Download presentation
Presentation is loading. Please wait.

1
Chrisantha Fernando & Sampsa Sojakka
The Liquid Brain Chrisantha Fernando & Sampsa Sojakka

2
Motivations Only 30,000 genes, ≈1011 neurons
Attractor neural networks, Turing machines Problems with classical models Often depend on synchronization by a central clock Particular recurrent circuits need to be constructed for each task Recurrent circuits often unstable and difficult to regulate Lack parallelism Real organisms cannot wait for convergence to an attractor Wolfgang Maass’ invented the Liquid State Machine (a model of the cortical microcircuit) in which he viewed the network as a liquid (or liquid-like dynamical system).
 in which he viewed the network as a liquid (or liquid-like dynamical system).")
3
Liquid State Machine (LSM)
Maass’ LSM is a spiking recurrent neural network which satisfies two properties Separation property (liquid) Approximation property (readout) LSM features Only attractor is rest Temporal integration Memoryless linear readout map Universal computational power: can approximate any time invariant filter with fading memory It also does not require any a-priori decision regarding the ``neural code'' by which information is represented within the circuit. Real-time computation using liquid metaphor, I.e. although only one attractor state (rest), liquid represents past inputs with unbiased analog fading memory. Liquid must be sensitive to saliently different inputs but non-chaotic (separation property). Limitations on the computational capabilities of real liquids imposed by their time-constants, strictly local interactions, homogeneity of the elements of the liquid.” So Maass develops “Liquids” consisting of Spiking Neurons. Large variety of mechanisms and time-constants. Recurrent connections on multiple spatial scales. He demonstrates real-time UCP. Whereas Turing machines have universal computational power for off-line computation on (static) discrete inputs, LSMs have UCP for real-time computing with fading memory on analog functions in continuous time. The state-transition-function of the LSM is task-independent (“found circuitry”) and the readout is memory-less. The LSM only has to satisfy a “Separation Property” for a linear readout element to be able to make any discrimination, or map any input function. It also does not require any a-priori decision regarding the ``neural code'' by which information is represented within the circuit.
 Approximation property (readout) LSM features. Only attractor is rest. Temporal integration. Memoryless linear readout map. Universal computational power: can approximate any time invariant filter with fading memory. It also does not require any a-priori decision regarding the ``neural code by which information is represented within the circuit. Real-time computation using liquid metaphor, I.e. although only one attractor state (rest), liquid represents past inputs with unbiased analog fading memory. Liquid must be sensitive to saliently different inputs but non-chaotic (separation property). Limitations on the computational capabilities of real liquids imposed by their time-constants, strictly local interactions, homogeneity of the elements of the liquid. So Maass develops Liquids consisting of Spiking Neurons. Large variety of mechanisms and time-constants. Recurrent connections on multiple spatial scales. He demonstrates real-time UCP. Whereas Turing machines have universal computational power for off-line computation on (static) discrete inputs, LSMs have UCP for real-time computing with fading memory on analog functions in continuous time. The state-transition-function of the LSM is task-independent ( found circuitry ) and the readout is memory-less. The LSM only has to satisfy a Separation Property for a linear readout element to be able to make any discrimination, or map any input function. It also does not require any a-priori decision regarding the ``neural code by which information is represented within the circuit.")
4
Maass’ Definition of the Separation Property
The current state x(t) of the microcircuit at time t has to hold all information about preceding inputs. Approximation Property Readout can approximate any continuous function f that maps current liquid states x(t) to outputs v(t).
 of the microcircuit at time t has to hold all information about preceding inputs. Approximation Property. Readout can approximate any continuous function f that maps current liquid states x(t) to outputs v(t).")
5
We took the metaphor seriously and made the real liquid brain shown below. WHY?

6
BECAUSE. Real water is computationally efficient.
Maass et al. used a small recurrent network of leaky integrate-and-fire neurons But it was computationally expensive to model. And I had to do quite a bit of parameter tweaking. Exploits real physical properties of water. Simple local rules, complex dynamics. Potential for parallel computation applications. Educational aid, demonstration of a physical representation that does computation. Contributes to current work on computation in non-linear media, e.g. Adamatsky, Database search.

