygon ring structures, there is no easy access to adjacent regions and you have to traverse whole tables in the database.")
23
Raster-vector conversion
E.g. for data integration Vector-to-raster: Like in computer graphics: scan-conversion of lines, etc. Raster-to-vector: Consider pixel sides between pixels with different values as boundary and put in vector representation Thinning, line simplification

24
Thinning Raster-vector conversion Thinning

25
Line simplification Douglas-Peucker algorithm from 1973
Input: chain p1, …, pn and error p1 pn

26
DP-algorithm Draw line segment between first and last point
If all points in between are within error: ready Otherwise, determine farthest point and recursively continue on the part until farthest point and the part after farthest point

27
DP-algorithm DP-standard(i, j, )
Determine farthest point pk between pi and pj If distance(pk, pi pj) > then DP-standard(i, k, ) DP-standard(k, j, ) Return the concatenation of the simplifications
 > then DP-standard(i, k, ) DP-standard(k, j, ) Return the concatenation of. the simplifications.")
28

29

30
Properties of the DP-algorithm
DP-algorithm does not minimize the number of points in the simplification DP-algorithm Optimal

31
Properties of the DP-algorithm
Determining farthest point takes O(n) time Whole algorithm takes T(n) = T(m) + T(n-m+1) + O(n), T(2) = O(1) time, splitting in m and n-m+1 points “Fair” split gives O(n log n) time Worst case gives quadratic time
 time. Whole algorithm takes T(n) = T(m) + T(n-m+1) + O(n), T(2) = O(1) time, splitting in m and n-m+1 points. Fair split gives O(n log n) time. Worst case gives quadratic time.")
32
Properties of the DP-algorithm
DP-algorithm may give self-intersections in the output Solution: test output for self-intersections and continue adding control points if necessary

33
Improved DP-algorithm
DP-improved(i, j, ) Simp = DP-standard(i, j, ) V = set of intersecting segments of Simp Repeat For all segments s V: Refine(s) in Simp; do 1 refinement à la DP by adding the farthest point, giving a new Simp V = set of intersecting segments of Simp Until V is empty
 Simp = DP-standard(i, j, ) V = set of intersecting segments of Simp Repeat. For all segments s V: Refine(s) in Simp; do 1 refinement à la DP by adding the farthest point, giving a new Simp V = set of intersecting segments of Simp Until V is empty.")
34
Continuous data representation
Digital Elevation Model (DEM) Data on interval or ratio measurement scale Data values of points near by will usually be not very different Representation is necessarily an approximation: finite representation of information with infinite detail Raster (1x) or vector (2x)
 Data on interval or ratio measurement scale. Data values of points near by will usually be not very different. Representation is necessarily an approximation: finite representation of information with infinite detail. Raster (1x) or vector (2x)")
35
Elevation models Raster Vector Vector (Elevation) grid
21 20 21 20 15 20 19 25 10 10 (Elevation) grid Contour line model Triangulation (TIN; triangulated irregular network)
 grid. Contour line model. Triangulation (TIN; triangulated irregular network)")
36
Grid elevation model

37
TIN elevation model

38
Elevation models Contour model well-suited for visualisation, not for representation or storage Interpretations grid: - elevation whole cel: not a continuous model - elevation middle cel: interpolation needed; how? Advantage grid: simple storage, operations simple too Advantage TIN: more efficient in storage, adaptive

39
Interpolation for grid
20 18 20 18 18 22 18 22 20 18 Linear interpolation; saddle point problem 18 22 20 18 20 18 18 22 18 22 Linear interpolation; additional point 4 = 19.5 Non-linear interpolation

40
Topological TIN structure
With explicit vertex and triangle representation t2 w t3 t1 t1 t2 t t u v u w t3 v x, y-coordinates and elevation

41
Topological TIN structure
With explicit vertex and triangle representation t2 w t3 t1 t1 t2 t t u v u w t3 v Because t1 has pointers to two the same vertices as t, we can determine their shared edge, even though it is not represented explicitly

42
Topological TIN structure
With explicit vertex and triangle representation w w t1 t2 t2 t1 t u v t t3 v u t3

43
Topological TIN structure
Alternatively, edges have an explicit representation too w t1 t2 w t1 t e1 e2 e1 e2 u e3 v t3 t u v e3

44
Summary representation
Objects have geometry and attributes, at least the attributes are in a database Geometry can be stored in raster or vector form; each has advantages and disadvantages Important geometric types of representations are those for subdivisions and for elevation models For subdivisions, the doubly-connected chain list is the most suitable structure For elevation models, grids or TINs are most useful

Similar presentations





>")



 be a point. We want to estimate an elevation at a point q: 1. should.>")




>")