7
Pattern Recognition in a Bucket
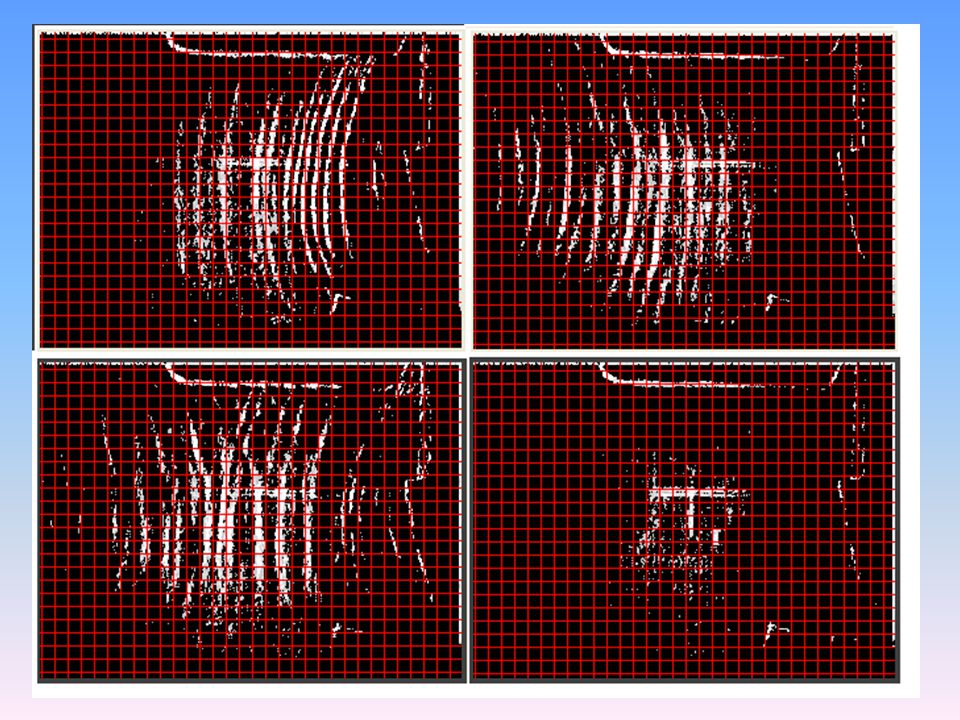
8 motors, glass tray, overhead projector Web cam to record footage at 320x240, 5fps Frames Sobel filtered to find edges and averaged to produce 700 outputs 50 perceptrons in parallel trained using the p-delta rule

8
Experiment 1: The XOR Problem.

10
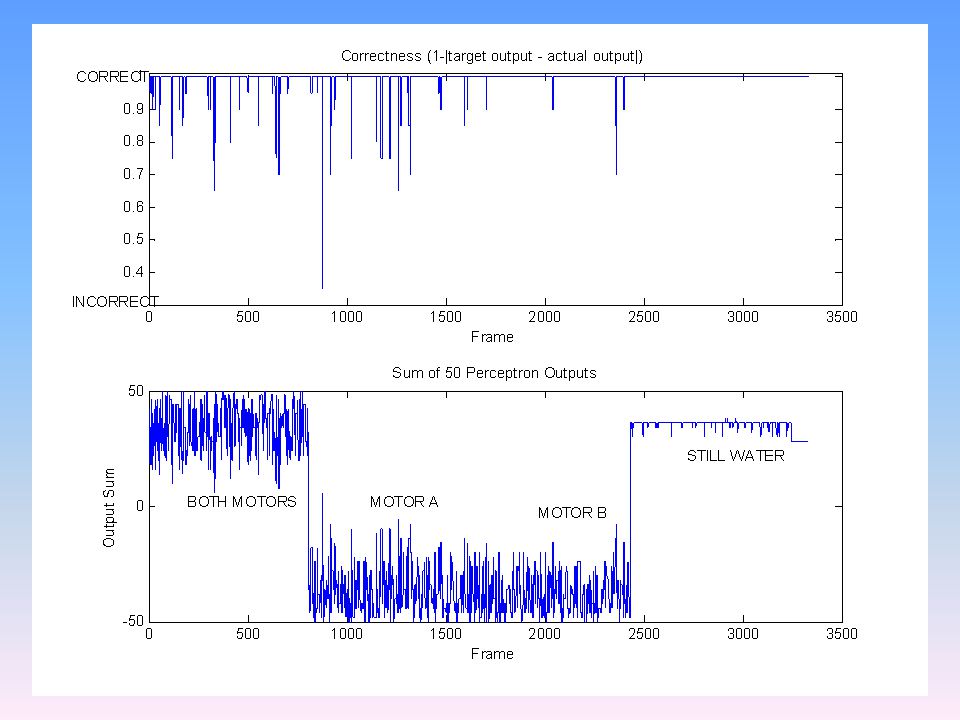
2 motors, 1 minute footage of each case, 3400 frames
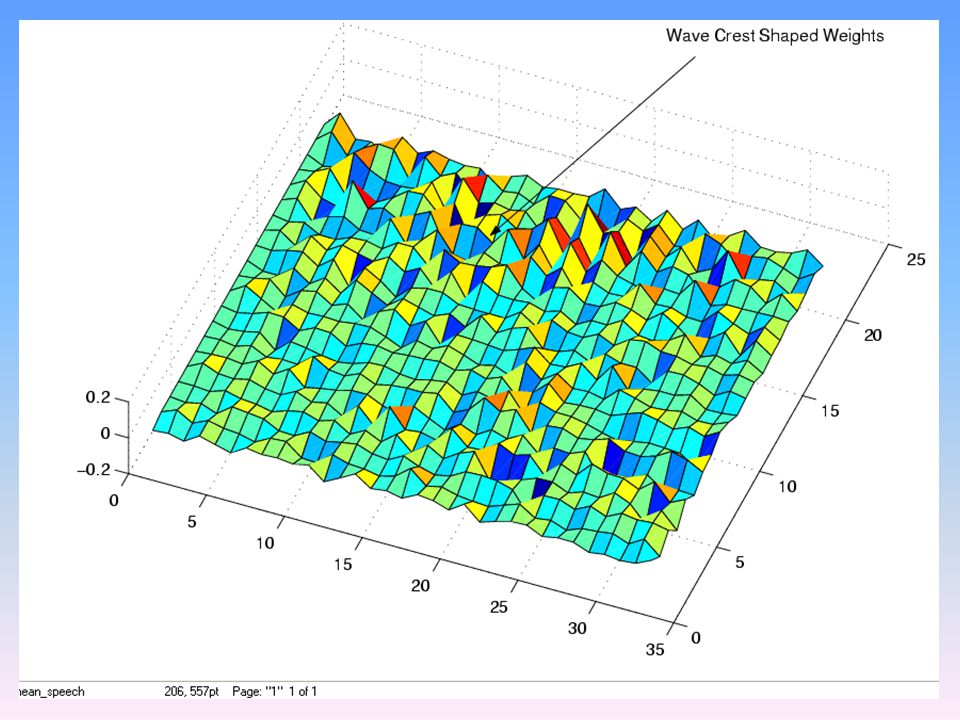
Readouts could utilize wave interference patterns

17
Can Anyone Guess How it Works?

20
Experiment 2 : Speech Recognition

21
Each sample to drive motors for 4 seconds, one after the other
Objective: Robust spatiotemporal pattern recognition in a noisy environment 20+20 samples of 12kHz pulse-code modulated wave files (“zero” and “one”), seconds in length Short-Time Fourier transform on active frequency range (1-3000Hz) to create a 8x8 matrix of inputs from each sample (8 motors, 8 time slices) Each sample to drive motors for 4 seconds, one after the other Hopfield and Brody experiments showed that transient synchrony of the action potentials of a group of spiking neurons can be used to signal recognition of a space-time pattern across the inputs of those neurons – we show that water can produce this Sound files had to be pre-processed due to small time constant of relaxation of liquid (time window of 3-4sec), limited number of inputs motors, resolution of the camera Limitations in motor frequency response (could be changed only every 0.5 sec) hence 8 time slices (sliding window size set to the closest power of 2 of the sample length) Lot of noise in inputs: variation in amplitude, intonation
, seconds in length. Short-Time Fourier transform on active frequency range (1-3000Hz) to create a 8x8 matrix of inputs from each sample (8 motors, 8 time slices) Each sample to drive motors for 4 seconds, one after the other. Hopfield and Brody experiments showed that transient synchrony of the action potentials of a group of spiking neurons can be used to signal recognition of a space-time pattern across the inputs of those neurons – we show that water can produce this. Sound files had to be pre-processed due to small time constant of relaxation of liquid (time window of 3-4sec), limited number of inputs motors, resolution of the camera. Limitations in motor frequency response (could be changed only every 0.5 sec) hence 8 time slices (sliding window size set to the closest power of 2 of the sample length) Lot of noise in inputs: variation in amplitude, intonation.")
22
Zero One

26
Generalisation poor (~35% error)
Overtraining? Training set was very large Local minima in a linear readout corresponds to the global minima (no hidden nodes!) – from support vector machine research We have many sources of error though All sound samples effectively different (intonation, amplitude, timing, intensity) Sounds input into the water sequentially -> sequence leaves residue in liquid state Motor frequencies fluctuated widely (drive shafts deteriorated with use) Movement of motors / camera / tank Camera frame rate varied No attempts were made to remove any of the noise
 – from support vector machine research. We have many sources of error though. All sound samples effectively different (intonation, amplitude, timing, intensity) Sounds input into the water sequentially -> sequence leaves residue in liquid state. Motor frequencies fluctuated widely (drive shafts deteriorated with use) Movement of motors / camera / tank. Camera frame rate varied. No attempts were made to remove any of the noise.")
28
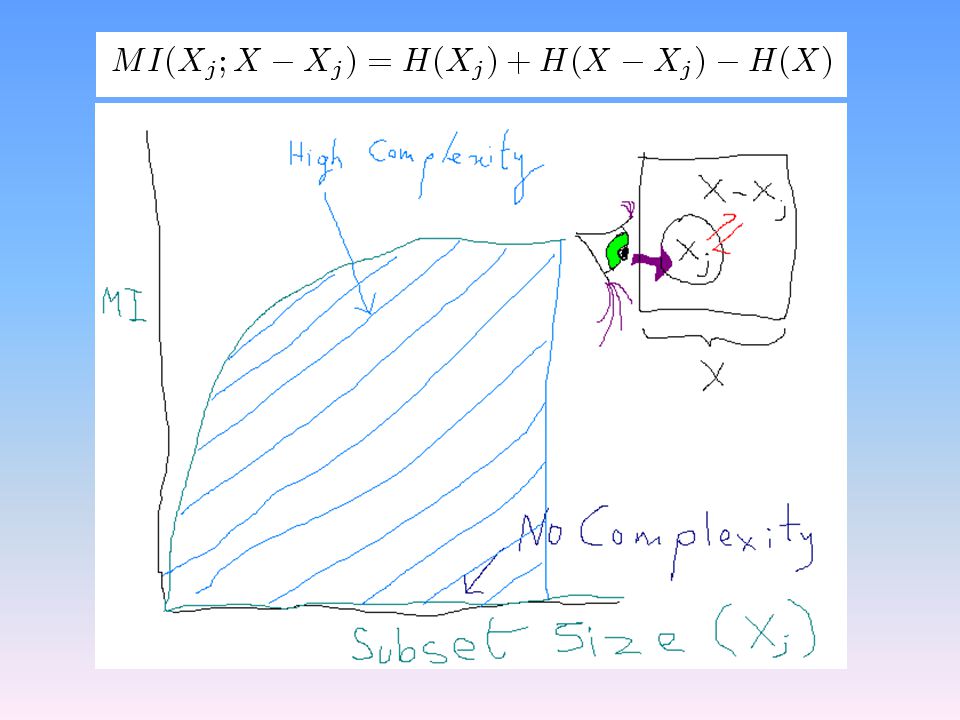
Analysis

33
Conclusion Properties of a natural dynamical system (water) can be harnessed to solve non-linear pattern recognition problems. Set of simple linear readouts suffice. No tweaking of parameters required. Further work will explore neural networks which exploit the epigenetic self-organising physical properties of materials.

34
Acknowledgements Inman Harvey Phil Husbands Ezequiel Di Paolo
Emmet Spier Bill Bigge Aisha Thorn, Hanneke De Jaegher, Mike Beaton. Sally Milwidsky

Similar presentations